一种智能控制清理毛边的海绵切割机
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及智能制造装置技术领域,具体地说,涉及一种智能控制清理毛边的海绵切割机。
背景技术
海绵切割机分为手动海绵切割机和数控海绵切割机,手动海绵切割机价格便宜,但是对于海绵利用率比较低,而且操作复杂,数控海绵切割机价格适中,操作简便,一般会使用电脑的人就可以操控,能有效的提高海绵利用率,而且切割出来无粉尘;
目前的海绵切割机在切割结束后直接将海绵取下,需要另外使用检测仪对海绵切割处的毛边进行检测,对于毛边较长的位置,需要再次使用海绵切割机对边缘进行切割,这样来回搬运海绵,导致劳动强度大,不利于生产效率;
目前的海绵切割机常将切割龙门罩在传送机构顶部进行配合使用,将海绵放在传送机构顶部传送切割,由于传送机构的传送范围有限,导致传送机构输送海绵进行切割的范围有限,不能适用较长海绵的切割,在切割不同长度的海绵时,需要准备相适配的传送机构进行传送切割,导致生产成本增加,实用性欠缺,鉴于此,我们提出一种智能控制清理毛边的海绵切割机。
发明内容
本发明的目的在于提供一种智能控制清理毛边的海绵切割机,以解决上述背景技术中提出的切割范围有限和不能当时进行毛边检测的问题。
为实现上述目的,本发明提供一种智能控制清理毛边的海绵切割机,至少包括:
切割龙门,所述切割龙门包括两个对称的支撑架,所述支撑架底部固定连接有滑块,两个所述支撑架顶部之间固定连接有切割架,所述切割架顶部开设有开槽,所述开槽内部转动设有传送丝杆,所述传送丝杆端部连接有传送电机,所述传送丝杆外壁螺纹连接有传送板,所述传送板与所述开槽内部截面尺寸相适配,所述传送板底部固定连接有激光切割仪;
本发明中的切割龙门在具体使用时,可以将海绵放在激光切割仪正下方,然后使切割龙门在海绵外侧前后运动,由传送电机输出轴带动传送丝杆转动在开槽内部,传送板表面沿着传送丝杆外壁的螺纹滑动在开槽内部,水平调节切割的位置,同时激光切割仪输出端释放激光,利用激光高温产生能量对海绵进行切割。
滑轨,所述滑轨两端均铰接有延伸装置,所述延伸装置包括铰接轨,所述铰接轨一端通过转动板转动在所述滑轨端部,所述铰接轨设置有多个,两个所述铰接轨之间通过转动板铰接有延伸轨,所述滑轨、所述铰接轨和所述延伸轨顶部均连通开设有滑槽,所述滑槽与所述滑块呈“T”字状适配,所述滑块滑动在所述滑槽内部。
本发明中的滑轨在具体使用时,根据海绵切割的长度,调节延伸装置的水平长度,使滑块滑动在滑槽内部,带动支撑架和切割架前后运动,根据海绵切割的长度完整的切割海绵。
所述激光切割仪底部设有毛边检测仪,所述毛边检测仪用于检测海绵切割外侧的毛边。
所述毛边检测仪内部设有视觉定位模块、毛边识别模块和信息传输模块,所述视觉定位模块用于准确的定位海绵切割处毛边的位置,所述毛边识别模块用于利用机器视觉对图像进行处理、分析和理解、识别视觉定位模块定位位置的毛边信息,所述信息传输模块用于接收所述毛边识别模块识别的毛边信息传输给所述激光切割仪。
作为本技术方案的进一步改进,所述滑块底部开设有转槽,所述转槽内部转动设有两个对称的滚轮,所述滚轮外壁与所述滑槽内腔底部紧密贴合。
作为本技术方案的进一步改进,两个所述滚轮靠近端部的外壁均设有从动齿轮,两个所述从动齿轮外壁之间啮合有多个主动齿轮,多个主动齿轮外壁之间啮合连接,其中一个主动齿轮端部连接有制动电机,所述制动电机外壁固定在转槽内壁。
作为本技术方案的进一步改进,所述滑块两侧壁均开设有限位槽,所述限位槽内部等间距转动有多个滚筒,所述滚筒外壁与所述滑槽侧壁紧密贴合。
