一种餐厅内自动送菜设备
文献发布时间:2023-06-19 11:47:31
技术领域
本发明属于输送设备技术领域,具体涉及一种餐厅内自动送菜设备。
背景技术
近年来,国内餐饮业迅速发展。为了向顾客提供一个更好的餐饮体验,餐厅不仅需要在餐厅环境,餐厅服务质量,餐厅菜品上下功夫,同时还需要注重餐厅的上菜效率。对于目前的餐厅送菜方式,基本是通过服务员送菜。这导致了餐厅送菜效率低下,餐厅送菜服务人员劳动强度大等情况。同时,类似汤类,火锅类,周围温度高,内部高温汤水容易在运送过程中溅出的菜品。以及像玻璃酒杯,玻璃装酒类饮品,陶瓷碗具等易碎类物品。在运送过程中,都非常对服务员造成伤害。为服务员以及餐厅带来意外的人身损失和财产损失。同时,传统送菜模式中,服务员也占用了地面空间,当餐厅客流量较大时,会给顾客的行动,带来不变,同时人流量的增加也导致了服务员送菜的不便。目前市面上,已经出现了一类可以替代服务员送菜的送菜机器人。该机器人的工作原理,就是将现实中的服务员直接使用人形机器人替代,需要运动的菜放置在机器人内部,机器人通过地面的导引线进行运送。这类设备虽然解决了传统送菜方式中的部分问题,但是依然存在问题即送菜机器人虽然替代了服务员,但是由于是在地面上运动,无法解决人流量大时,顾客行动受阻和自身送菜受阻这个问题。
发明内容
为解决现在技术存在的上述问题,本发明提供了一种可以减少餐厅人工成本,有效利用餐厅的顶部空间,大大节约餐厅地面面积,并且可以实现全自动送菜,方便快捷的餐厅内自动送菜设备。
本发明采用的技术方案是:
一种餐厅内自动送菜设备,其特征在于:包括布置在餐厅天花板上的导轨、能沿导轨送菜至相应餐桌的吊顶式送菜机;
所述吊顶式送菜机包括运动悬挂机构、升降机构、主体承载板、底部舱门、机壳、菜肴保温仓、餐盘夹具机构,所述运动悬挂机构能沿导轨移动的连接于导轨上,所述升降机构固定在运动悬挂机构上,所述升降机构的底部安装有由其带动升降并能相对升降机构旋转的主体承载板,所述主体承载板上开设有若干个出餐口,所述主体承载板的下方安装有能与其联动也能相对其转动的底部舱门,每个出餐口上均设置有菜肴保温仓,所述菜肴保温仓内安装有能升降的餐盘夹具机构,所述升降机构外固定安装有机壳,所述机壳罩设在主体承载板上。
进一步,所述运动悬挂机构包括悬挂架、四个导向轮,所述导向轮能转动安装于悬挂架上并能与导轨啮合,所述导向轮通过第一传动机构与驱动其转动的第一驱动电机连接,所述第一传动机构和第一驱动电机均固定在悬挂架上,所述升降机构固定在悬挂架的底部。
进一步,所述升降机构包括圆柱形支撑桶,所述圆柱形支撑桶的顶部安装有用于与运动悬挂机构连接的顶部盖板,所述圆柱形支撑桶的内部安装有第二驱动电机以及由第二驱动电机驱动升降的第二传动机构,所述第二传动机构与主体承载板连接。
进一步,所述主体承载板的中部安装有机体-底部舱门旋转机构,所述机体-底部舱门旋转机构包括用于驱动主体承载板和底部舱门同步转动的第三驱动电机、单独驱动底部舱门转动的第四驱动电机。
进一步,所述第三驱动电机通过内啮合齿轮驱动主体承载板旋转,所述第四驱动电机通过涡轮蜗杆机构驱动底部舱门旋转。
进一步,所述机体-底部舱门旋转机构固定安装在圆柱形支撑桶内并与第二传动机构连接。
进一步,所述菜肴保温仓的底部和侧面均设置有开口。底部的开口是出餐口,但同时也可以作为自动放餐口,让设备自动从该口夹取餐品放入设备内部,侧面的开口则是手动放餐口。
