一种基于激光雷达的出入口匝道实时风险预警系统及方法
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及交通安全风险监测技术领域,尤其是涉及一种基于激光雷达的出入口匝道实时风险预警系统及方法。
背景技术
高速公路匝道是路网中的重要的节点,承担着车流的集散的任务,发挥着关键纽带的作用,高速公路的出入口匝道处的车流往往车速变化较大,车流状态不稳定,在既有匝道处,交通事故难以得到有效的控制。针对这一问题,现有的出入口匝道风险预警往往是基于线圈采集断面流量等数据以进行分析,但这种方法存在着数据缺失的问题,由于缺失车辆的实际位置关系、车辆运行状态的信息,也就难以准确判断车辆之间可能存在的交互风险。
目前也有一些通过其他传感器如摄影机采集目标车道上的车辆信息(如前车与后车的距离,速度等),从而确定风险等级。尽管能够采集获取大量的数据进行分析,但是这些方法往往受制于所分析的匝道口的特殊性,一方明难以解决不同的出入口匝道的问题,并且处理效率不高;另一方面也不能有效地分析其它数据,如目标车道的其他车辆的数据,以及驾驶车辆的连续数据等。
近年来,从视频或雷达中提取轨迹数据的技术逐渐成熟,并在部分研究领域得到了运用,如交叉口车辆的驾驶行为,评估交叉口的安全性等。轨迹数据提供了车辆的详细定位和速度信息,可以更好的帮助解释驾驶行为,是客观分析这类问题的关键条件。部分研究通过轨迹数据对匝道口安全状况进行分析评估,然而还是存在一些不足;轨迹数据的获取往往通过视频或雷达,视频是基于二维图像分析,由于倾角和地图匹配问题难于对远端的车辆轨迹准确捕捉,以及受光线明暗程度、能见度影响较大,难以做到24小时全天候,而对于毫米波雷达,其由于检测过程中的杂音干扰,对匝道出入口这类复杂的交通流场景,难以实现准确的检测。由于这些检测技术的局限性,以往的工作所采集的轨迹数据往往需要经过后处理进行线下分析,难以做到实时的风险预测预警,从而导致了相关的应急处置效率滞后。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于激光雷达的出入口匝道实时风险预警系统及方法,以提高出入口匝道风险预警的实时性。
本发明的目的可以通过以下技术方案来实现:一种基于激光雷达的出入口匝道实时风险预警系统,包括依次连接的数据采集模块、数据分析模块和风险预警模块,所述数据采集模块包括依次连接的激光雷达和轨迹处理单元,所述激光雷达安装于出入口匝道位置,用于检测匝道上车辆与目标车道上车辆的点云数据;
所述轨迹处理单元根据激光雷达检测的点云数据,以分析得到匝道上车辆以及目标车道上车辆的轨迹数据;
所述数据分析模块用于根据历史轨迹数据,构建风险等级分类指标;以及根据实时轨迹数据和风险等级分类指标,分析得到当前风险等级;
所述风险预警模块用于发布当前风险预警信息以及判断是否需进行交通调度。
进一步地,所述风险预警模块分别与匝道上车辆的车载移动设备以及后台交通控制中心通信连接。
进一步地,所述数据分析模块包括用于存储历史轨迹数据的数据池。
进一步地,所述轨迹处理单元具体为边缘计算盒。
一种基于激光雷达的出入口匝道实时风险预警方法,包括以下步骤:
S1、数据采集模块采集匝道上车辆与目标车道上车辆之间的历史点云数据,并分析得到匝道上车辆以及目标车道上车辆的历史轨迹数据;