作为本技术方案的进一步改进,所述支撑架内部开设有空腔,所述空腔靠近端部的内壁设有分隔板,所述分隔板表面嵌设有多个引风扇,所述引风扇内部与所述空腔内部连通,所述空腔靠近外表面的端部铰接有铰接门。
作为本技术方案的进一步改进,所述分隔板和所述铰接门之间滑动设有刷板,所述刷板滑动在所述空腔内部,所述刷板外壁等间距设有多个清理毛刷,所述清理毛刷端部紧密贴合空腔内壁,所述刷板顶部固定连接有齿条,所述齿条外壁啮合有联动齿轮,所述联动齿轮转动在所述空腔内腔顶部,所述联动齿轮端部连接有移动电机输出轴。
作为本技术方案的进一步改进,所述支撑架两侧壁开设有与所述开槽内部连通的定位槽,所述传送板两侧壁均设有定位块,所述定位块与所述定位槽相适配。
作为本技术方案的进一步改进,所述传送板两侧壁开设有插槽,所述定位块滑动在所述插槽内部,所述定位块端部与所述插槽内腔端部之间固定连接有限位弹簧。
与现有技术相比,本发明的有益效果:
1、该智能控制清理毛边的海绵切割机中,通过将海绵放在切割龙门内部时,根据海绵切割的长度,调节延伸装置的水平长度,方便通过滑块滑动在滑槽内部,提高支撑架和切割架前后运动的范围,确保切割海绵更完整,适用性更强。
2、该智能控制清理毛边的海绵切割机中,通过两个滚轮在转槽内部朝相同方向转动,方便带动滑块自主的滑动在滑槽内部,操作方便,自动化程度高,方便更稳定的均匀切割海绵,并且减小滑块底部与滑槽内部的摩擦阻力,使滑块带动支撑架和切割架移动更轻松。
3、该智能控制清理毛边的海绵切割机中,通过将切割海绵过程中的灰尘从空腔内表面端部经过引风扇内部,吸入空腔与分隔板之间,从而可以避免切割过程中的灰尘漂浮不利于工作人员的生命健康,提高安全性。
4、该智能控制清理毛边的海绵切割机中,通过刷板在空腔内部滑动,带动多个清理毛刷端部贴合空腔内壁刷动,将空腔内壁附着的灰尘刷掉,打开铰接门,方便集中收集灰尘,节省劳动强度,方便清理。
5、该智能控制清理毛边的海绵切割机中,通过在传送板滑动在开槽内部,使定位块滑动在定位槽内部,可以使传送板沿着定位块移动的方向水平移动,确保带动激光切割仪移动更稳定。
6、该智能控制清理毛边的海绵切割机中,通过激光切割仪对海绵进行初步切割后,通过毛边检测仪的视觉定位模块定位海绵切割的位置,然后毛边识别模块识别海绵切割处的毛边长度,在毛边长度超过预设值时,通过信息传输模块传输毛边信息到激光切割仪,使用激光切割仪进行二次切割,有利于提高海绵切割的质量。
附图说明
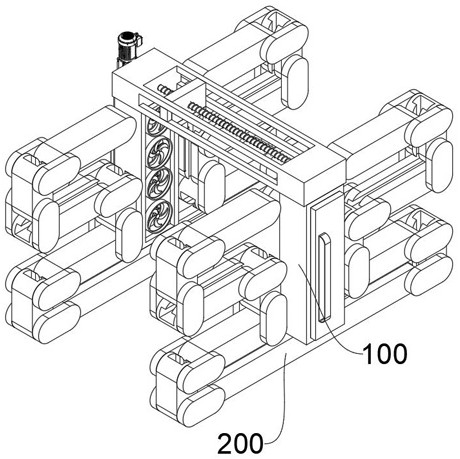
图1为本发明实施例1的整体结构示意图其一;
图2为本发明实施例1的整体结构示意图其二;
图3为本发明实施例1的整体结构示意图其三;
图4为本发明实施例1的整体结构示意图其四;
图5为本发明实施例1的切割龙门结构示意图;
图6为本发明实施例1的切割架结构分解示意图;
图7为本发明实施例1的延伸装置结构分解示意图;
图8为本发明实施例1的铰接轨结构分解示意图;
图9为本发明实施例2的滑块结构分解示意图;
图10为本发明实施例2的滚筒结构分解示意图;
图11为本发明实施例3的支撑架结构刨切图;
图12为本发明实施例3的刷板结构示意图;
图13为本发明实施例4的传送板结构分解示意图;
图14为本发明实施例5的激光切割仪结构分解示意图;
图15为本发明实施例5的毛边检测仪原理框图。
图中各个标号意义为:
100、切割龙门;110、支撑架;111、滑块;1111、转槽;1112、滚轮;1113、从动齿轮;1114、主动齿轮;1115、制动电机;1116、限位槽;1117、滚筒;112、空腔;113、分隔板;1130、引风扇;114、铰接门;115、刷板;1151、清理毛刷;1152、齿条;1153、联动齿轮;1154、移动电机;120、切割架;121、开槽;1210、定位槽;122、传送丝杆;1220、传送电机;123、传送板;1231、插槽;1232、定位块;1233、限位弹簧;124、激光切割仪;1240、毛边检测仪;