进一步,所述餐盘夹具机构是三爪式结构或是托盘式结构。
进一步,所述餐盘夹具机构由夹具升降机构带动升降,所述夹具升降机构安装于主体承载板上,其包括第五驱动电机、由第五驱动器驱动收放线的卷线器,所述卷线器的收放线外端与餐盘夹具机构的顶部连接。
进一步,所述吊顶式送菜机还包括光电识别控制机构,所述第一驱动电机、第二驱动电机、第三驱动电机、第四驱动电机、第五驱动电机均与光电识别控制机构电性连接。
本发明的有益效果:不影响地面人员流动、输送快捷方便,适合应用于厨房和餐厅在同一楼层的餐厅。可以减少餐厅人工成本,有效利用餐厅的顶部空间,大大节约餐厅地面面积,并且可以实现全自动送菜,方便快捷。
附图说明
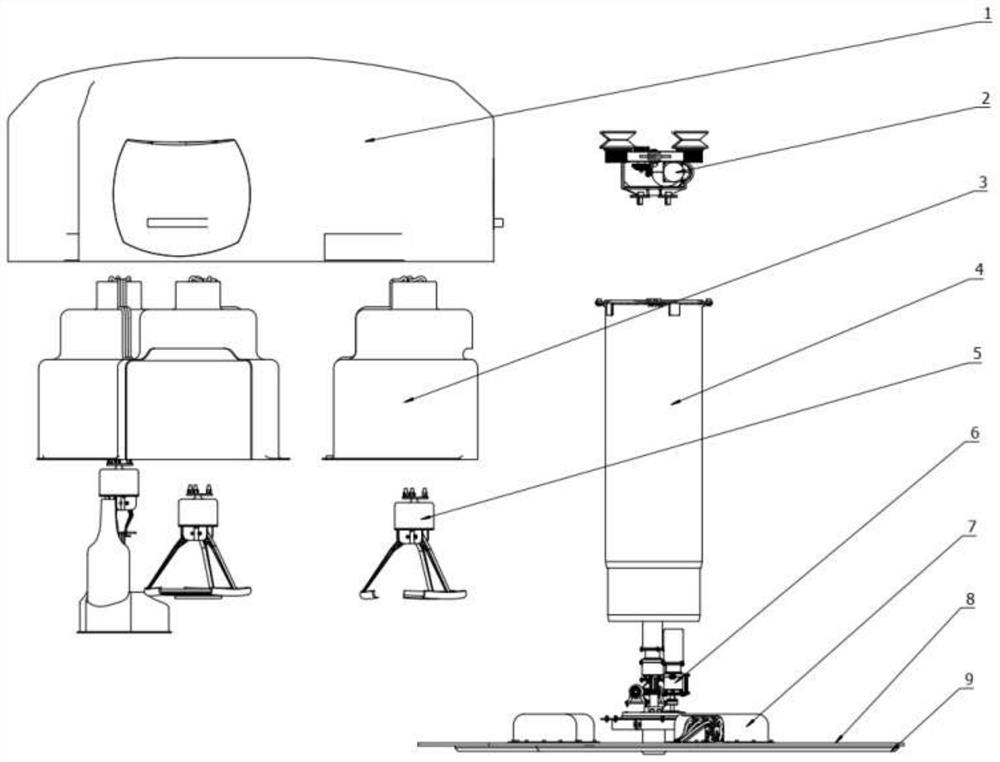
图1是本发明的整体结构示意图。
图2是本发明的爆炸结构示意图。
图3是本发明的运动悬挂机构的结构示意图。
图4是本发明的升降机构的外表面结构示意图。
图5是本发明的升降机构的内部结构示意图。
图6是本发明的机体-底部舱门旋转机构的结构示意图。
图7是本发明的菜肴保温仓的结构示意图。
图8是本发明的餐盘夹具机构的结构示意图。
图9是本发明的去除机壳后的部分结构示意图。
图中:1.机壳;2.运动悬挂机构;21.导向轮;22.悬挂架;3.菜肴保温仓;4.升降机构;41.圆柱形支撑桶;42.顶部盖板;5.餐盘夹具机构;6.机体-底部舱门旋转机构;61.第三驱动电机;62.第四驱动电机;63.内啮合齿轮;64.涡轮蜗杆机构;7.夹具升降机构;71.第五驱动电机;72.卷线器;8.主体承载板;81.出餐口;9.底部舱门。
具体实施方式
下面结合具体实施例来对本发明进行进一步说明,但并不将本发明局限于这些具体实施方式。本领域技术人员应该认识到,本发明涵盖了权利要求书范围内所可能包括的所有备选方案、改进方案和等效方案。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上,除非另有明确的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
参见图1-9,本实施例提供了一种餐厅内自动送菜设备,包括导轨部分和吊顶式送菜机。
本实施例所述导轨部分安装在餐厅的天花板。导轨从厨房出发,进入餐厅后,餐厅内每一列餐桌顶部的天花板上,都安装有导轨,吊顶式送菜机均安装于导轨之上,按照程序指定要求在导轨上移动。
本实施例所述吊顶式送菜机是用于送菜的主要设备,吊顶式送菜机通过其运动悬挂机构2与天花板上的导轨相连实现吊顶式送菜机在导轨上的运动。吊顶式送菜机可以自动将菜收入菜肴保温仓3内部,也可以手动将菜放入菜肴保温仓3内部。同时吊顶式送菜机也可以实现空盘回收。
本实施例所述吊顶式送菜机包括运动悬挂机构2、升降机构4、主体承载板8、底部舱门9、机壳1、菜肴保温仓3、餐盘夹具机构5,所述运动悬挂机构2能沿导轨移动的连接于导轨上,所述升降机构4固定在运动悬挂机构2上,所述升降机构4的底部安装有由其带动升降并能相对升降机构4旋转的主体承载板8,所述主体承载板8上开设有若干个出餐口81,所述主体承载板8的下方安装有能与其联动也能相对其转动的底部舱门9,每个出餐口81上均设置有菜肴保温仓3,所述菜肴保温仓3内安装有能升降的餐盘夹具机构5,所述升降机构4外固定安装有机壳1,所述机壳1罩设在主体承载板8上。