S2、数据采集模块将匝道上车辆以及目标车道上车辆的历史轨迹数据输出给数据分析模块,数据分析模块根据历史轨迹数据,依次分析得到冲突点以及冲突点的TTC(Time-To-Collision,碰撞时间)值,通过对冲突点的TTC值进行聚类,构建得到风险等级分类指标;
S3、数据采集模块采集当前匝道上车辆与目标车道上车辆的实时点云数据,并分析得到匝道上车辆以及目标车道上车辆的实时轨迹数据;
S4、数据采集模块将匝道上车辆以及目标车道上车辆的实时轨迹数据输出给数据分析模块,数据分析模块根据实时轨迹数据,依次分析得到实时冲突点以及实时冲突点的TTC值,结合风险等级分类指标,确定出实时风险等级,并将实时风险等级信息输出给风险预警模块;
S5、风险预警模块根据实时风险等级信息,发布对应的预警信息给当前交通参与者,并判断当前是否需进行交通调度,若判断为是,则输出调度请求信息给后台交通控制中心,若判断为否,则不输出调度请求信息给后台交通控制中心。
进一步地,所述轨迹数据包括车辆的ID、车辆速度、车辆加速度以及车辆位置坐标。
进一步地,所述步骤S2具体包括以下步骤:
S21、数据采集模块将匝道上车辆以及目标车道上车辆的历史轨迹数据输出给数据分析模块;
S22、数据分析模块根据历史轨迹数据,得到匝道上车辆与目标车道上车辆之间轨迹的不同交点,即得到多个冲突点;
S23、数据分析模块分析得到多个冲突点对应的TTC值,若冲突点的TTC值满足预设的条件,则判定该冲突点将会发生冲突事件,否则判定该冲突点不会发生冲突事件、忽略该冲突点;
S24、统计得到单位时间内的冲突事件密度,采用深度学习算法,对冲突事件密度进行聚类分级,构建得到风险等级分类指标。
进一步地,所述步骤S23中判定是否发生冲突事件的具体过程为:
S231、若在冲突点的预设距离范围以内,TTC值小于或等于时间阈值,则判定该冲突点将会发生冲突事件,否则执行步骤S232;
S232、若TTC值在单位时间内的变化量大于或等于变化阈值,则判定该冲突点将会发生冲突事件,否则判定该冲突点不会发生冲突事件、忽略该冲突点。
进一步地,所述风险等级分类指标包括低风险类别及对应的冲突事件密度数据范围、中低风险类别及对应的冲突事件密度数据范围、中风险类别及对应的冲突事件密度数据范围、中高风险类别及对应的冲突事件密度数据范围、高风险类别及对应的冲突事件密度数据范围。
进一步地,所述步骤S4具体包括以下步骤:
S41、数据采集模块将匝道上车辆以及目标车道上车辆的实时轨迹数据输出给数据分析模块;
S42、数据分析模块根据实时轨迹数据,得到当前匝道上车辆与目标车道上车辆之间轨迹的不同交点,即得到多个实时冲突点;
S43、数据分析模块分析得到多个实时冲突点对应的TTC值,若实时冲突点的TTC值满足预设的条件,则判定该实时冲突点将会发生冲突事件,否则判定该实时冲突点不会发生冲突事件、忽略该冲突点;
S44、统计得到单位时间内的实时冲突事件密度,结合风险等级分类指标,判断实时冲突事件密度所属的冲突事件密度范围,从而确定出当前的实时风险等级;
S45、数据分析模块将当前的实时风险等级信息输出给风险预警模块。
进一步地,所述步骤S5中判断是否需进行交通调度的具体过程为:若当前的实时风险等级为中风险、中高风险或高风险,则判断为需要进行交通调度,否则判断为不需要进行交通调度。
