一种机器人紧凑型存储和检索系统的配置方法
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及自动化仓储系统配置技术领域,具体涉及一种机器人紧凑型存储 和检索系统的配置方法。
背景技术
高密度仓储表现为两方面,一是货架高度不断增大,以此来充分利用仓储占 地面积;二是减少过道数量,从而可以在水平和垂直方向进行高密度存储。作为 一种新兴的自动化存取、货到人拆零拣选解决方案,机器人紧凑型存储和检索系 统(Robotic compactstorage and retrieval system,RCSRS)在提高人工拣 选效率、订单准确率以及货位利用率等方面表现突出,研究其系统配置方案,能 够进一步提升系统运作效率,降低企业投资成本,减少不必要的浪费。
在系统的配置优化方面,由于不同类型的自动化立体仓库运行特性不同, 在模型建立时考虑的因素也不同,但是降本增效一直是企业进行系统设计的目标。 机器人紧凑型存储和检索系统由于出现较晚,国内的第一个该系统也于2020年 才正式投入使用,相关研究者针对该系统的配置问题研究均基于软件仿真,或者 单纯追求高效率,并未考虑系统成本问题。
发明内容
为了克服以上技术问题,本发明的目的在于提供一种机器人紧凑型存储和 检索系统的配置方法,该方法同时考虑了系统效率和成本,提供不同配置的系 统构建方案。企业可根据自身需求选择配置方案,避免其因为前期仓库设计问 题在后期频繁改动产生的浪费,降低了企业实施新型机器人紧凑型存储和检索 系统的风险,具有较强实际应用价值。
为了实现上述目的,本发明采用的技术方案是:
一种机器人紧凑型存储和检索系统的配置方法,包括以下步骤;
1)根据机器人紧凑型存储、检索系统的作业流程和共享存储策略下机器人 的运行规则,确定配置优化的目标及问题变量,建立系统的配置优化模型;
2)使用多目标问题求解算法对步骤1)建立的模型进行优化求解,分别得到 以平均行程时间排序和以成本排序的最优解集。
所述步骤1)中机器人紧凑型存储、检索系统的作业流程分为出库、拣选、 入库三个环节;
根据系统的三阶段作业流程可知,系统中机器人服从双指令周期作业,即一 个任务周期内,机器人既在出库环节执行一个取货任务,又在入库环节执行一个 存货任务;因此,配置优化模型的一个目标是使得作业行程时间最短,将机器人 执行双命令周期任务进行拆解,分别建立每一过程中的机器人行程时间模型:
(1)订单到达后,若所有机器人都正忙,则需在订单队列中等待,否则将 订单分配给任意空闲的机器人(订单与机器人的分配是随机的),订单等待时间 记为T
(2)机器人接到指令,从驻留点(x
(3)假设目标料箱与工作站位置不重合,采用近似计算思想,机器人从驻 留点行驶至目标料箱所在位置(x
①当目标料箱位于区域A中,即
d
则机器人平均行驶距离:
②当目标料箱位于区域B中,即
d
则机器人平均行驶距离:
③当目标料箱位于区域C中,即
d
则机器人平均行驶距离:
④当目标料箱位于区域D中,即
d
则机器人平均行驶距离:
因此机器人在网格平面的平均行驶距离可近似计算如下:
机器人由驻留点到目标料箱所在位置平均行程时间:
(4)机器人停留在目标堆栈上方,取出阻碍料箱放至旁边堆栈,此部分时 间记为T
①上方阻碍料箱被提至堆栈顶部,此部分时间计算如下:
②将阻碍料箱移动至旁边的缓存堆栈上方顶层所花费时间:
③机器人从缓存堆栈上方移动至目标堆栈上方,此部分时间与上一个时间 相等,计算如下:
所以,移除一个阻碍料箱的时间:
当目标堆栈上方包含m个阻碍料箱时,所花费的总平均时间:
(5)机器人抓取目标料箱至目标堆栈顶层位置,所需时间计算如下:
(6)机器人将目标料箱输送至工作站,工作站坐标为
与计算驻留点到目标堆栈网格平面上所用时间类似,根据目标堆栈位置不同, 分为以下四种情况:
①目标料箱位于区域A时,机器人最远行驶距离:
则机器人平均行驶距离:
②当目标料箱位于区域B时,机器人最远行驶距离计算如下:
则机器人平均行驶距离:
③当机器人位于区域C时,机器人最远行驶距离计算如下:
d
则机器人平均行驶距离:
④当机器人位于区域D时,机器人最远行驶距离计算如下:
d
则机器人平均行驶距离:
综上,可近似计算得机器人将目标料箱输送至工作站的平均行程时间如下:
(7)当目标料箱输送至工作站时,分为两种情况:
①工作站处于空闲状态时,目标料箱无需等待,目标料箱被传至工人面前, 工作站位于系统的底层,一个待存储料箱由旋转臂交换提升至顶部传给机器人, 此过程花费时间计算如下:
②工作站处于忙碌状态时,设工作站处理前面队列任务时间为t
假设机器人到达工作站服从泊松分布,到达率为λ
工作站服务强度(忙碌概率)计算如下:
系统平均排队长(机器人平均排队对长)计算如下:
机器人平均队长:
机器人平均等待时间:
系统有两个工作站,即c=2,则各部分计算如下:
工作站处理前面队列任务时间计算如下:
则忙碌状态下工作站处理该任务时间计算如下:
综上,工作站服务时间计算计算如下:
最终工作站服务时间:
(8)将待存储料箱从工作站输送至待存储位置,由近似思想,此部分时间 近似为从目标料箱位置到工作站位置时间,此部分时间计算如下:
假设订单到达服从泊松分布,每小时到达λ个订单,系统中有r个机器人, 且每个订单服务时间相互独立,服从参数为μ的负指数分布,平均服务率为
机器人服务强度(忙碌概率):
当系统处于稳态时,系统平均排队队长计算如下:
订单平均队长计算如下:
订单等待时间计算如下:
综上,机器人执行一个双命令周期时间的行程时间模型如下:
系统的订单拣选由Nr个机器人完成,则系统的平均行程时间计算如下:
所述模型还考虑系统前期购置成本,建立成本模型。假设系统中单个料箱成 本为C
综合吞吐时间和成本模型,建立以系统长、宽、高、堆栈填充率、机器人数 量为变量的双目标优化模型:
minf(X)=min{f
其中和f
所述f
其中T为机器人执行一个双命令周期时间的行程时间模型:
所述步骤1)中问题变量为系统运行的参数,具体包括:系统的长度L、系 统的宽度W、系统的高度H、料箱的长度l、料箱的宽度w、料箱的高度h、堆栈 的填充率S、机器人水平方向上运行的速度v
所述步骤2)中求解多目标优化模型的算法为具有精英策略的非主导分类遗 传算法(NSGA-II)。首先随机产生一个种群P0作为初始父代种群,并对该种群 进行如下的非支配排序操作:
①个体x∈P,令种群中支配个体x的数量n
②令
③若
此时每个个体都被赋予了秩,即每一个解都被分配了相应非支配层级对应的 适应度值。其次,基于父代种群,执行二进制锦标赛选择、交叉、变异操作,以 获得大小为N的子代种群Q
其中,N表示目标函数的数量,
最后将新父种群P
本发明的有益效果:
本发明针对机器人紧凑型存储和检索系统的配置优化,通过分析系统的双命 令周期作业流程,分别建立机器人平均行程时间模型和系统建造成本模型。在此 基础上,构建以平均行程时间花费最少、成本花费最低为目标的Pareto多目标 优化模型,以系统的长、宽、高、堆栈填充率、机器人数量为决策变量。解决了 现有配置问题中研究均基于软件仿真,或单纯追求高效率,并未考虑系统成本的 问题。应用本发明,企业在进行初期规划时可结合自身需求选择合适的配置方案, 避免因为设计问题在后期频繁改动产生浪费,降低了企业实施新型机器人紧凑型 存储和检索系统的风险,具有较强实际应用价值。
进一步的,本发明采用NSGA-Ⅱ算法求解,得到Pareto前沿,Pareto前沿 上的每一个解集均为AutoStore的最优配置方案,这些方案可为企业应用机器人 紧凑型存储和检索系统提供参考。
进一步的,本发明还通过分析堆栈填充率这一参数得到不同解集下系统最优 尺寸设计。
附图说明
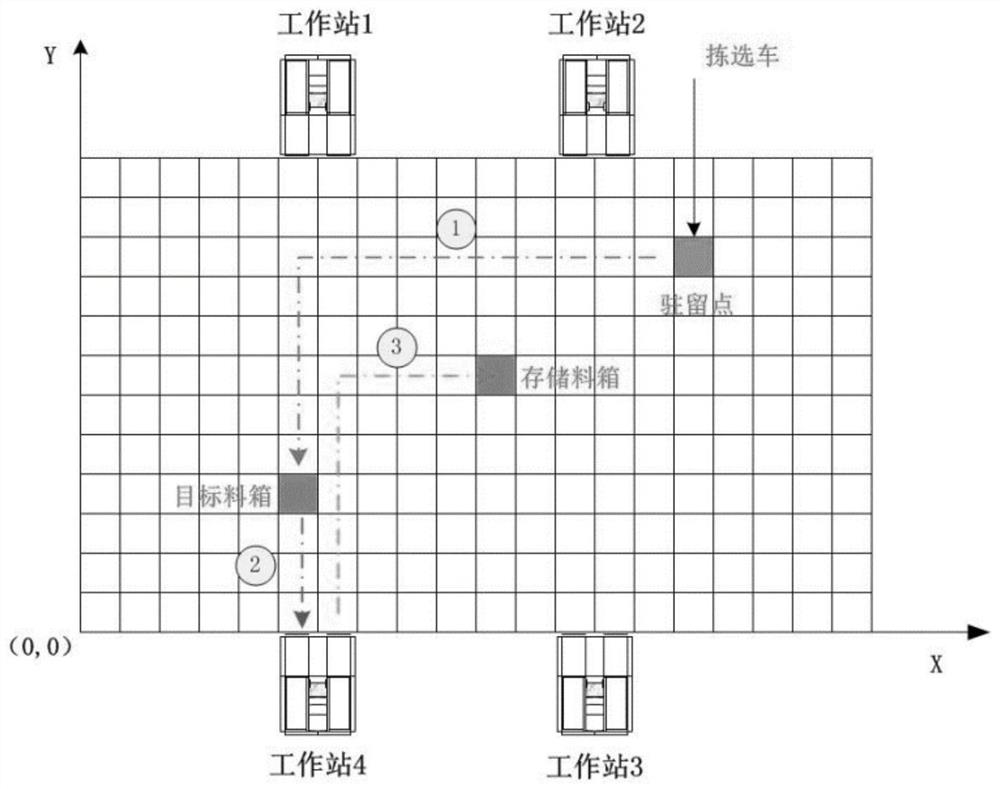
图1为系统作业示意图。
图2为目标堆栈填充示意图。
图3为目标料箱位置示意图。
图4为拥挤距离排序示意图。
图5为NSGA-II算法流程图。
图6为配置优化问题的Pareto前沿。
具体实施方式
下面结合附图对本发明作进一步详细说明。
本发明提供的一种机器人紧凑型存储和检索系统的资源配置优化方法,具体 按照以下步骤实施:
步骤1构建机器人紧凑型存储和检索系统的配置优化模型;
对机器人紧凑型存储和检索系统进行分析研究,确定决策变量及优化目标;
参见图1,系统中货物由机器人从单元料箱中拣选出来运送到工作站,再由 工作人员根据系统提示进行拣选。
系统作业包含以下三种:
(1)出库作业。系统接到客户订单后生成出库指令,分配空闲的机器人根 据指令进行拣选作业,机器人采用驻留点策略,即完成一个任务后停在该任务堆 栈上方,接到指令后从驻留点移动至目标料箱堆栈处进行取货作业。如果此时所 有机器人均处于工作状态,则该订单在订单队列中等待。由于一个订单中可能包 含多种商品,商品存储位置的不同可能导致需要多个机器人完成一个订单。
(2)拣选作业。机器人将目标料箱从堆栈取出后送至工作站,订单中所包 含的商品由员工从存储料箱中取出,并将其放置于订单料箱中,由传送带输送至 下一环节进行包装出库等。入库的货物被装在托盘上自动输送至符合人体工程学 的入库站台。每个站台配有一名员工,将托盘上的货物放入存储料箱,此过程中, 设计的可提升桌板省区了员工的弯腰环节,高度符合人体工程学。每个站台配有 滑道,供员工投入废弃包装,实现工作环境整洁、高效,同时体现了绿色物流的 理念。
