一种重载水平多关节机器人
文献发布时间:2023-06-19 18:25:54
技术领域
本发明属于重载搬运机器人领域,具体地说是一种重载水平多关节机器人。
背景技术
水平关节机器人具备动作灵活,适合在有限空间内工作的特点,一般用进行较小负载的快速搬运工作。传统的水平关节机器人I轴、II轴一般在高度方向叠加布置,需要在高度上占用一定空间。当在需要进行重型货物搬运且安装高度空间有限的应用场合,如车载环境、空间较小且高度有限的车间环境等,传统的水平关节机器人、搬运机器人等均难以有效适应。
发明内容
针对传统水平关节机器人难以适应重载搬运而高度空间受限条件的问题,本发明的目的在于提供一种重载水平多关节机器人。
本发明的目的是通过以下技术方案来实现的:
一种重载水平多关节机器人,包括基座、大臂、辅助臂及小臂,所述大臂的内部为中空结构,所述大臂内腔中靠近所述基座的一端设有I轴回转机构、远离所述基座的另一端设有II轴回转机构,所述I轴回转机构与所述基座连接、使所述大臂具有相对于所述基座转动的自由度,所述II轴回转机构与所述辅助臂的一端连接、使所述辅助臂具有相对于所述大臂转动的自由度,所述辅助臂的另一端与所述小臂的一端连接;
所述大臂的高度位置与所述小臂的高度位置相同。
所述大臂内腔中安装有用于控制所述I轴回转机构及所述II轴回转机构动作的控制元件。
所述I轴回转机构包括驱动元件A、行星减速机A及回转减速机A,所述驱动元件A及行星减速机A分别安装于所述大臂内腔中,所述行星减速机A的输入端与所述驱动元件A的驱动端连接、输出端与所述回转减速机A的输入端连接,所述回转减速机A的外壳与所述大臂连接,所述回转减速机A的输出端与所述基座连接。
所述II轴回转机构包括驱动元件B、行星减速机B及回转减速机B,所述驱动元件B及行星减速机B分别安装于所述大臂内腔中,所述行星减速机B的输入端与所述驱动元件B的驱动端连接、输出端与所述回转减速机B的输入端连接,所述回转减速机B的外壳与所述大臂连接,所述回转减速机B的输出端与所述辅助臂的一端连接。
所述辅助臂的内部为中空结构,所述辅助臂内腔中设有用于带动所述小臂的一端转动的随动传动机构。
所述随动传动机构包括输入齿轮、输出齿轮及若干个传动齿轮,所述输出齿轮的齿轮轴与所述小臂的一端连接,所述输入齿轮的齿轮轴与所述大臂连接,所述输出齿轮的齿轮轴及各所述传动齿轮的齿轮轴分别与所述辅助臂转动连接,各所述传动齿轮依次分别与相邻的其他传动齿轮啮合,第一个所述传动齿轮与所述输入齿轮啮合,最后一个所述传动齿轮与所述输出齿轮啮合。
所述输入齿轮的轴向中心线、所述输出齿轮的轴向中心线及各所述传动齿轮的轴向中心线均平行,所述输入齿轮的轴向中心线与所述回转减速机B输出端的转动轴线共线。
所述大臂远离所述基座的另一端设有双连接耳部A,所述辅助臂的一端伸入至所述双连接耳部A的内侧、与所述大臂转动连接;所述小臂的一端设有双连接耳部B,所述辅助臂的另一端伸入至所述双连接耳部B的内侧、与所述小臂转动连接。
所述小臂内部为中空结构,所述小臂内腔中靠近所述辅助臂的一端设有钢丝绳卷扬机构、远离所述辅助臂的一端转动安装有导向轮,所述小臂内腔中还安装有驱动元件C及卷扬机构减速机,所述卷扬机构减速机的输入端与所述驱动元件C的驱动端连接、输出端与所述钢丝绳卷扬机构转动轮轴连接,所述钢丝绳卷扬机构上的钢丝绳的自由端绕过所述导向轮、并与吊具连接。
所述卷扬机构减速机的输入端与所述驱动元件C的驱动端之间还设有二级制动器。
本发明的优点与积极效果为:
1.本发明将传统水平关节机器人大臂小臂叠放串联布置的形式改变为等高串联的形式,减小了高度空间占用,更加适应有限空间内重载搬运的使用场景,动作灵活且平稳快速。
2.本发明通过设有随动传动机构的辅助臂的设置,扩大了小臂的回转范围,解决了大臂与小臂直接等高串联导致的回转范围受限问题。
