一种深海养殖网箱巡检装置及巡检方法
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及水下机器人技术领域,尤其是一种深海养殖网箱巡检装置及巡检方法。
背景技术
中国是海洋渔业养殖超级大国,随着沿海养殖污染问题的日益严重,智能化、自动化、科学化的深海养殖已经成为海洋渔业养殖的发展方向,其中,大型深海养殖网箱及其配套设施的发展尤为重要。渔网破损情况、渔网生物攀附滋生等情况是深海网箱养殖过程中常见的问题,渔网破损容易造成鱼类逃脱或者食物链顶层生物的混入,造成鱼类产量下降;渔网生物攀附滋生影响网箱内水体代谢速率,并影响水质,造成鱼类品质下降,因此,对深海养殖网箱网衣的健康状态巡检在养殖过程中具有重大意义。
目前,深海养殖网箱网衣巡检的方法多采用人工巡检和ROV巡检。其中,人工巡检过程中,传统的潜水员由于身体承受能力原因只能检测60米以浅的网箱网衣,且工作时间有限,通常单人一次只能工作半小时,更深的网箱网衣目前采用较多的为水下无人潜水器(ROV)。然而,ROV只能由人员操作,操作员需要处理大量信息并频繁操作ROV,工作强度大,工作效率低,同时,由于ROV多为开架式结构,网衣为柔性材质,如果操作不当,ROV容易与网衣发生缠绕,影响巡检作业。同时,由于深海养殖网箱多在远海,远离陆地,上述两种方法均需要通过水面船舶将人员和设备运送至深海养殖网箱所在海域然后进行作业,受海况和天气条件影响大,且成本高,经济性较差。
发明内容
本申请人针对上述现有生产技术中的缺点,提供一种深海养殖网箱巡检装置及巡检方法,从而巡检装置常驻在深海养殖网箱内,可周期性或根据岸基远程指令自主对网箱网衣进行巡检,并通过网箱控制中心将巡检数据发送至岸基中心用于巡检结果分析。
本发明所采用的技术方案如下:
一种深海养殖网箱巡检装置,包括机库和巡检机器人,
还包括深海养殖网箱,所述深海养殖网箱上固定有安装基座,深海养殖网箱的顶面固定有深海养殖网箱控制中心,所述安装基座上固定刚性连接有机库,机库的顶面放置巡检机器人,所述机库通过脐带缆与深海养殖网箱控制中心连接,形成供电与通信通道,巡检机器人和机库之间通过水下无线传输技术实现电能与信息的传输。
其进一步技术方案在于:
所述巡检机器人的结构为:包括滚动机构、推进系统、观通系统、导航定位系统、控制系统、供电系统和对接系统;
所述载体结构包括载体框架、浮力块和轻外壳,所述载体框架采用管材焊接而成,内方外圆,分成上下两层,所述载体框架的上方安装有浮力块,载体框架的底面和侧面安装有轻外壳;
所述滚动机构共上下两套,每一套包括滚动环、马达组件和滚动轴承,所述载体框架外圈圆环、滚动环和轴承滚珠构成滚动轴承;
所述推进系统包括安装在载体框架上的水平推进器和垂向推进器;
所述观通系统包括安装在巡检机器人艏部的高清摄像机、水下灯;
所述导航定位系统包括GPS、DVL、惯导模块、通讯定位声纳和深度、高度一体计;
对接系统包括充电通信对接凸台、对接声纳和微光摄像机。
浮力块和轻外壳共同构成了巡检机器人的碟型外形。
所述马达组件共设置有三台,分别布置在巡检机器人的舷侧艉部。
载体框架内部方形区域内设置有控制舱和电池舱,所述马达组件采用电动马达,通过缆线分别与控制舱和电池舱连接,马达组件驱动滚动环顺时针或逆时针转动;所述水平推进器和垂向推进器均通过缆线与控制舱和电池舱连接;控制舱内安装惯导模块;控制系统在控制舱内,供电系统安装在电池舱内。
充电通信对接凸台布置在巡检机器人的底部中央,与机库匹配。
充电通信对接槽和引导信标,机库本体安装固定在安装基座上,为设备的安装和巡检机器人的停放提供基础,机库本体的上表面为圆弧面,与巡检机器人的下表面贴合;
