一种自适应装配式墙面系统及其数字化装配方法
文献发布时间:2023-06-19 19:14:59
技术领域
本发明属于建筑室内墙体隔墙、墙面装饰技术领域,特别涉及一种自适应装配式墙面系统及其数字化装配方法。
背景技术
随着装配式建筑的推广,建筑室内墙体隔墙、墙面装饰技术全面进入干法作业、装配式作业、使用智能机械作业的阶段,但目前的装配式装修存在产业工人短缺、技工技术参差不齐、智能机器非全数字化致装配的面层不抵传统施工的精美、现场频繁动锯、装配后还未达到全面标准化等短板。
发明内容
针对上述问题,本发明提供一种新的自适应装配式墙面系统及其数字化装配方法。
本发明具体技术方案如下:
本发明提供一种自适应装配式墙面系统,包括数控红外随动制导子系统、数控找平造型及预埋件子系统、装配式模块化可伸缩轻钢龙骨隔墙、装配式窗套、数控装配式墙板子系统、带安装治具的装配式室内门以及装配式无底盒插座;
所述数控红外随动制导子系统用于将原始图纸投射到原始房间,并制导数控找平造型及预埋件子系统在原始房间墙面制安点桩、预埋件和装配式模块化可伸缩轻钢龙骨隔墙;
所述数控装配式墙板子系统安装于所述原始房间的内墙面上,所述装配式窗套、带安装治具的装配式室内门以及装配式无底盒插座分别安装于所述原始房间的多个墙面上。
一种应用于自适应装配式墙面系统的数字化装配方法,包括虚拟数字化装配方法和实物数字化装配方法;所述虚拟数字化装配方法自墙面凸点速扫仪扫描窗面墙墙面并装配数控找平标准点桩至下单完成;所述墙面凸点速扫仪设于带安装治具的装配式室内门的安装治具上,分别扫描窗面墙墙面、门面墙墙面、门对面墙墙面、窗对面墙墙面,从实时点云中分别圈出窗面墙墙面、门面墙墙面、门对面墙墙面、窗对面墙墙面最凸的各两点;所述数控红外角度标尺放置到窗面墙墙面和门对面墙墙面交汇处、两数控红外随动制导车分别放到窗面墙墙面和门面墙墙面交汇处、门对面墙墙面和窗对面墙墙面交汇处,发出指令让数控红外角度标尺和两数控红外随动制导车四面垂直、底面水平、距离窗面墙墙面、门面墙墙面、门对面墙墙面、窗对面墙墙面分别约70mm-110mm的红外线网并启动红外随动功能;所述激光数控点桩仪复核窗面墙墙面最凸两点并确定一个最凸点后,根据原始图纸设定窗面墙墙面的最短数控找平标准点桩数值并输入激光数控点桩仪,激光数控点桩仪在窗面墙墙面上模糊作业粘接出N个间距小于500mm的数控找平标准点桩;所述激光数控点桩仪复核门面墙墙面、门对面墙墙面、窗对面墙墙面分别确定各面最凸点且标记后,将激光数控点桩仪内置胶棒更换成适用窗洞厚的标尺棒垂直抵住窗框,不带窗台石耳朵的窗台石、窗套侧板、窗套顶板的宽度值等于标尺到激光数控点桩仪刀口最前端的数值加上激光数控点桩仪刀口最前端到刚才输入激光数控点桩仪的最短数控找平标准点桩设定点的距离数值加上标准装配式墙板套装厚度数值的和,将不带底车的数控红外随动制导车放入窗面墙墙面的窗洞中获取即时数据,综合数据后根据原始图纸下单窗台石、窗套侧板、窗套顶板的完整数据所述借助不带底车的数控红外随动制导车,模糊作业在窗面墙墙面的窗洞四面粘接出N个数控找平标准点桩;同理将所述不带底车的数控红外随动制导车移至门面墙墙面的门洞下单门顶装配式墙板、带安装治具的装配式室内门、带安装治具的装配式室内门的预埋挂件,然后将数控红外随动制导车移回带安装治具的装配式室内门的安装治具顶上,使带安装治具的装配式室内门的安装治具的水平激光面举升至原始图纸设定的标准装配式墙板套装顶面,根据数控红外随动制导车测定的原始房间六面体数据并结合窗台石、窗套侧板、窗套顶板的数据,按原始图纸的要求分别下单窗上口装配式墙板、窗台下口装配式墙板、应用于带安装治具的装配式室内门的预埋挂件、用于装配式墙板的预埋件、窗右装配式边缘墙板、窗左装配式边缘墙板,同理下单所述轻钢龙骨隔墙天地骨预埋件、轻钢龙骨隔墙预埋边龙骨、装配式模块化可伸缩轻钢龙骨隔墙、装配式墙板边缘板、平面造型装配式墙板、弧形造型装配式墙板、平面和弧形造型装配式墙板右侧尽