一种基于累积前景价值和三支决策的态势评估方法与系统
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及无人机态势评估,具体涉及一种基于累积前景价值和三支决策的态势评估方法与系统。
背景技术
无人机态势评估是指评估敌我双方的战斗力要素,对整体战场态势进行判断,帮助飞行员做出正确决策。对敌机态势进行合理评估是进行火力分配和机动决策的前提。在评估过程中,由于无人机本身动力较小,容易受天气,地形等环节因素的影响,导致无人机态势感知得到的信息不完全可靠,具有不确定性和模糊性;同时复杂的外界环境对决策者的个人偏好产生重要影响,因此,在无人机态势评估的过程中要同时考虑评价对象的不确定性和决策者的主观偏好,使决策过程更加符合战场实际环境和飞行员的心理行为。
当前,无人机态势评估方法有很多。常用的方法包括云模型,神经网络,贝叶斯网络,异构群体决策,模糊集与直觉模糊集理论,多属性决策理论等。当前的评估方法存在一些问题。一般的评估方法只能处理静态的态势信息,无法适应瞬息万变的战场环境。为解决上述问题,提出了基于动态直觉模糊法的威胁评估方法,综合多个时刻的信息。多数情况下的评估方法只能得到评估的排序结果,仍需飞行员进行决策判断,并且飞行员在决策过程中多为二支决策,即判断是否对敌机进行攻击,对于中等威胁的目标,需要更多的信息进行判断,评估过程较困难,同时外界的复杂环境会影响决策者的个人偏好,而以往的评估过程中没有考虑决策者的主观偏好和风险态度。
发明内容
发明目的:本发明为了解决无人机态势评估问题,提出一种基于累积前景价值和三支决策的态势评估方法与系统,能够解决态势评估中决策困难和忽略决策者个人偏好的问题,通过三支决策得到具体的决策措施,由不同的目标信息得到不同的参考点,从而反映出面对不同态势时不同的决策偏好和风险态度。
技术方案:本发明所述的一种基于累积前景价值和三支决策的态势评估方法,包括以下步骤:
(1)将无人机态势感知得到的目标信息进行规范化,得到规范化目标信息矩阵,构建决策理论中的状态集和行动集,
(2)根据目标信息矩阵计算累积前景价值理论中的参考点和每个目标的结果矩阵;所述参考点采用指标加权平均值计算;
(3)根据上述得到的参考点,结果矩阵和概率计算每个目标采取执行、进一步研究和不执行动作的三个累积前景价值;
(4)对每个目标的三个累积前景价值进行比较,根据累积前景价值最大规则得到决策结果。
进一步地,所述步骤(1)根据如下方法得到规范化目标信息矩阵:
无人机感知到的目标信息矩阵表示为X=(x
对于效益型指标:
对于成本型指标:
其中,max
进一步地,所述步骤(1)根据如下公式计算每个目标是否属于集合C的概率:
对于效益型指标:
对于成本型指标:
其中,Pr(C|T
进一步地,根据熵值法计算每个指标的权重:
首先计算第i个目标在第j个指标下所占的比例:
然后计算第j个指标的信息熵:
最后计算第j个指标的权重:
进一步地,所述步骤(2)根据以下公式计算每个目标的结果矩阵:
其中,x(z
进一步地,所述步骤(2)根据以下公式计算所有目标的参考点:
进一步地,所述步骤(3)每个目标的累积前景价值为累积权重函数π
价值函数的公式表示如下:
其中,μ和v为风险态度系数,θ为损失规避系数;
将x
其中,
累积权重函数的公式表示如下:
其中,σ为风险收益态度系数,δ为风险损失态度系数;k=P,B,N,分别表示执行不同操作。
累积前景价值的公式如下所示:
其中,V
进一步地,所述步骤(4)根据以下规则进行决策:
如果一个目标执行P决策产生的累积前景价值大于等于执行B决策和执行N决策的累积前景价值,那么对该目标执行P决策;如果一个目标执行B决策产生的累积前景价值大于等于执行P决策和执行N决策的累积前景价值,那么对该目标执行B决策;如果一个目标执行N决策产生的累积前景价值大于等于执行P决策和执行B决策的累积前景价值,那么对该目标执行N决策。