充电通信对接槽布置在机库本体的中心位置;
引导信标共四个,前后左右各布置一个。
所述高清摄像机共设置有两台,沿巡检机器人的中纵剖面对称布置。
水下灯工设置有四台,沿巡检机器人中纵剖面和上剖面对称布置。
深海养殖网箱巡检装置的巡检方法,包括如下操作步骤:
第一步:巡检机器人根据预设周期开启巡检作业,自主启动,所有设备上电,控制垂向推进器使巡检机器人向上驶出机库;
第二步:按规划路径自主控制水平推进器和垂向推进器调整巡检机器人的位置,使巡检机器人航行至深海养殖网箱巡检初始位置,高清摄像机正对深海养殖网箱的网衣,同时,滚动环抵在网衣的表面上;
第三步:通过控制系统自主控制马达组件运行,驱动滚动环转动,同时,通过控制系统的推力分配算法自动调节水平推进器和垂向推进器的推力,在滚动机构和推进系统的协同作用下,巡检机器人在水平面内沿网衣快速移动,高清摄像机在水下灯的配合下获取并记录网衣光学图像,通过图像识别算法,实时完成对网衣健康情况的判断,此时,通过通讯定位声纳实时向机库反馈巡检机器人的运行参数信息,并通过深海养殖网箱控制中心将运行参数信息传输至岸基中心,对巡检机器人的运行情况实时监控;
第四步:巡检机器人在水平面内沿网衣移动一周并回到的周向初始位置后,巡检机器人控制水平推进器使巡检机器人的滚动环与网衣脱离,然后,控制垂向推进器,在导航定位系统的协同作用下,使巡检机器人向下移动,移动距离为上下两个滚动环之间的垂向距离;
第五步:重复步骤第三步和第四步,直至巡检机器人完成所有网衣的巡检;
第六步:完成巡检后,控制水平推进器使巡检机器人的滚动环与网衣脱离,并航行至深海养殖网箱的中心位置,控制垂向推进器使巡检机器人上浮至水面,对接声纳接收引导信标的声学信号,获取巡检机器人与机库之间的相对空间位置信息,控制系统以相对空间位置信息为基础,控制推进系统使巡检机器人向机库航行,直至航行至机库的正上方;
第七步:利用对接声纳与引导信标之间一一对应的关系,控制推进系统完成巡检机器人艏向的调整和保持,同时,通过微光摄像机113,结合图像匹配算法和运动控制算法控制,在推进系统的协同作用下,控制系统以充电通信对接槽中心标定点与光学图像中心位置重合为目标引导巡检机器人向机库移动,当巡检机器人的充电通信对接凸台进入充电通信对接槽并锁死,完成对接;
第八步:巡检机器人将网衣巡检图像数据和巡检结果通过深海养殖网箱控制中心传输至岸基中心,共工作人员查看和分析;
第九步:巡检机器人关机,开启充电模式。
本发明的有益效果如下:
本发明结构紧凑、合理,操作方便,将巡检装置常驻在深海养殖网箱内,可周期性或根据岸基远程指令自主对网箱网衣进行巡检,并通过网箱控制中心将巡检数据发送至岸基中心用于巡检结果分析。本发明无需水面船舶支持,且不受水深和天气条件限制,可实现全天候作业,具有作业实时性强、作业稳定可靠、作业效率高、劳动强度小等明显优势。
同时,本发明还具备如下优点:
(1)本发明不受作业水深限制,实现深海养殖网箱网衣巡检作业全覆盖;
(2)本发明无需水面船舶支持,且不受天气条件限制,可实现全天候作业;
(3)本发明无需人员亲临现场,通过与深海养殖网箱控制中心及岸基中心形成动态组网,实现了远程监控和全方位的信息交互,同时通过两种作业模式可周期性或根据岸基远程指令即时对网箱网衣进行自主巡检作业,具有作业实时性强、作业稳定可靠、作业效率高、劳动强度小等明显优势;
(4)本发明设有滚动机构,在保证巡检机器人与网衣之间相对位置的同时,与推进系统协同作用,实现了巡检机器人沿网衣快速、稳定地移动,大幅提升了巡检作业效率;
(5)本发明采用碟型外形,避免了与网衣发生缠绕的可能性。