头边缘板、窗对面近门侧边缘板、门合页侧装配式墙板、门锁侧装配式边缘板、门顶装配式墙板、标准装配式墙板套装、装配式无底盒插座、装配式踢脚线套装;所述实物数字化装配方法包括激光数控点桩仪、带安装治具的装配式室内门的安装治具,数控装配车在数控红外随动制导子系统的制导下,完成数控找平造型及预埋件子系统的点桩和预埋件、装配式模块化可伸缩轻钢龙骨隔墙、装配式窗套、数控装配式墙板子系统的饰面层、带安装治具的装配式室内门、装配式无底盒插座的数字化装配;所述窗台石、窗套侧板、窗套顶板背面模糊作业点涂免钉胶其余满涂聚氨酯泡沫胶抵住窗框内侧自下而上粘贴到窗洞上,然后对齐窗套顶板侧面将装配式墙板、窗台下口装配式墙板下上抵住装配式窗套顶底模糊作业粘贴到窗面墙墙面上;所述数控红外角度标尺放到窗面墙墙面和门对面墙墙面交汇处、两数控红外随动制导车分别放到窗面墙墙面和门面墙墙面交汇处、门对面墙墙面和窗对面墙墙面交汇处,发出指令让数控红外角度标尺的角度标尺主支架直角右板搭载的角度校准红外传感器一、角度校准红外传感器二、角度校准红外传感器三物理平行或借用激光数控点桩仪使之平行于窗套顶板内边,然后锁定角度标尺主支架使之不再转动、指令两数控红外随动制导车与数控红外角度标尺组四面垂直、底面水平、距离窗面墙墙面、门面墙墙面、门对面墙墙面、窗对面墙墙面分别约70mm-110mm的红外线制导网并启动红外随动功能;根据所述原始图纸、在数控红外随动制导子系统的红外制导网制导下模糊作业门面墙墙面、门对面墙墙面的数控找平标准点桩、数控找平平面造型点桩、数控找平弧面造型点桩,预埋点桩加强筋、轻钢龙骨隔墙天地骨预埋件、轻钢龙骨隔墙预埋边龙骨、用于装配式墙板的预埋件,装配装配式模块化可伸缩轻钢龙骨隔墙;带中心外筒的举升平台降至举升平台底板接近开关接近数控装配车底板、带红外平行器架的活动叉耙收至贴合装配车承重中心外筒后步进电机麦克纳姆轮先横向始离距窗台下口装配式墙板边下一个欲装配的窗上口装配式墙板二分之一宽值后,竖向驶向窗面墙墙面,竖向对齐红外感知器引导数控装配车与窗面墙墙面侧的红外制导网立面红外线重叠时,数控装配车停止行驶并调平,调平完成带中心外筒的举升平台升高至窗对面近门侧边缘板与红外制导网水平红外线重叠后,自动数控升降至原始图纸所述高度,搭载红外平行校准器的带红外平行器架的活动叉耙自动伸出触碰到红外制导网立面红外线设定零点后带红外平行器架的活动叉耙自动缩回归为完成校准;将所述标准装配式墙板套装垂直居中搁置在自带活动轴的横向微导辊上由电动吸盘吸住,活动叉耙水平移动步进电机驱动装配车固定叉耙上的标准装配式墙板套装移至与窗台下口装配式墙板同平面时,将连接在标准装配式墙板套装背面焊接有双通滚花螺母镶嵌件的金属板上的用于装配式墙板的预埋件公卡拍入预埋在窗面墙墙面上的用于装配式墙板的预埋件母卡中,然后将预插在标准装配式墙板套装侧面的增强纤维尼龙榫片侧面定位连接销分别对准窗上口装配式墙板窗台下口装配式墙板对应的孔槽,侧推标准装配式墙板套装插入对应的孔槽,最后将预插在标准装配式墙板套装顶底的焊接有定位销的金属拉条上的定位销分别插入窗上口装配式墙板窗台下口装配式墙板对应的孔槽完成两块板的连接;所述窗面墙墙面装配完成后,门对面墙墙面近窗的第一块标准装配式墙板套装侧面紧贴窗右装配式边缘墙板饰面装配,依次完成平面造型装配式墙板装配式墙板边缘板平面和弧形造型装配式墙板右侧尽头边缘板的装配;所述门面墙墙面近窗的第一块标准装配式墙板套装侧面紧贴窗左装配式边缘墙板饰面装配,依次完成门锁侧装配式边缘板门顶装配式墙板的装配并试拼装;确定所述窗对面墙墙面到门合页侧装配式墙板近窗对面墙墙面侧边的最短数控找平标准点桩并通过激光传感接受器设置好激光数控点桩仪后,取下门合页侧装配式墙板在窗对面墙墙面上模糊作业粘接出N个数控找平标准点桩,窗对面墙墙面近平面和弧形造型装配式墙板右侧尽头边缘板的第一块标准装配式墙板套装侧面紧贴平面和弧形造型装配式墙板右侧尽头边缘板饰面装配,直至窗对面近门侧边缘板装配、门合页侧装配式墙板侧面紧贴窗对面近门侧边缘板饰面装配完成;在所述带安装治具的装配式室内门的顶门套两边与门顶装配式墙板两边对齐的前提下,调节预埋,装配带安装治具的装配式室内门;依次装配所述门对面墙墙面、窗对面墙墙面、门面墙墙面近窗边、窗面墙墙面右窗边的装配式踢脚线套装,将装配式踢脚线套装粘贴到窗台下口装配式墙板、门合页侧装配式墙板下收口;最后将所述装配式无底盒插座连接接头卡到装配式无底盒插座开口完成原始房间内的所有装配。