基于相同的发明构思,本发明提供的一种基于累积前景价值和三支决策的态势评估系统,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述计算机程序被加载至处理器时实现所述的基于累积前景价值和三支决策的态势评估方法。
有益效果:本发明在进行无人机态势评估时考虑了信息的不确定性,对目标进行三支决策,使得分类结果更加合理,有利于飞行员做出快速决策。同时,在决策过程中引入了累积前景价值,不同的无人机状态得到不同的目标信息,从而得到不同的参考点,可以反映出面对不同无人机态势时不同的决策偏好和风险态度,使决策结果更符合现实场景。
附图说明
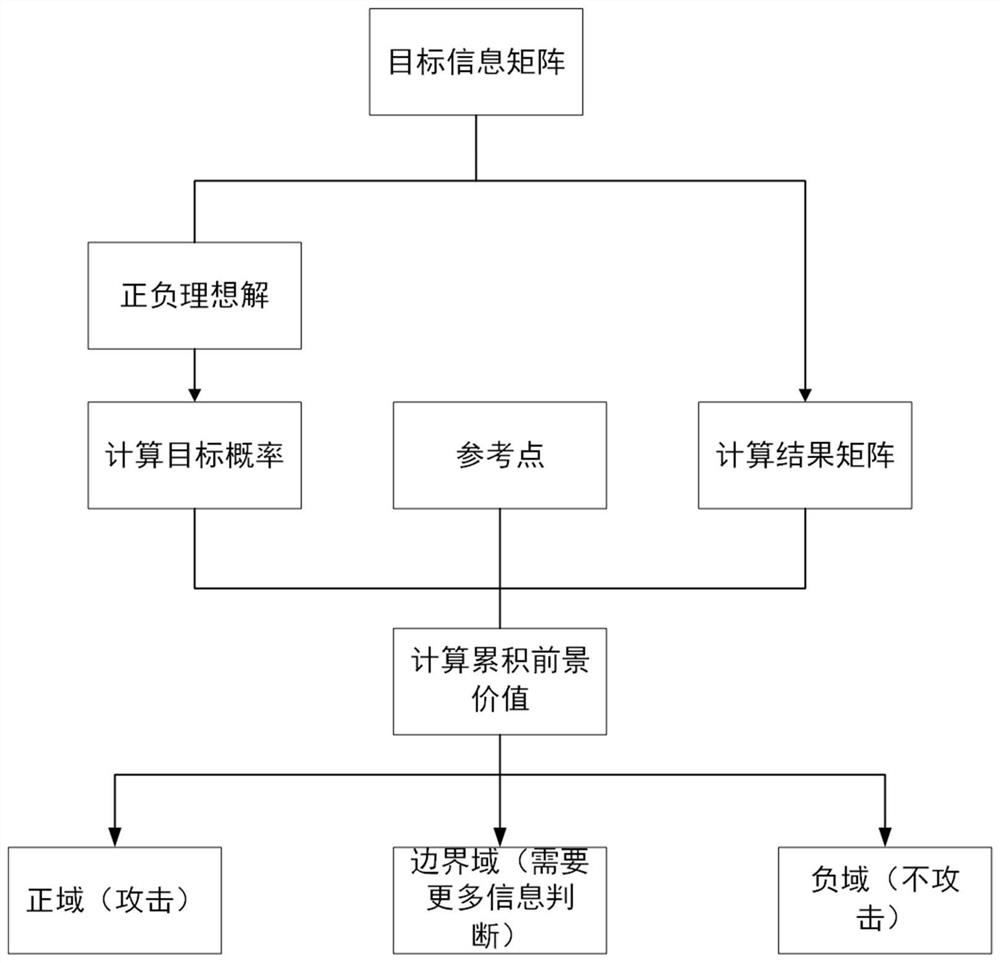
图1为本发明实施例的方法流程图。
具体实施方式
下面结合附图和具体实施例对本发明的具体实施方式进行详细描述。
如图1所示,本发明实施例公开了一种基于累积前景价值和三支决策的无人机态势评估方法,包括如下步骤:
步骤1:将无人机态势感知得到的目标信息进行规范化,得到规范化目标信息矩阵,构建决策理论中的状态集和行动集,
无人机在作战过程中,会接收到繁杂的信息,处理大量的信息耗时较长且无意义,因此在态势评估过程中,选取敌方无人机的空战能力信息和典型的空战信息进行判断。一般的态势评估体系中,选取无人机的机型、角度、速度和距离信息四个指标来进行评估。
首先无人机感知到的目标信息表示为X=(x
对于效益型指标:
对于成本型指标:
其中,max
根据规范化目标信息矩阵计算每个目标是否属于集合C的概率的具体步骤如下:
寻找每个指标的正负理想点,具体如下:
正理想解:
负理想解:
效益型指标的正负理想点:
成本型指标的正负理想点:
用熵值法计算指标权重w
(a)计算第i个目标在第j个指标下所占的比例:
(b)计算第j个指标的信息熵:
(c)计算第j个指标的权重:
计算每个目标的相对贴近度,即为每个目标属于集合C的概率,具体公式如下:
T
步骤2:根据目标信息矩阵计算累积前景价值理论中的参考点和每个目标的结果矩阵。
计算累积前景价值理论中的参考点,本发明中采用指标加权平均值来计算,具体公式如下:
计算累积前景价值理论中的结果矩阵,结果矩阵表示如下:
其中,x
因此,先计算损失函数矩阵,再转换为结果矩阵,其中x
首先计算三支决策中的损失函数矩阵,公式如下:
损失函数与结果矩阵间的数量关系如下:
x
由上述得到结果矩阵,具体公式如下:
每个数据的结果矩阵如下所示:
每个目标有n个指标,每个目标的多指标综合结果矩阵如下所示:
步骤3:根据上述得到的参考点,结果矩阵和概率计算每个目标采取执行、进一步研究和不执行动作的三个累积前景价值。
累积前景价值由累积权重函数和价值函数组成,具体公式如下:
其中,π
其中,价值函数的公式表示如下:
0<μ<1,0
将x
其中,
其中,累积权重函数的公式表示如下:
其中,σ为风险收益态度系数,δ为风险损失态度系数,0<σ<1,0<δ<1,本例中σ=0.61,δ=0.69。k=P,B,N,分别表示执行不同操作;i=1,2,···,m,表示第i个目标。如
因此,累积前景价值的公式如下所示:
其中,V
步骤4:对每个目标的三个累积前景价值进行比较,得到决策结果。
上述步骤3计算得到的三个值分别表示对目标T
伪代码表示如下:
(P)IfV
(B)IfV
(N)IfV
在本发明中,上述三种决策分别表示目标T
基于相同的发明构思,本发明实施例提供的一种基于累积前景价值和三支决策的态势评估系统,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,该计算机程序被加载至处理器时实现上述的基于累积前景价值和三支决策的态势评估方法。
- 一种基于累积前景价值和三支决策的态势评估方法与系统
- 一种基于三支决策的威胁评估方法