(6)本发明具有两种作业模式,一是根据预设周期,定期自主对网箱网衣进行巡检,二是接收岸基中心命令,即时自主对网箱网衣进行巡检。
附图说明
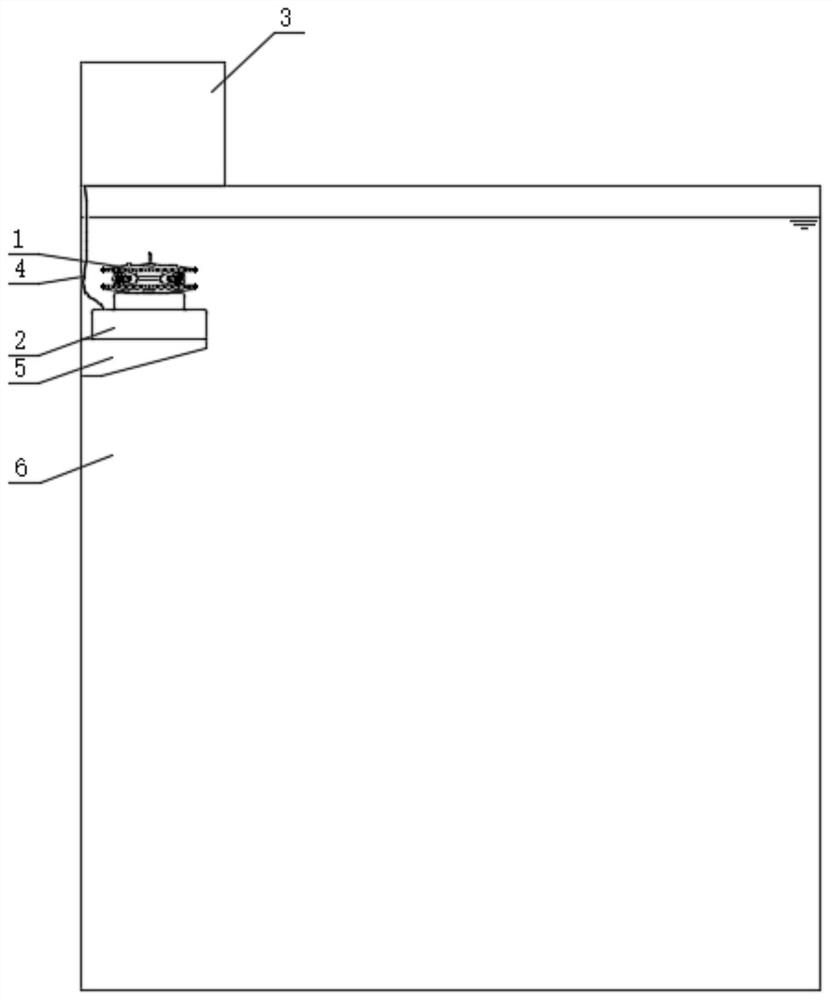
图1为本发明的结构示意图。
图2为本发明巡检机器人的结构示意图。
图3为本发明巡检机器人的内部结构示意图。
图4为本发明巡检机器人另一视角的结构示意图。
图5为本发明巡检机器人的俯视图。
图6为本发明巡检机器人的仰视图。
图7为本发明巡检机器人的主视图。
图8为图7中沿A-A截面的全剖视图。
图9为本发明机库的结构示意图。
其中:1、巡检机器人;2、机库;3、深海养殖网箱控制中心;4、脐带缆;5、安装基座;6、深海养殖网箱;
101、浮力块;102、GPS;103、通讯定位声纳;104、载体框架;105、马达组件;106、滚动环;107、垂向推进器;108、控制舱;109、水平推进器;110、电池舱;111、DVL;112、充电通信对接凸台;113、微光摄像机;114、对接声纳;115、深度、高度一体计;116、轻外壳;117、水下灯;118、高清摄像机;119、轴承滚珠;
201、引导信标;202、充电通信对接槽;203、机库本体。
具体实施方式
下面结合附图,说明本发明的具体实施方式。
如图1-图9所示,本实施例的深海养殖网箱巡检装置,包括机库2和巡检机器人1,
还包括深海养殖网箱6,深海养殖网箱6上固定有安装基座5,深海养殖网箱6的顶面固定有深海养殖网箱控制中心3,安装基座5上固定刚性连接有机库2,机库2的顶面放置巡检机器人1,机库2通过脐带缆4与深海养殖网箱控制中心3连接,形成供电与通信通道,巡检机器人1和机库2之间通过水下无线传输技术实现电能与信息的传输。
巡检机器人1的结构为:包括滚动机构、推进系统、观通系统、导航定位系统、控制系统、供电系统和对接系统;
载体结构包括载体框架104、浮力块101和轻外壳116,载体框架104采用管材焊接而成,内方外圆,分成上下两层,载体框架104的上方安装有浮力块101,载体框架104的底面和侧面安装有轻外壳116;
滚动机构共上下两套,每一套包括滚动环106、马达组件105和滚动轴承,载体框架104外圈圆环、滚动环106和轴承滚珠119构成滚动轴承;
推进系统包括安装在载体框架104上的水平推进器109和垂向推进器107;
观通系统包括安装在巡检机器人1艏部的高清摄像机118、水下灯117;
导航定位系统包括GPS102、DVL111、惯导模块、通讯定位声纳103和深度、高度一体计115;
对接系统包括充电通信对接凸台112、对接声纳114和微光摄像机113。
浮力块101和轻外壳116共同构成了巡检机器人1的碟型外形。
马达组件105共设置有三台,分别布置在巡检机器人1的舷侧艉部。
载体框架104内部方形区域内设置有控制舱108和电池舱110,马达组件105采用电动马达,通过缆线分别与控制舱108和电池舱110连接,马达组件105驱动滚动环106顺时针或逆时针转动;水平推进器109和垂向推进器107均通过缆线与控制舱108和电池舱110连接;控制舱108内安装惯导模块;控制系统在控制舱108内,供电系统安装在电池舱110内。
充电通信对接凸台112布置在巡检机器人1的底部中央,与机库2匹配。
充电通信对接槽202和引导信标201,机库本体203安装固定在安装基座5上,为设备的安装和巡检机器人1的停放提供基础,机库本体203的上表面为圆弧面,与巡检机器人1的下表面贴合;
充电通信对接槽202布置在机库本体203的中心位置;
引导信标201共四个,前后左右各布置一个。
高清摄像机118共设置有两台,沿巡检机器人1的中纵剖面对称布置。