与现有技术相比,本发明具有以下优点:
一、本发明通过设置依次连接的数据采集模块、数据分析模块和风险预警模块,;利用数据采集模块中的激光雷达,能够实时准确获取匝道上以及目标车道上车辆的点云数据,结合数据采集模块中的轨迹处理单元,能够实时准确得到匝道上以及目标车道上车辆的轨迹数据,通过积累历史轨迹数据,利用数据分析模块构建风险等级分类指标,从而在实时获取匝道上以及目标车道上车辆的点云数据后,能够快速、准确地得到当前的实时风险等级,结合风险预警模块,实现有效提高出入口匝道风险预警实时性的目的。
二、本发明在构建风险等级分类指标时,首先基于匝道上车辆和目标车道上车辆的轨迹数据,以得到冲突点,之后根据冲突点的TTC值,结合设置的冲突事件判定条件,通过统计单位时间内的冲突事件密度,以此作为风险等级分类指标的数据范围基础,保证了后续风险等级分类的准确性,使得构建的风险等级分类指标能够适应不同的匝道交通环境。
附图说明
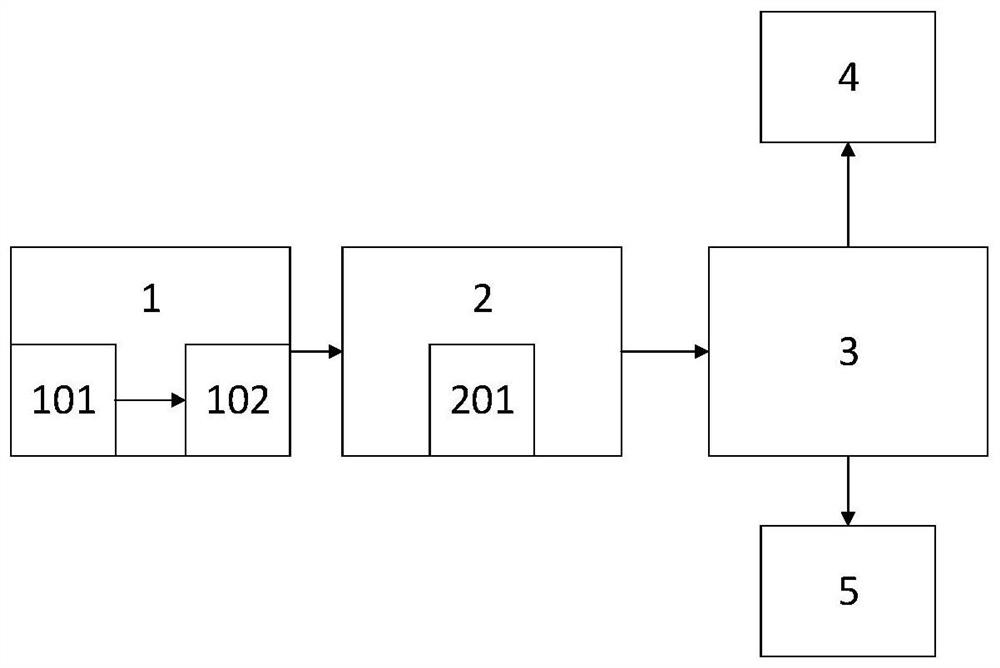
图1为本发明的系统结构示意图;
图2为本发明的方法流程示意图;
图3为实施例中系统架构示意图;
图4为实施例中应用流程示意图;
图5为实施例中应用场景示意图;
图中标记说明:
1、数据采集模块,101、激光雷达,102、轨迹处理单元,2、数据分析模块,201、数据池,3、风险预警模块,4、车载移动设备,5、后台交通控制中心。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。
实施例
如图1所示,一种基于激光雷达的出入口匝道实时风险预警系统,包括依次连接的数据采集模块1、数据分析模块2和风险预警模块3,数据采集模块1包括依次连接的激光雷达101和轨迹处理单元102,激光雷达101安装于出入口匝道位置,用于检测匝道上车辆与目标车道上车辆的点云数据;
轨迹处理单元102根据激光雷达101检测的点云数据,以分析得到匝道上车辆以及目标车道上车辆的轨迹数据;
数据分析模块2用于根据历史轨迹数据,构建风险等级分类指标,数据分析模块2包括用于存储历史轨迹数据的数据池201;以及根据实时轨迹数据和风险等级分类指标,分析得到当前风险等级;
风险预警模块3用于发布当前风险预警信息以及判断是否需进行交通调度,在实际应用中,风险预警模块3分别与匝道上车辆的车载移动设备4以及后台交通控制中心5通信连接,以将当前风险预警信息发送给当前的交通参与方、将交通调度请求相关信息发送给后台交通控制中心5。
将上述系统应用于实际,其具体的出入口匝道实时风险预警方法如图2所示,包括以下步骤:
S1、数据采集模块采集匝道上车辆与目标车道上车辆之间的历史点云数据,并分析得到匝道上车辆以及目标车道上车辆的历史轨迹数据,其中,轨迹数据包括车辆的ID、车辆速度、车辆加速度以及车辆位置坐标;
S2、数据采集模块将匝道上车辆以及目标车道上车辆的历史轨迹数据输出给数据分析模块,数据分析模块根据历史轨迹数据,依次分析得到冲突点以及冲突点的TTC值,通过对冲突点的TTC值进行聚类,构建得到风险等级分类指标,具体的:
S21、数据采集模块将匝道上车辆以及目标车道上车辆的历史轨迹数据输出给数据分析模块;