本发明所取得的有益效果:
本发明提供一种新的自适应装配式墙面系统及其数字化装配方法,采用数控红外随动制导子系统链接了原始图纸的标准化和原始房间的非标化,数控找平造型及预埋件子系统在数控红外随动制导子系统制导下在原始房间上“长出”了新标准化的面,原始房间立面上的隔墙、门窗、墙板、插座由多款全数字化机器联动在数控红外随动制导子系统制导和原始房间上新“长出”的标准面双重约束下,装配出了符合原始图纸标准化的标准化成品,现场无一动锯。
附图说明
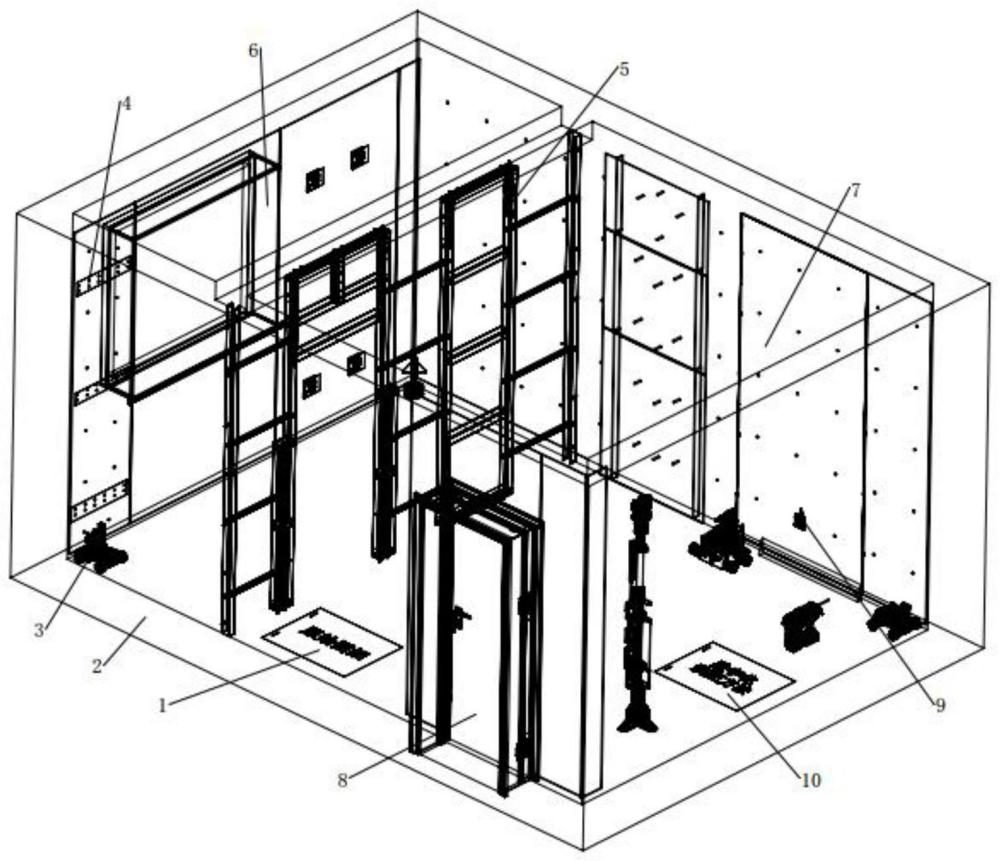
图1为本发明中自适应装配式墙面系统的结构示意图;
图2为本发明的数控红外随动制导子系统结构示意图;
图3为本发明的数控红外制导车爆炸结构示意图;
图4为本发明的数控红外角度标尺爆炸结构示意图;
图5为本发明的红外平行校准器爆炸结构示意图;
图6为本发明的数控姿态制导单元爆炸结构示意图;
图7为本发明的语音数控和无线蓝牙单元结构示意图;
图8为本发明的数控找平造型及预埋件子系统结构示意图;
图9为本发明的装配式窗套结构示意图;
图10为本发明的数控装配式墙板子系统结构示意图;
图11为本发明标准装配式墙板套装爆炸结构示意图;
图12为本发明装配式造型墙板和弧形墙板结构示意图;
图13为本发明装配式踢脚线套装结构示意图;
图14为本发明的数控装配车爆炸结构示意图;
图15为本发明的墙面凸点速扫仪爆炸结构示意图;
图16为本发明中应用于自适应装配式墙面系统的数字化装配方法结构示意图。
图中:1、原始图纸;2、原始房间;3、数控红外随动制导子系统;31、数控红外随动制导车;3101、麦克纳姆轮步进电机小车;3102、带蓝牙的主控板;3103、红外随动发射/接收基站一;3104、红外随动发射/接收基站二;3105、中下部步进电机驱动器;3106、360°红外激光水平管;3107、带强磁底座的步进电机调平台;3108、三轴加速度陀螺仪电路板;3109、测距模组用步进电机;3110、双发单收相位式测距模组;3111、测距模组上架;3112、航向角传感器模组;3113、上部步进电机驱动器;3114、光轴;3115、直线轴承;3116、带滑台的步进电机一;3117、带滑台的步进电机二;3118、360°红外激光竖向管;32、数控红外角度标尺;3201、带陀螺仪的步进电机调平台;3202、主支架步进电机;3203、高精度航向角传感器;3204、带蓝牙带的主控制板;3206、红外随动发射/接收基站三;3207、角度标尺主支架;3208、角度校准红外传感器一;3209、角度校准红外传感器二;3210、角度校准红外传感器三;3211、角度引导红外传感器一;3212、角度引导红外传感器二;33、红外平行校准器;3301、环形底座;3302、连接器公;3303、连接器母;3304、连接器转接板;3305、线槽;3306、红外传感器安装槽;3307、红外传感器限光口;3308、红外传感器硅管;3309、平行校准红外传感器一;3310、红外传感器后盖;3311、平行校准红外传感器二;3312、平行校准红外传感器三;34、数控姿态制导单元;3401、数控姿态底托;3402、倾角传感器可调底座;3403、可调底座韧带;3404、数字倾角传感器;3405、数控姿态底托上盖;3406、电源插座;3407、数控姿态主板;3409、双模蓝牙芯片;3410、姿态传感器可调底座;3411、航向角单轴传感器芯片;3412