200、滑轨;210、延伸装置;211、铰接轨;2110、转动板;212、延伸轨;220、滑槽。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
请参阅图1-图8所示,本实施例提供一种智能控制清理毛边的海绵切割机,至少包括:
切割龙门100,切割龙门100包括两个对称的支撑架110,支撑架110底部固定连接有滑块111,两个支撑架110顶部之间固定连接有切割架120,切割架120顶部开设有开槽121,开槽121内部转动设有传送丝杆122,传送丝杆122端部连接有传送电机1220,传送电机1220外壁固定在切割架120外壁,由传送电机1220输出轴带动传送丝杆122转动在开槽121内部更轻松便捷,传送丝杆122外壁螺纹连接有传送板123,传送板123与开槽121内部截面尺寸相适配,可以在传送丝杆122转动时,使传送板123表面沿着传送丝杆122外壁的螺纹滑动在开槽121内部,方便后续调节切割的位置,有利于切割海绵呈弧形状,传送板123底部固定连接有激光切割仪124,激光切割仪124输出端可以释放激光,利用激光高温产生能量对海绵进行切割,同时由于激光光束细达到了省料精度高的要求,可以将海绵放在激光切割仪124下方进行激光切割,保证结构完整性;
本发明中的切割龙门100在具体使用时,可以将海绵放在激光切割仪124正下方,然后使切割龙门100在海绵外侧前后运动,由传送电机1220输出轴带动传送丝杆122转动在开槽121内部,传送板123表面沿着传送丝杆122外壁的螺纹滑动在开槽121内部,水平调节切割的位置,同时激光切割仪124输出端释放激光,利用激光高温产生能量对海绵进行切割。
滑轨200,滑轨200两端均铰接有延伸装置210,延伸装置210包括铰接轨211,铰接轨211一端通过转动板2110转动在滑轨200端部,转动板2110转动在滑轨200靠近端部的外壁,铰接轨211转动在转动板2110内壁,确保铰接轨211端部可以转动在滑轨200端部,铰接轨211设置有多个,两个铰接轨211之间通过转动板2110铰接有延伸轨212,通过转动板2110一端内壁转动在铰接轨211外壁,另一端内壁转动在延伸轨212外壁,可以确保铰接轨211端部和延伸轨212之间的相互转动,滑轨200、铰接轨211和延伸轨212顶部均连通开设有滑槽220,滑槽220与滑块111呈“T”字状适配,滑块111滑动在滑槽220内部,可以在将海绵放在切割龙门100内部时,根据海绵切割的长度,调节延伸装置210的水平长度,方便通过滑块111滑动在滑槽220内部,提高支撑架110和切割架120前后运动的范围,确保切割海绵更完整,适用性更强;
为了在不切割海绵时折叠节省滑轨200的占用空间,如图1,通过多个延伸轨212堆叠在滑轨200正上方,此时,可以通过转动板2110转动在滑轨200端部,使多个铰接轨211均与滑轨200垂直,多个延伸轨212均与滑轨200平行,使滑块111只能在滑轨200顶部开设的滑槽220内部滑动,切割范围最小,节省延伸装置210的占用空间;
为了可以根据海绵长度调节切割的范围,如图2-图3,通过部分延伸轨212堆叠在一起,另一部分延伸轨212和铰接轨211与滑轨200位于同一水平线上,此时,可以通过转动板2110转动在滑轨200端部,部分延伸轨212转动在铰接轨211端部,使部分铰接轨211和部分延伸轨212与滑轨200位于同一水平线上,另一部分铰接轨211均与滑轨200垂直,另一部分延伸轨212均与滑轨200平行,使滑块111可以沿着滑轨200在部分滑槽220内部滑动,可以延长切割的范围,在所有的铰接轨211和所有的延伸轨212均与滑轨200在同一水平线上,此时,可以使滑块111滑动在全部滑槽220内部,达到最大切割范围;