3.本发明通过将传统水平关节机器人的升降轴由丝杠丝母形式改变为钢丝绳卷扬形式,进一步减小了高度空间占用,增大了起升行程。
附图说明
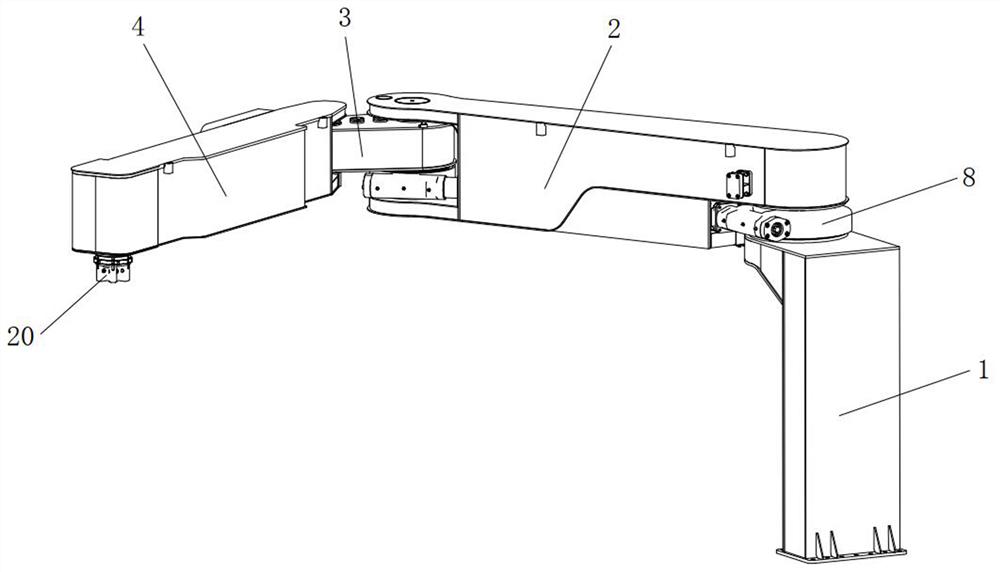
图1为本发明的整体结构示意图;
图2为本发明的大臂的内部结构示意图;
图3为本发明的辅助臂的内部结构示意图;
图4为本发明的小臂的内部结构示意图。
图中:1为基座、2为大臂、3为辅助臂、4为小臂、5为控制元件、6为驱动元件A、7为行星减速机A、8为回转减速机A、9为驱动元件B、10为行星减速机B、11为回转减速机B、12为输入齿轮、13为输出齿轮、14为传动齿轮、15为钢丝绳卷扬机构、16为导向轮、17为驱动元件C、18为卷扬机构减速机、19为钢丝绳、20为吊具。
具体实施方式
下面结合附图1-4对本发明作进一步详述。
一种重载水平多关节机器人,如图1-4所示,包括基座1、大臂2、辅助臂3及小臂4,大臂2的内部为中空结构,大臂2内腔中靠近基座1的一端设有I轴回转机构、远离基座1的另一端设有II轴回转机构,I轴回转机构与基座1连接、使大臂2具有相对于基座1转动的自由度,II轴回转机构与辅助臂3的一端连接、使辅助臂3具有相对于大臂2转动的自由度,辅助臂3的另一端与小臂4的一端连接。大臂2的高度位置与小臂4的高度位置相同,也即使大臂2与小臂4形成等高串联的形式。本实施例中基座1采用矩形立柱结构,也可根据不同工况环境采用圆柱形立柱结构。
具体而言,如图1所示,本实施例中大臂2远离基座1的另一端设有双连接耳部A,辅助臂3的一端伸入至双连接耳部A的内侧、与大臂2转动连接;小臂4的一端设有双连接耳部B,辅助臂3的另一端伸入至双连接耳部B的内侧、与小臂4转动连接。通过设置分别用于与辅助臂3连接的双连接耳部A及双连接耳部B,可有效节约连接空间,能够充分满足使大臂2的高度位置与小臂4的高度位置相同的结构要求。
具体而言,如图2所示,本实施例中大臂2内腔中安装有用于控制I轴回转机构及II轴回转机构动作的控制元件5。本实施例中控制元件5的设置结构为现有技术,控制元件5与外接上位控制器连接。大臂2可对内部的控制元件5、I轴回转机构及II轴回转机构分别起到保护作用。
具体而言,如图2所示,本实施例中I轴回转机构包括驱动元件A 6、行星减速机A 7及回转减速机A 8,驱动元件A 6及行星减速机A 7分别安装于大臂2内腔中,行星减速机A 7的输入端与驱动元件A 6的驱动端连接、输出端与回转减速机A 8的输入端连接,回转减速机A 8的外壳与大臂2连接,回转减速机A 8的输出端与基座1连接。控制驱动元件A 6动作,可通过行星减速机A 7带动回转减速机A 8的输出端转动,使与回转减速机A 8的外壳连接的大臂2与基座1发生相对转动。本实施例中驱动元件A 6采用市购的伺服电机,由控制元件5控制动作;行星减速机A 7及回转减速机A 8也均为市购产品。通过驱动元件A 6、行星减速机A 7及回转减速机A 8配合设置而成的I轴回转机构,有效适用于重载搬运的情况,并有效节约空间。
具体而言,如图2和图3所示,本实施例中II轴回转机构包括驱动元件B 9、行星减速机B 10及回转减速机B 11,驱动元件B 9及行星减速机B 10分别安装于大臂2内腔中,行星减速机B 10的输入端与驱动元件B 9的驱动端连接、输出端与回转减速机B 11的输入端连接,回转减速机B 11的外壳与大臂2连接,回转减速机B 11的输出端与辅助臂3的一端连接。控制驱动元件B 9动作,可通过行星减速机B 10带动回转减速机B 11的输出端转动,使与回转减速机B 11的外壳连接的大臂2与辅助臂3发生相对转动。本实施例中驱动元件B 9采用市购的伺服电机,由控制元件5控制动作;行星减速机B 10及回转减速机B 11也均为市购产品。通过驱动元件B 9、行星减速机B 10及回转减速机B 11配合设置而成的II轴回转机构,有效适用于重载搬运的情况,并有效节约空间。