、双轴水平姿态角度传感器芯片;3413、俯仰角翻滚角报警灯;3414、航向角红外平行报警灯;3415、微型麦克风;3416、喇叭;3417、倾角航向角俯仰角翻滚角数显屏;3418、红外随动发射/接收基站四;35、语音数控单元;3501、语音数控主板;3502、语音数控主芯片;3503、语音数控主板背面;3504、串口扩展芯片;3505、第一麦克风;3506、第二麦克风;3507、自带串口通信端口的蜂鸟US516P6芯片语音板一;3508、自带串口通信端口的蜂鸟US516P6芯片语音板二;3509、麦克风连接端;3510、红外随动发射/接收基站串口通信接口;3511、DWM1000红外随动板载发射/接收基站;3512、DWM1000红外随动发射/接收基站一;3513、DWM1000红外随动发射/接收基站二;3514、板载串口通信端;3515、外设的自带蓝牙的数控设备主控板;3516、外设的各种数控机器串口通信端;3517、喇叭;3518、喇叭连接端;3519、蜂鸣器连接端;3520、激光传感接受器通信端;3521、姿态角度传感器校准连接端;3522、制导模式设置键盘连接端;3523、倾角航向角俯仰角翻滚角数显屏;3524、数显连接端;3525、人体感应开关;3526、人体感应开关连接端;3527、姿态警灯组;3528、姿态警灯连接端;3529、红外平行校准器连接端;;3530、360°红外激光管连接端;3531、外设模拟端口连接端;3532、主板电源输入连接端;3533、倾角传感器横竖安装方位灯;3534、横竖安装方位灯连接端;3535、航向角红外平行报警灯;3536、航向角红外平行报警灯连接端;3537、数字倾角传感器;3538、数字倾角传感器连接端;3539、双轴水平姿态角度传感器;3540、双轴水平姿态角度传感器连接端;3541、航向角单轴传感器;3542、航向角单轴传感器连接端;3543、双轴水平姿态角度传感器蓝牙通信端;3544、航向角单轴传感器通信端;36、无线蓝牙单元;3601、BLE+SPP双模主从一体蓝牙;3602、外设的各种数控机器双模主从一体蓝牙;3603、传感器双模主从一体蓝牙;37、激光传感接受器;4、数控找平造型及预埋件子系统;41、数控找平标准点桩;42、数控找平平面造型点桩;43、数控找平弧面造型点桩;44、点桩加强筋;45、带安装治具的装配式室内门的预埋挂件;46、轻钢龙骨隔墙天地骨预埋件;47、轻钢龙骨隔墙预埋边龙骨;48、用于装配式墙板的预埋件;5、装配式模块化可伸缩轻钢龙骨隔墙;6、装配式窗套;61、窗台石;6101、窗台石耳朵;62、窗套侧板;63、窗套顶板;7、数控装配式墙板子系统;71、标准装配式墙板套装;7101、标准装配式墙板基板;7102、装配式无底盒插座开口;7103、焊接有双通滚花螺母镶嵌件的金属板;7104、双通滚花螺母镶嵌件孔洞;7105、焊接有定位销的金属拉条;7106、顶底锥形沉头定位销孔洞;7107、侧面定位连接销;7108、基板双侧锥形沉头定位连接销孔洞;7109、基板双侧带倒角的榫头槽口;7110、增强纤维尼龙榫片;7111、深卷至背面的底漆;7112、深卷至背面的热熔胶;7113、深卷至背面的饰面层;72、装配式墙板边缘板;73、平面造型装配式墙板;7301、平面造型装配式面板;7302、平面造型背面收口板;7303、立面造型装配式墙板;7304、立面造型背面收口板;74、弧形造型装配式墙板;7401、弧形造型装配式面板;7402、弧形造型背面收口板;75、窗上口装配式墙板;76、窗台下口装配式墙板;77、装配式踢脚线套装;7701、背面底部加厚的踢脚线;7702、微型千斤顶安装槽;7703、长摇臂微型千斤顶;7704、微型千斤顶六角摇杆;7705、微型千斤顶丝杆;7706、丝杆螺母转接空心六角套筒件;7707、微型千斤顶固定孔;78、数控装配车;7801、数控装配车底板;7802、步进电机麦克纳姆轮;7803、装配车承