为了可以根据不同厚度的海绵调节切割的高度,如图4,通过多个延伸轨212堆叠在滑轨200正下方,使多个延伸轨212堆叠支撑滑轨200,提高滑轨200到地面的高度,从而使海绵放在切割龙门100底部时,调节激光切割仪124到海绵顶部的距离,适用不同厚度的海绵。
本发明中的滑轨200在具体使用时,根据海绵切割的长度,调节延伸装置210的水平长度,使滑块111滑动在滑槽220内部,带动支撑架110和切割架120前后运动,根据海绵切割的长度完整的切割海绵。
实施例2
为了使滑块111带动支撑架110和切割架120移动更轻松,本实施例与实施例1不同的是,请参阅图9-图10所示,其中:
滑块111底部开设有转槽1111,转槽1111内部转动设有两个对称的滚轮1112,滚轮1112外壁与滑槽220内腔底部紧密贴合,可以在滑块111在滑槽220内部滑动时,带动滚轮1112转动在转槽1111内部,使滚轮1112沿着滑槽220滚动,有利于减小滑块111底部与滑槽220内部的摩擦阻力,使滑块111带动支撑架110和切割架120移动更轻松。
具体的,为了带动滑块111自主的滑动在滑槽220内部,两个滚轮1112靠近端部的外壁均设有从动齿轮1113,两个从动齿轮1113外壁之间啮合有多个主动齿轮1114,多个主动齿轮1114外壁之间啮合连接,其中一个主动齿轮1114端部连接有制动电机1115,制动电机1115外壁固定在转槽1111内壁,可以由制动电机1115输出轴带动其中一个主动齿轮1114转动,使多个主动齿轮1114外壁啮合带动两个从动齿轮1113朝相同的方向转动,使两个滚轮1112在转槽1111内部朝相同方向转动,方便带动滑块111自主的滑动在滑槽220内部,操作方便,自动化程度高,方便更稳定的均匀切割海绵。
此外,为了减小滑块111与滑槽220内壁的摩擦阻力,滑块111两侧壁均开设有限位槽1116,限位槽1116内部等间距转动有多个滚筒1117,滚筒1117外壁与滑槽220侧壁紧密贴合,可以在滑块111滑动在滑槽220内部时,带动滚筒1117在限位槽1116内部转动,使滚筒1117沿着滑槽220侧壁滚动,可以减小滑块111与滑槽220内壁的摩擦阻力,不仅使移动更轻松,且减小磨损,有利于延长使用寿命。
实施例3
为了避免切割过程中的灰尘漂浮不利于工作人员的生命健康,本实施例与实施例1不同的是,请参阅图11-图12所示,其中:
支撑架110内部开设有空腔112,空腔112靠近端部的内壁设有分隔板113,分隔板113表面嵌设有多个引风扇1130,引风扇1130内部与空腔112内部连通,空腔112靠近外表面的端部铰接有铰接门114,可以由引风扇1130内部的马达带动风扇转动,将切割海绵过程中的灰尘从空腔112内表面端部经过引风扇1130内部,吸入空腔112与分隔板113之间,从而可以避免切割过程中的灰尘漂浮不利于工作人员的生命健康,提高安全性。
其中,为了将空腔112内壁附着的灰尘刷掉,方便集中收集灰尘,分隔板113和铰接门114之间滑动设有刷板115,刷板115滑动在空腔112内部,刷板115外壁等间距设有多个清理毛刷1151,清理毛刷1151端部紧密贴合空腔112内壁,可以在不使用时,通过刷板115在空腔112内部滑动,带动多个清理毛刷1151端部贴合空腔112内壁刷动,将空腔112内壁附着的灰尘刷掉,打开铰接门114,方便集中收集灰尘,节省劳动强度,方便清理,刷板115顶部固定连接有齿条1152,齿条1152外壁啮合有联动齿轮1153,联动齿轮1153转动在空腔112内腔顶部,联动齿轮1153端部连接有移动电机1154输出轴,移动电机1154外壁嵌设在空腔112内壁,由移动电机1154输出轴带动联动齿轮1153移动,可以使齿条1152啮合前后运动,带动刷板115前后运动更方便,提高自动化程度高。