水下灯117工设置有四台,沿巡检机器人1中纵剖面和上剖面对称布置。
深海养殖网箱巡检装置的巡检方法,包括如下操作步骤:
第一步:巡检机器人1根据预设周期开启巡检作业,自主启动,所有设备上电,控制垂向推进器107使巡检机器人1向上驶出机库2;
第二步:按规划路径自主控制水平推进器109和垂向推进器107调整巡检机器人1的位置,使巡检机器人1航行至深海养殖网箱6巡检初始位置,高清摄像机118正对深海养殖网箱6的网衣,同时,滚动环106抵在网衣的表面上;
第三步:通过控制系统自主控制马达组件105运行,驱动滚动环106转动,同时,通过控制系统的推力分配算法自动调节水平推进器109和垂向推进器107的推力,在滚动机构和推进系统的协同作用下,巡检机器人1在水平面内沿网衣快速移动,高清摄像机118在水下灯117的配合下获取并记录网衣光学图像,通过图像识别算法,实时完成对网衣健康情况的判断,此时,通过通讯定位声纳103实时向机库2反馈巡检机器人1的运行参数信息,并通过深海养殖网箱控制中心3将运行参数信息传输至岸基中心,对巡检机器人1的运行情况实时监控;
第四步:巡检机器人1在水平面内沿网衣移动一周并回到的周向初始位置后,巡检机器人1控制水平推进器109使巡检机器人1的滚动环106与网衣脱离,然后,控制垂向推进器107,在导航定位系统的协同作用下,使巡检机器人1向下移动,移动距离为上下两个滚动环106之间的垂向距离;
第五步:重复步骤第三步和第四步,直至巡检机器人1完成所有网衣的巡检;
第六步:完成巡检后,控制水平推进器109使巡检机器人1的滚动环106与网衣脱离,并航行至深海养殖网箱6的中心位置,控制垂向推进器107使巡检机器人1上浮至水面,对接声纳114接收引导信标201的声学信号,获取巡检机器人1与机库2之间的相对空间位置信息,控制系统以相对空间位置信息为基础,控制推进系统使巡检机器人1向机库2航行,直至航行至机库2的正上方;
第七步:利用对接声纳114与引导信标201之间一一对应的关系,控制推进系统完成巡检机器人1艏向的调整和保持,同时,通过微光摄像机113,结合图像匹配算法和运动控制算法控制,在推进系统的协同作用下,控制系统以充电通信对接槽202中心标定点与光学图像中心位置重合为目标引导巡检机器人1向机库2移动,当巡检机器人1的充电通信对接凸台112进入充电通信对接槽202并锁死,完成对接;
第八步:巡检机器人1将网衣巡检图像数据和巡检结果通过深海养殖网箱控制中心3传输至岸基中心,共工作人员查看和分析;
第九步:巡检机器人1关机,开启充电模式。
本发明所述的一种深海养殖网箱网衣巡检装置的具体结构和功能如下:
包括巡检机器人1和机库2两部分。
机库2通过安装基座5与深海养殖网箱6刚性连接,机库2通过脐带缆4与深海养殖网箱控制中心3连接,形成供电与通信通道,巡检机器人1和机库2之间通过水下无线传输技术实现电能与信息的传输。
本发明中的巡检机器人1主要包括载体结构、滚动机构、推进系统、观通系统、导航定位系统、控制系统、供电系统和对接系统。
载体结构包括载体结构包括载体框架104、浮力块101和轻外壳116,其中,载体框架104由管材焊接而成,内方外圆,上下两层;浮力块101安装在载体框架104上方,根据水动力外形直接成型,为巡检机器人1提供固定浮力,保证巡检机器人1在水中实现均衡;轻外壳116安装在载体框架104的侧面和底部,保证巡检机器人1的水动力外形,对设备起到一定的保护作用。载体框架104、浮力块101和轻外壳116共同构成了巡检机器人1的碟型外形。
