一种基于无人机激光雷达的输电通道树障预警方法
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及无人机巡线技术领域,具体是一种基于无人机激光雷达的输电通道树障预警方法。
背景技术
激光雷达,是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而被运用到巡线作业中对障碍物进行探测和识别。
现有的无人机巡线过程中,经常会受到树木丛的干扰,不仅会对巡线无人机造成危险,还会干扰对线缆的图像拍摄。
发明内容
有鉴于此,本发明的目的是提供一种基于无人机激光雷达的输电通道树障预警方法,能够在巡线过程中对无人机航线中的树障进行预警,同时能够帮助巡线无人机拍摄被树障遮挡住的部分线缆。
本发明的一种基于无人机激光雷达的输电通道树障预警方法,包括步骤:
利用巡线无人机获取线缆参数,根据数线缆参数和悬链方程建立线缆的曲线模型,根据曲线模型制成航线,航线位于曲线模型的正上方且与曲线模型平行;
利用巡线无人机沿线缆进行巡线,巡线无人机底部的摄像头拍摄光学图像,巡线无人机底部的激光雷达向前下方发送激光信号,并根据回波信号判断巡线无人机前下方的线缆的高度;
将不断获取的巡线无人机前下方的线缆高度建立模型,并与曲线模型进行对比,根据对比结果判断线缆周围是否存在树障;
如果判断存在树障,巡线无人机飞至该点时调整航线,越过树障部分,同时,巡线无人机围绕树障部分,并调转激光雷达,向树障发送激光信号,如果通过回波检测到与曲线模型位置一致的线缆,则调转摄像头拍摄光学图像;
越过树障部分的巡线无人机返回航线,继续巡线直至航线结束。
进一步,所述曲线模型的需要的参数为弧垂和电缆两端悬挂点的高度,电缆悬挂点高度通过巡线无人机直接测得,弧垂的计算公式为:
其中,l为档距,f为弧垂,h为两根电杆之间的高度差,θ为观测角度,a为悬挂点到激光雷达的垂直距离,α为高差角度;
上述公式得到最大弧垂f1和最小弧垂f2,带入至悬链线方程中:
a’为常数。
进一步,所述巡线无人机的底部设有正向下方的距离传感器,距离传感器与所述巡线无人机的飞控系统连接,所述巡线无人机在航线上航行或者越过树障航行时,距离传感器用于使得巡线无人机与线缆或者树障面保持特定距离。
进一步,所述激光雷达测量的线缆高度与所述曲线模型中对应点的高度相差不超过±3%时,该线缆段视为无障碍物,巡线无人机飞跃该部分时,按照预定航线航行,否则,按照测量高度再加上特定高度的飞行高度越过该段。
进一步,所述激光雷达安装在所述巡线无人机的底部的前方,并朝正下方45°设置。
本发明的有益效果是:本发明的一种基于无人机激光雷达的输电通道树障预警方法,通过对电缆建立悬链曲线模型,使得巡线无人机沿着航线飞行,同时对下前方电缆的高度进行检测,当高度与计算结果相差较大时,进行树障预警并绕飞,同时在绕飞时利用激光雷达向树障处发射雷达信号,回波测量高度与曲线模型一致时,证明能够透过缝隙到达线缆处,此时利用光学镜头获得光学图像,完成树障处的巡线;本发明可以使得巡线无人机有效规避架空线缆的树障,同时尽可能完成对树障内线缆的巡线。
附图说明
为了更清楚地说明本申请实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它相关的附图:
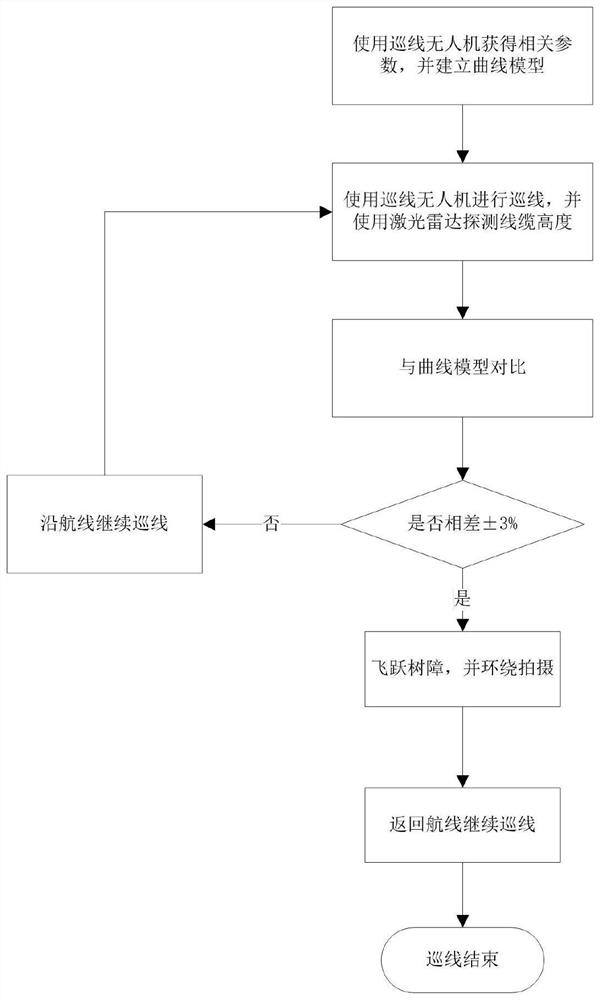
图1为本发明的流程示意图。
具体实施方式
为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本申请实施例的组件可以以各种不同的配置来布置和设计。