本实施例所述运动悬挂机构2包括悬挂架22、四个导向轮21,所述导向轮21能转动安装于悬挂架22上并能与导轨啮合,所述导向轮21通过第一传动机构(图中未标注)与驱动其转动的第一驱动电机(图中未标注)连接,所述第一传动机构和第一驱动电机均固定在悬挂架22上,所述升降机构4固定在悬挂架22的底部。本发明可以通过第一驱动电机驱动导向轮21实现在轨运动。
本实施例所述升降机构4包括圆柱形支撑桶41,所述圆柱形支撑桶41的顶部安装有用于与运动悬挂机构2连接的顶部盖板42,所述圆柱形支撑桶41的内部安装有第二驱动电机(图中未标注)以及由第二驱动电机驱动升降的第二传动机构(图中未标注),所述第二传动机构与主体承载板8连接。所述圆柱形支撑桶41内部有一块配重块(图中未标注),用于平衡整个吊顶式送菜机的重量。
本实施例所述主体承载板8的中部安装有机体-底部舱门旋转机构6,所述机体-底部舱门旋转机构6包括用于驱动主体承载板8和底部舱门9同步转动的第三驱动电机61、单独驱动底部舱门9转动的第四驱动电机62。所述第三驱动电机61通过内啮合齿轮63驱动主体承载板8旋转,所述第四驱动电机62通过涡轮蜗杆机构64驱动底部舱门9旋转。所述机体-底部舱门旋转机构6固定安装在圆柱形支撑桶41内并与第二传动机构连接。第三驱动电机61驱动主体承载板8旋转时会驱动底部舱门9一起旋转,其旋转的作用,主要是用于调整出餐口的位置。当调整好出餐口位置后,第四驱动电机62驱动底部舱门9单独旋转打开,即可开始出餐。
本实施例所述菜肴保温仓3的底部和侧面均设置有开口。底部的开口是出餐口,但同时也可以作为自动放餐口,让设备自动从该口夹取餐品放入设备内部,侧面的开口则是手动放餐口。本实施例总共有三个菜肴保温仓3,均等分布在主体承载板8上。
本实施例所述餐盘夹具机构5放置于菜肴保温仓3内部,可以是三爪式结构或是托盘式结构,通过更换不同的夹爪可以实现不同的餐具类型的夹取。
本实施例所述餐盘夹具机构5由夹具升降机构7带动升降,所述夹具升降机构7安装于主体承载板8上,其包括第五驱动电机71、由第五驱动器71驱动收放线的卷线器72,所述卷线器72的收放线外端与餐盘夹具机构5的顶部连接。
本实施例所述吊顶式送菜机还包括光电识别控制机构,所述第一驱动电机、第二驱动电机、第三驱动电机、第四驱动电机、第五驱动电机均与光电识别控制机构电性连接。所述光电识别控制机安装于吊顶式送菜机底部,用于向其内部控制系统传送信号,从而实现吊顶式送菜机的自动化送菜功能。
本发明的工作流程如下:首先,吊顶式送菜机位于厨房内部,等待顾客发出点餐信号。顾客使用平板电脑进行点餐,下单完成后,数据传送到厨房,厨师根据顾客的点餐信息准备相关菜肴,菜肴准备完成后,可以由厨师手动将菜肴从自动送菜设备的侧面放餐口放入,也可以将菜肴放置于吊顶式送菜机底部,令其自动夹取菜肴。菜肴放入完毕之后,厨师通过平板选择放入了菜肴的吊顶式送菜机完成对应的订单,并点击发送,然后吊顶式送菜机将从厨房出发,到达点菜的顾客上方,打开底部舱门,将菜肴放置于顾客桌面上,如有空盘,则在放置完菜肴之后,自动回收空盘,完成之后自动放回厨房,等待下一次运菜任务。本发明可以减少餐厅人工成本,有效利用餐厅的顶部空间,大大节约餐厅地面面积,并且可以实现全自动送菜,方便快捷。
- 一种餐厅内自动送菜设备
- 一种餐厅自动化存菜上菜设备