重中心内筒;7804、装配车承重丝杆方螺母;7805、装配车承重丝杆;7806、承重丝杆轴承;7807、承重丝杆卡簧;7808、承重丝杆联轴器;7809、六零步进电机;7810、承重竖向工业滑轨;7811、带中心外筒的举升平台升降导杆;7812、高精度陀螺仪;7813、带螺母的自动硬调平基座;7814、自动硬调平丝杆;7815、带六角套筒的丝杆;7816、自动硬调平联轴器;7817、硬调平减速步进电机;7818、带中心外筒的举升平台;7819、装配车承重中心外筒;7820、装配车固定叉耙;7821、带红外平行器架的活动叉耙;7822、自带活动轴的横向微导辊;7823、竖向对齐红外感知器;7824、水平对齐红外感知器;7825、数控姿态制导单元安装座;7826、自带直线轴承的举升平台升降导筒;7827、举升平台底板接近开关;7828、接近开关座;7829、六零步进电机驱动器;7830、水平移动步进电机驱动器;7831、装配车主控电路板;7832、横向工业滑轨;7833、水平移动步进电机座;7834、活动叉耙水平移动步进电机;7835、滚珠丝杆螺母;7836、滚珠丝杆螺母连接座;7837、滚珠丝杆;7838、带轴承的滚珠丝杆座;7839、电动吸盘升降导杆;7840、电动吸盘;79、墙面凸点速扫仪;7901、大视角面阵固态激光雷达;7902、凸点速扫仪主板;7903、凸点速扫仪屏幕;7904、凸点速扫仪控制面板;7905、凸点速扫仪外壳;7906、凸点速扫仪通信航插端口;7907、凸点速扫仪电源航插端口;8、带安装治具的装配式室内门;9、装配式无底盒插座;10、数字化装配方法;101、虚拟数字化装配方法、1011、窗面墙墙面;1012、门面墙墙面;1013、门对面墙墙面;1014、窗对面墙墙面;1015、带安装治具的装配式室内门的安装治具;1016、激光数控点桩仪;1017、不带底车的数控红外随动制导车;102、实物数字化装配方法;1021、窗右装配式边缘墙板;1022、窗左装配式边缘墙板;1023、平面和弧形造型装配式墙板右侧尽头边缘板;1024、窗对面近门侧边缘板;1025、门合页侧装配式墙板;1026、门锁侧装配式边缘板;1027、门顶装配式墙板
具体实施方式
下面结合附图和实施例对本发明作进一步的描述,下列实施例仅用于解释本发明的发明内容,不用于限定本发明的保护范围。
本发明提供一种自适应装配式墙面系统,如图1所示,包括原始图纸1、原始房间2、数控红外随动制导子系统3、数控找平造型及预埋件子系统4、装配式模块化可伸缩轻钢龙骨隔墙5、装配式窗套6、数控装配式墙板子系统7、带安装治具的装配式室内门8、装配式无底盒插座9、数字化装配方法10;数控红外随动制导子系统3将原始图纸1投射到原始房间2,数控找平造型及预埋件子系统4在数控红外随动制导子系统3制导下在原始房间2墙面制安点桩、预埋件和装配式模块化可伸缩轻钢龙骨隔墙5,装配式窗套6、数控装配式墙板子系统7、带安装治具的装配式室内门8、装配式无底盒插座9依次按数字化装配方法10完成装配。
数控红外随动制导子系统链接了原始图纸的标准化和原始房间的非标化,数控找平造型及预埋件子系统在数控红外随动制导子系统制导下在原始房间上“长出”了新标准化的面,原始房间立面上的隔墙、门窗、墙板、插座由多款全数字化机器联动在数控红外随动制导子系统制导和原始房间上新“长出”的标准面双重约束下,按照独特的数字化装配方法装配出符合原始图纸标准化的标准化成品,现场无一动锯。
如图2所示,数控红外随动制导子系统3包括数控红外随动制导车31、数控红外角度标尺32、红外平行校准器33、数控姿态制导单元34、语音数控单元35、无线蓝牙单元36、激光传感接受器37;两台对角布置的数控红外随动制导车31与直角布置的数控红外角度标尺32,通过语音数控单元35和无线蓝牙单元36,组网将原始图纸1自适应投射到原始房间2;数控姿态制导单元34经红外平行校准器33校准后,通过语音数控单元35和无线蓝牙单元36,指令激光传感接受器37在数控红外随动制导车31和数控红外角度标尺32组网的制导下,操控原始房间2内所有搭载数控姿态制导单元34的数控机器,按数字化装配方法10完成装配动作。