S22、数据分析模块根据历史轨迹数据,得到匝道上车辆与目标车道上车辆之间轨迹的不同交点,即得到多个冲突点;
S23、数据分析模块分析得到多个冲突点对应的TTC值,若冲突点的TTC值满足预设的条件,则判定该冲突点将会发生冲突事件,否则判定该冲突点不会发生冲突事件、忽略该冲突点,在具体判定是否发生冲突事件时,若在冲突点的预设距离范围以内,TTC值小于或等于时间阈值,则判定该冲突点将会发生冲突事件,否则继续判断TTC值在单位时间内的变化量是否大于或等于变化阈值,若判断为是,则判定该冲突点将会发生冲突事件,否则判定该冲突点不会发生冲突事件、忽略该冲突点;
S24、统计得到单位时间内的冲突事件密度,采用深度学习算法,对冲突事件密度进行聚类分级,构建得到风险等级分类指标,其中,风险等级分类指标包括低风险类别及对应的冲突事件密度数据范围、中低风险类别及对应的冲突事件密度数据范围、中风险类别及对应的冲突事件密度数据范围、中高风险类别及对应的冲突事件密度数据范围、高风险类别及对应的冲突事件密度数据范围;
S3、数据采集模块采集当前匝道上车辆与目标车道上车辆的实时点云数据,并分析得到匝道上车辆以及目标车道上车辆的实时轨迹数据;
S4、数据采集模块将匝道上车辆以及目标车道上车辆的实时轨迹数据输出给数据分析模块,数据分析模块根据实时轨迹数据,依次分析得到实时冲突点以及实时冲突点的TTC值,结合风险等级分类指标,确定出实时风险等级,并将实时风险等级信息输出给风险预警模块,具体的:
S41、数据采集模块将匝道上车辆以及目标车道上车辆的实时轨迹数据输出给数据分析模块;
S42、数据分析模块根据实时轨迹数据,得到当前匝道上车辆与目标车道上车辆之间轨迹的不同交点,即得到多个实时冲突点;
S43、数据分析模块分析得到多个实时冲突点对应的TTC值,若实时冲突点的TTC值满足预设的条件,则判定该实时冲突点将会发生冲突事件,否则判定该实时冲突点不会发生冲突事件、忽略该冲突点;
S44、统计得到单位时间内的实时冲突事件密度,结合风险等级分类指标,判断实时冲突事件密度所属的冲突事件密度范围,从而确定出当前的实时风险等级;
S45、数据分析模块将当前的实时风险等级信息输出给风险预警模块;
S5、风险预警模块根据实时风险等级信息,发布对应的预警信息给当前交通参与者,并判断当前是否需进行交通调度,若当前的实时风险等级为中风险、中高风险或高风险,则判断为需要进行交通调度,输出调度请求信息给后台交通控制中心;若判断为否,则不需要进行交通调度,不输出调度请求信息给后台交通控制中心。
本实施例中,轨迹处理单元选用边缘计算盒,如图3所示,激光雷达采集的数据输出给边缘计算盒进行轨迹处理,实时平台用以构建风险等级分类指标以及进行实时风险判断,最后将当前的实时风险等级信息进行发布。
本实施例应用上述系统及方法,其具体的应用过程如图4所示:
步骤1:利用在城市快速路或高速公路出入口匝道处安装的激光雷达,感知目标车道以及即将进入目标的车辆的轨迹数据。
激光雷达的安装位置可见图5中实施例的使用场景,可安装在匝道与主线的夹角当中,需要保证一定的安装高度,需要避免绿植、标志牌的遮挡。随后激光雷达对检测范围内的车辆进行检测感知,由边缘计算盒对所获得的激光雷达点云数据进行轨迹处理,并存储在轨迹数据池中,这一过程由系统的数据采集模块完成。