(3)入库作业。机器人完成拣选任务后,工作站的旋转臂将上一个完成拣 选的存储料箱分配给该机器人,机器人将该存储料箱运至相应的存储货位。存储 区为铝制框架,料箱被机器人堆叠起来存放在铝制框架的货格内,电池供电的机 器人可在顶部行走,由一套无线系统控制。快销品的料箱被放置在货格顶端,而 慢销品的料箱则放置在货格的下层位置。
本发明以系统平均吞吐时间最短和仓储成本最少为配置优化的目标,以系统 的长L、宽W、高H、堆栈填充率S、机器人数量Nr为决策变量。
根据上述系统作业流程,建立双命令周期行程时间模型;
首先分析目标料箱在堆栈中的存储情况,如图2所示,堆栈高度为H,堆栈 填充率为S,已存储货位高度H
双命令周期下,系统先执行一个取货任务再执行一个存货任务,行程时间可 按步骤动作分步进行求解:
(1)订单到达后,若所有机器人都正忙,则需在订单队列中等待,否则将 订单分配给任意空闲的机器人(订单与机器人的分配是随机的),订单等待时间 记为T
(2)机器人接到指令,从驻留点(x
(3)假设目标料箱与工作站位置不重合,采用近似计算思想,机器人从驻 留点行驶至目标料箱所在位置(x
①参见图3,当目标料箱位于区域A中,即
d
则机器人平均行驶距离:
②当目标料箱位于区域B中,即
d
则机器人平均行驶距离:
③当目标料箱位于区域C中,即
d
则机器人平均行驶距离:
④当目标料箱位于区域D中,即
d
则机器人平均行驶距离:
因此机器人在网格平面的平均行驶距离可近似计算如下:
机器人由驻留点到目标料箱所在位置平均行程时间:
(4)机器人停留在目标堆栈上方,取出阻碍料箱放至旁边堆栈,此部分时 间记为T
①上方阻碍料箱被提至堆栈顶部,此部分时间计算如下:
②将阻碍料箱移动至旁边的缓存堆栈上方顶层所花费时间:
③机器人从缓存堆栈上方移动至目标堆栈上方,此部分时间与上一个时间 相等,计算如下:
所以,移除一个阻碍料箱的时间:
当目标堆栈上方包含m个阻碍料箱时,所花费的总平均时间:
(5)机器人抓取目标料箱至目标堆栈顶层位置,所需时间计算如下:
(6)机器人将目标料箱输送至工作站,工作站坐标为
与计算驻留点到目标堆栈网格平面上所用时间类似,根据目标堆栈位置不同, 分为以下四种情况:
⑤目标料箱位于区域A时,机器人最远行驶距离:
则机器人平均行驶距离:
⑥当目标料箱位于区域B时,机器人最远行驶距离计算如下:
则机器人平均行驶距离:
⑦当机器人位于区域C时,机器人最远行驶距离计算如下:
d
则机器人平均行驶距离:
⑧当机器人位于区域D时,机器人最远行驶距离计算如下:
d
则机器人平均行驶距离:
综上,可近似计算得机器人将目标料箱输送至工作站的平均行程时间如下:
(7)当目标料箱输送至工作站时,分为两种情况:
①工作站处于空闲状态时,目标料箱无需等待,目标料箱被传至工人面前, 工作站位于系统的底层,一个待存储料箱由旋转臂交换提升至顶部传给机器人, 此过程花费时间计算如下:
②工作站处于忙碌状态时,设工作站处理前面队列任务时间为t
假设机器人到达工作站服从泊松分布,到达率为λ
工作站服务强度(忙碌概率)计算如下:
系统平均排队长(机器人平均排队对长)计算如下:
机器人平均队长:
机器人平均等待时间:
系统有两个工作站,即c=2,则各部分计算如下:
工作站处理前面队列任务时间计算如下:
则忙碌状态下工作站处理该任务时间计算如下:
综上,工作站服务时间计算计算如下:
最终工作站服务时间:
(8)将待存储料箱从工作站输送至待存储位置,由近似思想,此部分时间 近似为从目标料箱位置到工作站位置时间,此部分时间计算如下:
假设订单到达服从泊松分布,每小时到达λ个订单,系统中有r个机器人, 且每个订单服务时间相互独立,服从参数为μ的负指数分布,平均服务率为
机器人服务强度(忙碌概率):
当系统处于稳态时,系统平均排队队长计算如下:
订单平均队长计算如下:
订单等待时间计算如下:
综上,机器人执行一个双命令周期时间的行程时间模型如下:
系统的订单拣选由Nr个机器人完成,则系统的平均行程时间计算如下:
建立成本模型;
本申请仅考虑前期购置成本,假设系统中单个料箱成本为C
综合以上建立的双指令周期作业行程时间模型和成本模型,本发明以系统平 均吞吐时间最短和仓储成本最少为配置优化的两个目标,以系统的长L、宽W、 高H、堆栈填充率S、机器人数量Nr为决策变量,将单配置优化模型转化为基于 Pareto的多目标优化问题。本发明的系统配置优化模型即为如下:
minf(X)=min{f
步骤2求解步骤1中建立的双目标优化模型,确定仓储系统的最优配置方 案。
采用具有精英策略的非主导分类遗传算法(NSGA-II)求解模型,具体步骤 如下:
(1)编码与解码
采用混合整数编码方式,每一个完整的配置规划方案可看做是一条染色体, 其个体由(L,W,H,S,Nr)构成,每条染色体上的所有基因分别对应于系统货 架长、宽、高、堆栈填充率、机器人数量。解码的过程即根据约束条件的限制, 得到一组染色体,即系统最终的配置规划规划方案。
(2)适应度函数
在系统配置优化模型中,适应度函数由系统平均行程时间、仓储成本的两个 目标函数构成,两个目标函数能够共同反映在整个种群中染色体个体的适应性。 因为所有目标函数都是最小值,即系统平均行程时间越短、仓储成本越少,那么 该个体的适应度函数值应该越大;反之,个体的适应度函数值应该越小,我们适 当转换两个目标函数如下:
g
g
这里,g
(3)非支配排序
机器人紧凑型存储和检索系统配置优化问题的设计关键是找到配置方案的Pareto最佳解集,而支配排序是根据各个支配解的级别对种群进行分层,从而 引导对Pareto最佳解集的搜索。种群P的非支配排序过程如下:
①个体x∈P,令种群中支配个体x的数量n
②令
③若
(4)拥挤距离排序
拥挤距离用于评估具有相同非支配层级的一个解周围其他解的密集度,通过 优先选择具有较大拥挤距离的个体,可使计算结果均匀分布在目标空间内以维持 种群的多样性。对于同层级的第i条染色体,它的拥挤距离id为相邻染色体i- 1和i+1分别在n个目标函数中的适应度差值的累和均值,计算方法如下:
其中,N表示目标函数的数量,
拥挤距离排序基于拥挤比较算子大于n时,当且仅当非支配排序值irank< jrank(即个体i所处的非支配层级优于个体j所处的非支配层),或irank=jrank 且id>jd,认定i
(5)NSGA-II算法具体步骤
算法流程图参见图5,具体实施步骤为:
Step①:初始化种群。首先随机产生一个种群P0为初始父代种群,并对该 种群进行非支配排序操作,此时每个个体都被赋予了秩,也就是说每一个解都被 分配了相应非支配层级(1为最优层级)对应的适应度值;