数控红外随动制导子系统由数控红外随动制导车、数控红外角度标尺两个模块即能数字化地构建原始房间六面体红外制导网,且能使房内任意点受红外制导的红外光接受模块均能得到相同的红外线激光照射功率值;红外平行校准器、激光传感接受器、数控姿态制导单元三个模块放在被制导的机器端,接受制导指挥被控机器调整姿态、执行数字化的指令完成数字化装配方法规定动作;语音数控单元和无线蓝牙单元两模块无线互通连接、无线操作。
如图3所示,数控红外随动制导车31包括360°红外激光水平管3106、360°红外激光竖向管3118、DWM1000红外随动发射/接收基站一3103、DWM1000红外随动发射/接收基站二3104、麦克纳姆轮步进电机小车3101、带强磁底座的步进电机调平台3107、测距模组用步进电机3109、带滑台的步进电机一3116、带滑台的步进电机二3117、双发单收相位式测距模组3110及带蓝牙的主控板3102、中下部步进电机驱动器3105、语音数控单元35、三轴加速度陀螺仪电路板3108、航向角传感器模组3112、上部步进电机驱动器3113;360°红外激光水平管3106、360°红外激光竖向管3118分别与搭载有DWM1000红外随动发射/接收基站一3103的语音数控单元35连接,语音数控单元35接收到搭载有DWM1000红外随动发射/接收基站二3104的外设机器或设备发出的距离远近数值,对应调整360°红外激光水平管3106、360°红外激光竖向管3118发出的红外线激光功率值,确保在原始房间2内该台搭载有DWM1000红外随动发射/接收基站一3103的机器或设备能在任意位置接收到同等照射功率值的红外线;360°红外激光竖向管3118装载在带滑台的步进电机二3117上,带滑台的步进电机二3117连接垂直布置的带滑台的步进电机一3116通过直线轴承3115连接在测距模组上架3111的光轴3114上,双发单收相位式测距模组3110装载在测距模组上架3111底面连接测距模组用步进电机3109,测距模组用步进电机3109装载在带强磁底座的步进电机调平台3107顶面,三轴加速度陀螺仪电路板3108和360°红外激光水平管3106装载在带强磁底座的步进电机调平台3107顶面板的下面,带强磁底座的步进电机调平台3107底板吸附在麦克纳姆轮步进电机小车3101平台上;带蓝牙的主控板3102接受双发单收相位式测距模组3110、三轴加速度陀螺仪电路板3108的实施数据,通过中下部步进电机驱动器3105在保持带强磁底座的步进电机调平台3107顶部水平的同时驱动麦克纳姆轮步进电机小车3101在原始房间2内按数字化装配方法10全向移动,带蓝牙的主控板3102接受航向角传感器模组3112的实施数据,通过上部步进电机驱动器3113驱动测距模组用步进电机3109做Z轴方向的360度旋转、驱动带滑台的步进电机一3116、带滑台的步进电机二3117做X/Y轴方向的微距移动。
数控红外随动制导车数控三个等距朝向靶心的步进电机使360°红外激光管、双发单收相位式测距模组保持高精度的水平;六个方向布置的一体化双发单收相位式测距模组能精确到1mm测量、感知制导车在原始房间的位置,结合麦克纳姆轮车底盘能精确到5mm数控红外制导车按规定方向行驶到数字化施工方法规定的位置,两带滑台的步进电机能将上述5mm的误差补偿到精确到0.1mm,超薄步进电机能使用红外激光管的旋转读书精确到0.1mm。