因此,以下对在附图中提供的本申请的实施例的详细描述并非旨在限制要求保护的本申请的范围,而是仅仅表示本申请的选定实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
如图1所示:本实施例的一种基于无人机激光雷达的输电通道树障预警方法,包括步骤:
利用巡线无人机获取线缆参数,根据数线缆参数和悬链方程建立线缆的曲线模型,需要巡线无人机采集的参数有电缆两端的悬挂点的高度差h和档距L(即悬挂点之间的水平距离),均可利用巡线无人机上的激光雷达、海拔高度传感器等测量仪器进行测量,根据曲线模型制成航线,航线位于曲线模型的正上方且与曲线模型平行,即巡线无人机以恒定高度飞行在电缆的正上方;
利用巡线无人机沿线缆进行巡线,巡线无人机底部的摄像头拍摄光学图像,巡线无人机底部的激光雷达向前下方发送激光信号,并根据回波信号判断巡线无人机前下方的线缆的高度,无人机自身高度通过海拔高度传感器器测得,是已知的,通过回波测量无人机与线缆对应点之间的距离,通过激光信号的角度一致,因此可以通过三角函数算出无人机与测量点之间的高度差和水平距离,对应到曲线模型中,即可与模型数据进行对比;
将不断获取的巡线无人机前下方的线缆高度建立模型,并与曲线模型进行对比,根据对比结果判断线缆周围是否存在树障;
如果判断存在树障,巡线无人机飞至该点时调整航线,越过树障部分,同时,巡线无人机围绕树障部分,并调转激光雷达,向树障发送激光信号,如果通过回波检测到与曲线模型位置一致的线缆,则调转摄像头拍摄光学图像;
越过树障部分的巡线无人机返回航线,继续巡线直至航线结束。
本实施例中,所述曲线模型的需要的参数为弧垂和电缆两端悬挂点的高度,电缆悬挂点高度通过巡线无人机直接测得,弧垂的计算公式为:
其中,l为档距,f为弧垂,h为两根电杆之间的高度差,θ为观测角度,a为悬挂点到激光雷达的垂直距离,α为高差角度;弧垂公式为现有技术,故不赘述;
上述公式得到最大弧垂f1和最小弧垂f2,带入至悬链线方程中:
a’为常数,常数a’=水平张力/线密度,可以通过查阅电缆敷设时的资料得到。
本实施例中,所述巡线无人机的底部设有正向下方的距离传感器,距离传感器与所述巡线无人机的飞控系统连接,所述巡线无人机在航线上航行或者越过树障航行时,距离传感器用于使得巡线无人机与线缆或者树障面保持特定距离。
本实施例中,所述激光雷达测量的线缆高度与所述曲线模型中对应点的高度相差不超过±3%时,该线缆段视为无障碍物,巡线无人机飞跃该部分时,按照预定航线航行,否则,按照测量高度再加上特定高度的飞行高度越过该段。
本实施例中,所述激光雷达安装在所述巡线无人机的底部的前方,并朝正下方45°设置,激光雷达与线缆之间的距离即为探测距离的1/2。
本发明的一种基于无人机激光雷达的输电通道树障预警方法,通过对电缆建立悬链曲线模型,使得巡线无人机沿着航线飞行,同时对下前方电缆的高度进行检测,当高度与计算结果相差较大时,进行树障预警并绕飞,同时在绕飞时利用激光雷达向树障处发射雷达信号,回波测量高度与曲线模型一致时,证明能够透过缝隙到达线缆处,此时利用光学镜头获得光学图像,完成树障处的巡线;本发明可以使得巡线无人机有效规避架空线缆的树障,同时尽可能完成对树障内线缆的巡线。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种基于无人机激光雷达的输电通道树障预警方法
- 基于人工智能技术的输电线路树障清理无人机