实施例4
为了确保带动激光切割仪124移动更稳定,本实施例与实施例1不同的是,请参阅图13所示,其中:
支撑架110两侧壁开设有与开槽121内部连通的定位槽1210,传送板123两侧壁均设有定位块1232,定位块1232与定位槽1210相适配,可以在传送板123滑动在开槽121内部时,使定位块1232滑动在定位槽1210内部,可以使传送板123沿着定位块1232移动的方向水平移动,确保带动激光切割仪124移动更稳定。
值得说明的,为了缓冲碰撞的刚性冲击对传送板123底部的激光切割仪124的破坏,有利于延长使用寿命,传送板123两侧壁开设有插槽1231,定位块1232滑动在插槽1231内部,定位块1232端部与插槽1231内腔端部之间固定连接有限位弹簧1233,可以在外界碰撞到切割架120时,使定位块1232先接触外界碰撞的刚性冲击,使限位弹簧1233压缩,在限位弹簧1233弹力作用下,可以缓冲碰撞的刚性冲击对传送板123底部的激光切割仪124的破坏,有利于延长使用寿命。
实施例5
为了对初步切割后的海绵毛边进行检测,方便后续再次切割毛边,有利于提高海绵切割的质量,本实施例与实施例1不同的是,请参阅图14-图15所示,其中:
激光切割仪124底部设有毛边检测仪1240,毛边检测仪1240用于检测海绵切割外侧的毛边。
具体的,毛边检测仪1240内部设有视觉定位模块、毛边识别模块和信息传输模块,视觉定位模块用于准确的定位海绵切割处毛边的位置,毛边识别模块用于利用机器视觉对图像进行处理、分析和理解、识别视觉定位模块定位位置的毛边信息,信息传输模块用于接收毛边识别模块识别的毛边信息传输给激光切割仪124;
其中,视觉定位模块通过CCD将采集到的实物图像传输到PLC图像处理系统,通过图像处理定位软件计算出偏移位置及角度,然后反馈给控制器,采用KF算法进行位置矫正,使CCD可以采集海绵切割边缘的实物图像;
毛边识别模块采用图像分析算法,包括以下步骤:
①、图像信息的获取:将视觉定位模块采集的实物图像采用图像扫描仪等将图像数字化。
②、图像信息的存储:对获取的数字图像,处理过程中的图像信息以及处理结果存储在计算机等数字系统中。
③、计算机数字图像处理:用数字计算机或数字系统对数字图像进行的各种处理。
④、图像信息的传输:要解决的主要问题是传输信道和数据量的矛盾问题。
⑤、图像信息的输出和显示:用可视化方法进行输出和显示,分析毛边情况;
信息传输模块采用无线微波方法,把毛边识别模块摄取的毛边识别信号经调制后转换为电磁波发射至空中,可传输到激光切割仪124,同时在利用遥控信号发射机发出遥控摄像机动作的遥控信号,它是将控制信号编码、调制后发射至空中,再由置于监控现场的遥控信号接收机将遥控信号解调、解码后,用于遥控激光切割仪124的动作;
在使用激光切割仪124对海绵进行初步切割后,通过毛边检测仪1240的视觉定位模块定位海绵切割的位置,然后毛边识别模块识别海绵切割处的毛边长度,在毛边长度超过预设值时,通过信息传输模块传输毛边信息到激光切割仪124,使用激光切割仪124进行二次切割,有利于提高海绵切割的质量。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种智能控制清理毛边的海绵切割机
- 海绵切割机的毛边清理装置