如图4所示,数控红外角度标尺32包括竖向布置在角度标尺主支架3207直角一端的、成一面的角度校准红外传感器一3208、外传感器二3209、外传感器三3209以及布置在此面两侧的角度引导红外传感器一3211和角度引导红外传感器二3212,角度标尺主支架3207直角的另一端亦按相同方案部署;角度标尺主支架3207下端连接搭设在带陀螺仪的步进电机调平台3201上的主支架步进电机3202,语音数控单元35接收DWM1000红外随动发射/接收基站3206发给数控红外随动制导车31的反馈数据并与高精度航向角传感器3203比对后,在角度引导红外传感器一3211或角度引导红外传感器二3212的引导下,发出指令给带蓝牙带的主控制板3204驱动主支架步进电机3202调整角度标尺主支架3207在Z轴的位置、或发送数据给数控红外随动制导车31,引导、制约数控红外随动制导车31进行微调。
数控红外角度标尺上物理布设垂直的两组六颗角度校准红外传感器,在底座精确调平的基础上,通过角度引导红外传感器的引导,使两台数控红外随动制导车与之能在原始房间内迅速组成基准的红外制导网。
如图5所示,红外平行校准器33包括竖向镶嵌在环形底座3301的九点、十二点、三点呈同一平面的、有红外传感器安装槽3306、红外传感器限光口3307、红外传感器后盖3310的平行校准红外传感器一3309、平行校准红外传感器二3311、平行校准红外传感器三3312,红外传感器硅管3308微嵌入红外传感器限光口3307;平行校准红外传感器一3309、平行校准红外传感器二3311、平行校准红外传感器三3312通过镶嵌在线槽3305内的导线连接pogopin连接器公3302,pogopin连接器公3302对应连接焊接在pogopin连接器转接板3304上的pogopin连接器母3303。
红外平行校准器应用于上述的激光数控点桩仪、数控装配车、语音数控单元、数控姿态制导单元等,红外平行校准器制导运动中的机器机头精确平行于红外制导网,从而启动/限制下一个程序的进行;红外平行校准器亦可用作姿态传感器的加计校准、姿态归零,为运动中的机器行程控制提供数字化支持;pogopin连接器的运用大幅提高其标准、适用性且易于维修更换。
如图6所示,数控姿态制导单元34包括数控姿态底托3401、数控姿态底托上盖3405、数控姿态主板3407、语音数控单元35、双模蓝牙芯片3409、倾角航向角俯仰角翻滚角数显屏3417及数字倾角传感器3404、航向角单轴传感器芯片3412、俯仰角翻滚角报警灯3413、航向角红外平行报警灯3414、微型麦克风3415;数字倾角传感器3404装载在数控姿态底托3401顶部可调底座韧带3403包围的倾角传感器可调底座3402内,装载在数控姿态底托上盖3405侧板上的电源插座3406给数控姿态主板3407和语音数控单元35供电,装载在姿态传感器可调底座3410上的航向角单轴传感器芯片3411、双轴水平姿态角度传感器芯片3412与数字倾角传感器3404、俯仰角翻滚角报警灯3413、航向角红外平行报警灯3414、微型麦克风3415、喇叭3416、倾角航向角俯仰角翻滚角数显屏3417、DWM1000红外随动发射/接收基站3418一起分别连接到语音数控单元35对应的接口,语音数控单元35通过声、光、蓝牙上位机的姿态反馈,向数控姿态主板3407发出指令,数控姿态主板3407再向原始房间2内所有搭载数控姿态制导单元34的数控机器发送有线或无线指令。
数控姿态制导单元着重于各姿态传感器的布局、调平、校准、加计,数控姿态制导单元主要用于链接语音数控单元和语音单元无法操控的运动中的机器、较复杂的多步进电机的联动等,且通过组合解决了普通六轴、九轴一体化陀螺仪或姿态传感器无法克服的磁场较大偏移问题。