步骤2:对采集到的激光雷达轨迹数据,按照不同的冲突点的TTC值,通过深度学习,以聚类分为低风险,中低风险,中风险,中高风险和高风险共5类。
具体的,冲突点由道路几何条件以及车辆运行轨迹决定,匝道上同一车辆与主线目标车道上不同车辆之间存在不同的冲突点,比如,在有车辆进入匝道时,若目标车道上存在与其存在冲突可能的车辆,则由数据采集模块确定两者的轨迹数据,在可能发生冲突点的位置,由数据分析模块判定其TTC值,在车辆运行过程中这个值也会不断变化,将满足距冲突点一定距离内TTC值小于预设时间阈值、或者单位时间内TTC值变化大于设定变化阈值的事件判定为冲突事件。由此对单位时间内,匝道内的全部车辆与目标车道上车辆运行状态进行分析,得到单位时间内的冲突事件密度,将冲突事件密度进行聚类分级,以分别得到前述的五个风险等级,即构建得到风险等级分类指标,这一功能通过数据分析模块完成。
在实际应用中,由于系统存在冷启动的问题,对于一个全新的匝道口,存在着没有当前路口基础数据池的问题,可以采用基于类似出入口匝道的历史轨迹数据池进行初始定义,并在实时的轨迹数据进入数据池后进行调整,从而达到对不同的出入口匝道的泛化能力的提高,保证实施效果。
步骤3:对于激光雷达实时采集的轨迹数据,由数据分析模块进行实时分析后,得到实时的冲突点TTC值以及实时冲突事件密度,结合风险等级分类指标,即可进行分类预测,即实现实时准确的风险预警。
具体的,如对于入口匝道而言,在主线交通量较小时,匝道上的车辆汇入与目标车道车辆冲突较小,实时的TTC值分类处于中低风险,此时,系统通过实时轨迹数据分析,对交通参与者给出提醒,从而完成车辆汇入过程;
在主线交通量适中时,匝道上的车辆汇入与目标车道车辆冲突适中,实时的TTC值可能存在一定的波动,系统则及时地给出预警,保证安全的完成车辆汇入过程;
在主线交通量较大时,目标车道的车流量较大,匝道车辆汇入风险较大,则可以通过后台交通控制中心实时发布交通信息,对交通参与人员进行调度,合理的进入匝道,或者采用其他的路线方式进行规避;
对于出口匝道也是同理,对不同主线交通量,存在着不同的预警方式。
步骤3的功能通过系统的风险预警模块完成。
步骤4:对风险预警模块的信息,判断信息发布的内容,以及可能需要进行的交通调度。
具体的发布方式为,对于普通驾驶车辆中,利用小程序或导航系统发布预警信息,在未来也可以适用于无人车、网联车等的实时数据共享。信息的发布与共享能达到辅助决策的作用,减小出入口匝道处的安全隐患,减少事故的发生。
综上所述,本发明基于激光雷达采集的点云数据,处理得到包含实时的出入口匝道的车辆轨迹以及目标车道轨迹数据;在检测积累一定的历史数据后,利用深度学习方法进行风险分级,并对实时轨迹进行风险分析,及时地做出预警,将信息及时发布给交通参与方(包括匝道以及目标车道车辆),由此实现实时预警,以及进行交通调度。本发明能够用于改善城市快速路或者高速公路出入口匝道处由于车速变化大,车流不稳定,容易产生交通事故的问题,本发明还改善了传统方法中数据缺失、分析不全面、不能全天候监管等问题,具有可迁移性强、实用性强、鲁棒性较好的优点。
- 一种基于激光雷达的出入口匝道实时风险预警系统及方法
- 基于动态博弈的自动驾驶车辆出入口匝道行驶决策方法