滚动机构共上下两套,每一套包括滚动环106、马达组件105(共三台,布置在巡检机器人1的舷侧的艉部)和滚动轴承,其中,载体框架104外圈圆环、滚动环106和轴承滚珠119构成滚动轴承。马达组件105为采用电动马达,通过缆线分别与控制舱108和电池舱110连接,通过控制系统的控制算法控制马达组件105驱动滚动环106顺时针或逆时针转动。通过与推进系统的协同作业,实现巡检机器人1沿网箱网衣快速移动,并保持观通系统与网衣之间的距离,保证观通系统获取网衣光学图像的稳定性。
推进系统安装在载体框架104上的水平推进器109(共四台,矢量布置)和垂向推进器107(共三台,布置在巡检机器人1的舷侧的艉部),各推进器通过线缆分别与控制舱108和电池舱110连接,自主控制实现巡检机器人1的前进、后退、左移、右移、左转、右转、上浮、下潜、纵倾和横倾运动。同时,通过控制系统的推力分配算法,可实现定向、定深、定高、水中悬停等运动控制功能。
观通系统包括安装在巡检机器人1艏部的高清摄像机118(共两台,沿中纵剖面对称布置)、水下灯117(共四台,沿中纵剖面和上剖面对称布置)和通讯定位声纳103,各设备通过线缆分别与控制舱108和电池舱110连接。其中,高清摄像机118采用双目视觉技术,提升巡检机器人1的视域广度,增强巡检能力;水下灯117为网衣巡检作业提供光源。通讯定位声纳103布置在巡检机器人1的顶端,实现巡检机器人1与机库2之间的水声通讯功能。以观通系统采集网衣的光学图像为基础,通过图像识别算法,实时完成对网衣健康情况的判断,通过通讯定位声纳103实时向机库2反馈巡检机器人1的运行参数信息。
导航定位系统包括GPS102、DVL111、惯导模块(安装在控制舱108内)、通讯定位声纳103和深度、高度一体计115,采用多传感器数据融合技术,保证巡检机器人1的导航定位精度。同时,实时匹配观通系统所采集的网衣光学图像的位置信息,实现网衣缺陷的定位,为后续的网衣维护奠定基础。
控制系统在控制舱108内,控制舱108安装在载体框架104的内部。控制舱108通过缆线与对接系统中的充电通信对接凸台112连接,实现巡检数据的传输。
供电系统在电池舱110内,包括锂电池组、电池管理模块和配电装置,电池舱110安装在载体框架104的内部。电池舱110通过缆线与对接系统中的充电通信对接凸台112连接,实现对锂电池组的充电。
对接系统包括充电通信对接凸台112、对接声纳114(共四个,前后左右各布置一个)和微光摄像机113。充电通信对接凸台112布置在巡检机器人1的底部中央,与机库2中的充电通信对接槽202匹配,采用水下无线传输技术,在两者对接后,可完成电能和数据的传输。对接声纳114布置在巡检机器人1底部,每个声纳分别与机库2中的引导信标201一一对应,实现对巡检机器人1的远程声学位置引导和近距离方向引导。微光摄像机113布置在充电通信对接凸台112的中央,通过图像匹配算法和运动控制算法控制,在推进系统的协同作用下,实现对巡检机器人1的近距离位置引导。
如图9所示,本发明中的机库2主要包括机库本体203、充电通信对接槽202和引导信标201。
机库本体203安装固定在安装基座5上,为设备的安装和巡检机器人1的停放提供基础。其上表面为圆弧面,与巡检机器人1的下表面贴合。
充电通信对接槽202布置在机库本体203的中心位置,与巡检机器人1中的充电通信对接凸台112相匹配,可完成与巡检机器人1的电能、数据和控制指令的传输。
引导信标201共四个,前后左右各布置一个,与巡检机器人1中的对接声纳114一一对应,实现对巡检机器人1的远程声学位置引导和近距离方向引导。
以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。
- 一种深海养殖网箱巡检装置及巡检方法
- 一种深海网箱养殖装置及养殖方法