具体而言,如图3所示,本实施例中辅助臂3的内部为中空结构,辅助臂3内腔中设有用于带动小臂4的一端转动的随动传动机构,随动传动机构包括输入齿轮12、输出齿轮13及两个传动齿轮14,输出齿轮13的齿轮轴与小臂4的一端连接,输入齿轮12的齿轮轴的上端穿过辅助臂3与大臂2连接,输出齿轮13的齿轮轴及各传动齿轮14的齿轮轴分别与辅助臂3转动连接,各传动齿轮14依次分别与相邻的其他传动齿轮14啮合,第一个传动齿轮14与输入齿轮12啮合,最后一个传动齿轮14与输出齿轮13啮合。本实施例中输入齿轮12的轴向中心线、输出齿轮13的轴向中心线及各传动齿轮14的轴向中心线均平行,输入齿轮12的轴向中心线与回转减速机B 11输出端的转动轴线共线。
当回转减速机B 11的输出端转动时,带动辅助臂3随之相对大臂2转动,同时由于输入齿轮12的齿轮轴与大臂2相连,辅助臂3转动时和输入齿轮12间产生相对转动,之后带动各传动齿轮14旋转,将转动传递到最后的输出齿轮13上,输出齿轮13的齿轮轴上下两端均与小臂4相连,因此带动小臂4相对辅助臂3转动。实现通过一个驱动元件B 9带动辅助臂3与小臂4两个部分转动,进而实现小臂4的随动回转;且本实施例中齿轮机构总传动比为1,小臂4相对辅助臂3、辅助臂3相对大臂2的转速相同,转向相同。通过随动传动机构的设置,使小臂4相对大臂2可以实现正负180度的运动范围,避免小臂4与大臂2之间叠放设置,可大幅度节省空间,扩大了小臂4的回转范围,解决了大臂2与小臂4直接等高串联导致的回转范围受限问题。
具体而言,如图4所示,本实施例中小臂4内部为中空结构,小臂4内腔中靠近辅助臂3的一端设有钢丝绳卷扬机构15、远离辅助臂3的一端转动安装有导向轮16,小臂4内腔中还安装有驱动元件C 17及卷扬机构减速机18,卷扬机构减速机18的输入端与驱动元件C 17的驱动端连接、输出端与钢丝绳卷扬机构15转动轮轴连接,钢丝绳卷扬机构15上的钢丝绳19的自由端绕过导向轮16、并与吊具20连接。本实施例中钢丝绳卷扬机构15采用现有技术的钢丝绳卷筒结构。本实施例中驱动元件C 17采用市购的伺服电机,由外接上位控制器连接;卷扬机构减速机18也为市购产品。本实施例中吊具20采用现有技术,可采用手动吊具也可以采用自动吊具,用于连接负载,可根据实际使用需求灵活配置,使机器人可灵活应对不同的使用需求。控制驱动元件C 17动作,可以通过卷扬机构减速机18、钢丝绳卷扬机构15带动钢丝绳19,钢丝绳19拉动吊具20升降。卷扬机构减速机18的输入端与驱动元件C 17的驱动端之间还设有二级制动器。本实施例中的二级制动器也为市购产品,可充分起到制动保护作用。通过将传统水平关节机器人的升降轴由丝杠丝母形式改变为钢丝绳卷扬形式,进一步减小了高度空间占用,增大了起升行程,更加适应有限空间内重载搬运的使用场景。
工作原理:
使用时,将吊具20与负载连接;控制驱动元件A 6动作,可通过行星减速机A 7带动回转减速机A 8的输出端转动,使与回转减速机A 8的外壳连接的大臂2与基座1发生相对转动;控制驱动元件B 9动作,可通过行星减速机B 10带动回转减速机B 11的输出端转动,使与回转减速机B 11的外壳连接的大臂2与辅助臂3发生相对转动,辅助臂3通过随动传动机构带动小臂4随动回转;通过I轴回转机构、II轴回转机构的设置,且使大臂2的高度位置与小臂4的高度位置相同,可有效适用于重载搬运的情况,并有效节约空间;通过将传统水平关节机器人的升降轴由丝杠丝母形式改变为钢丝绳卷扬形式,进一步减小了高度空间占用,增大了起升行程,更加适应有限空间内重载搬运的使用场景。
- 一种水平多关节SCARA型协作吊装机器人
- 一种重载型SCARA水平多关节机械手
- 一种平面关节型机器人用水平关节四轴手臂