Step②:产生子代种群。基于父代种群,执行二进制锦标赛选择、交叉、变 异操作,以获得大小为N的子代种群Q
Step③:非支配排序。合成新的群体R
Step④:拥挤距离排序。将得到的非支配解集Zi按照拥挤距离排序,其中 最好的N个个体被组成为新父种群Pt+1,这个步骤就是精英保留策略;
Step⑤:种群优化。将新父种群P
Step⑥:判断终止条件。如果此时迭代次数Gen恰好等于迭代次数,那么输 出此时的结果,运行结束;否则,Gen=Gen+1,返回Step③。
接着进行仿真实验探究:
为对机器人紧凑型存储和检索系统的配置优化问题进行不同配置方案的示 例分析,进行数值实验仿真,并对实验数据结果进行分析。实验环境参见表1。
表1.实验环境
由于机器人紧凑型存储和检索系统为新兴智能仓储系统,目前在国内的应用 数据尚不可知,因此本发明采用模拟数据代替,探究系统尺寸和堆栈填充率与系 统效率、成本之间的关系,参照系统官网,设置其各项参数如表2。
表2.基本参数值
系统的整体尺寸为系统的长、宽、高,其他参数一定的情况下,系统尺寸与 堆栈填充率约小,则平均行程时间与成本越低。考虑实际条件,为了满足企业应 用需求,续设定满足系统的最低容量要求,即分别对各个变量进行范围约束,各 个变量的取值范围如表3。
表3.变量范围值
根据NSGA-II的算法步骤,本发明使用MATLAB R2016a运行算法程序对模型 进行求解,算法参数设置如表4。将算法进行200次迭代,得到Pareto前沿参 见图6。从图6中可以看出,Pareto前沿为为一条平滑的曲线,且解集分布广 泛,结合Pareto前沿的意义,此曲线上对应的每一组解都是最优解集。此曲线 的横轴为成本,纵轴为平均行程时间,可以看出,随着平均吞吐时间的降低,系 统成本不断增加,这是因为平均吞吐时间的增加势必需要更多的机器人来完成订 单拣选任务,由此带来成本部分的增长。
表4.算法参数设置
参见表5分析以平均行程时间排序的最优解集,平均行程时间最短至1.82s, 约为最长平均行程时间的1/78,此时系统长64m,宽37m,高4m,堆栈填充率达 到1,即每一堆栈都放置料箱,系统包含20台机器人。易知,高吞吐时间对应扁 平化仓库,与其他类型的仓储系统配置优化结果趋势一致。同时,机器人数量随 着效率的提高而增加,结果表明,增加机器人数量是提高系统运作效率的有效途 径之一。
表5.以平均行程时间排序的Pareto最优解
参见表6,分析以成本排序的最优解,成本最低可至27.16万元,约为成本 最高方案的1/10,此时系统长76m,宽5m,高28m,堆栈填充率为0.93,机器人 只有一台,系统外观呈窄高型,最大化减少了土地占用面积,但是平均行程时间 却也达到了141.78s。
表6.以成本排序的Pareto最优解
综合以上分析,仓储系统的平均行程时间与成本呈“效益背反”效应,企业 在进行初期规划时应结合自身需求选择合适的配置方案,避免因为设计问题在后 期频繁改动产生浪费。
- 一种机器人紧凑型存储和检索系统的配置方法
- 一种紧凑型机器人一体化关节模组及紧凑型机器人