如图7所示,语音数控单元35包括语音数控主板3501、语音数控主芯片3502、语音数控主板背面3503、串口扩展芯片3504、第一麦克风3505、第二麦克风3506、自带串口通信端口的蜂鸟US516P6芯片语音板一3507、自带串口通信端口的蜂鸟US516P6芯片语音板二3508及DWM1000红外随动板载发射/接收基站3511、喇叭3517、倾角航向角俯仰角翻滚角数显屏3523、人体感应开关3525、姿态警灯组3527、数字倾角传感器3537、倾角传感器横竖安装方位灯3533、航向角红外平行报警灯3535、双轴水平姿态角度传感器3539、航向角单轴传感器3541和它们的连接端口、通信端口;串口扩展芯片3504通过语音数控主板3501各端口收集的pogopin连接器转接板3304、人体感应开关3525、激光传感接受器37数据传送给语音数控主芯片3502,语音数控主芯片3502一并将板载或BLE+SPP双模主从一体蓝牙3601、外设的各种数控机器双模主从一体蓝牙3602接受到的数字倾角传感器3537、双轴水平姿态角度传感器3539、航向角单轴传感器3541、倾角传感器横竖安装方位灯3533、航向角红外平行报警灯3535数据处理后供喇叭3517、倾角航向角俯仰角翻滚角数显屏3523、姿态警灯组3527以及外设的各种数控机器双模主从一体蓝牙3602、传感器双模主从一体蓝牙3603无线外接的上位机向操控者展示数据和信息;第一麦克风3505、第二麦克风3506接受操控者的语音命令后传递给自带串口通信端口的蜂鸟US516P6芯片语音板一3507、自带串口通信端口的蜂鸟US516P6芯片语音板二3508转化成数字数据后再传递给语音数控主芯片3502,语音数控主芯片3502通过语音数控主板3501上的各连接端口、通信端口,再传递给外设的各种数控机器串口通信端3516或无线传递给外设的自带蓝牙的数控设备主控板3515;语音数控单元35还连接有360°红外激光水平管3106、360°红外激光竖向管3118和DWM1000红外随动板载发射/接收基站3511,DWM1000红外随动板载发射/接收基站3511接收到搭载有DWM1000红外随动发射/接收基站一3512、DWM1000红外随动发射/接收基站二3513的外设机器或设备发出的距离远近数值时,会传递给语音数控主芯片3502对应调整360°红外激光水平管3106、360°红外激光竖向管3118发出的红外线激光功率值,确保在原始房间2内该台搭载有DWM1000红外随动发射/接收基站一3512、DWM1000红外随动发射/接收基站二3513的机器或设备能在任意位置接收到同等照射功率值的红外线。
语音数控单元最大限度确保了数字化机器的精度不受人为因素影响,故语音数控单元必链接多红外随动、多姿态传感器、多蓝牙、多警灯、多上位机连接、红外平行校准器、激光传感接受器、多机器主板等,语音数控单元既有数字化的多串口通信接口也有多模拟接口,语音数控单元自带麦克风、喇叭、离线语音芯片、串口扩展芯片、红外管控制芯片、主控芯片。
如图8所示,数控找平造型及预埋件子系统4包括数控找平标准点桩41、数控找平平面造型点桩42、数控找平弧面造型点桩43、点桩加强筋44、应用于带安装治具的装配式室内门的预埋挂件45、轻钢龙骨隔墙天地骨预埋件46、轻钢龙骨隔墙预埋边龙骨47、用于装配式墙板的预埋件48;点桩加强筋44低于数控找平标准点桩41,数控找平平面造型点桩42高于数控找平标准点桩41,数控找平弧面造型点桩43根据数字化装配方法10的要求呈中轴线最凸起、两边随弧度长度递减至少三列等距布置。
数控找平造型及预埋件子系统是在红外制导网的制导下、语音数控单元、无线蓝牙单元、数控姿态制导单元的控制下用激光数控点桩仪在原始房间墙面粘接出符合原始图纸的标准化新面,或再在新面上简单快速安装各种预埋件,滤去人工的非标化。
如图9所示,装配式窗套6包括设有窗台石耳朵6101的窗台石61、搁置在窗台石61上的呈两侧外边对齐布置的窗套侧板62、搁置在63上两侧同窗台石61外边对齐前面与窗套侧板62前面对齐的窗套顶板63。
装配式窗套是自适应装配式墙面系统观感质量最靓的地方,也是最容易受质疑的地方,且是数字化装配方法中最开始的地方,而且四周均埋设了高精度的数控找平标准点桩,故单独阐述;像机械装配那样高精度装配好了装配式窗套,既能完成后续原始房间的所有数字化装配。
如图10所示,数控装配式墙板子系统7包括标准装配式墙板套装71、装配式墙板边缘板72、平面造型装配式墙板73、弧形造型装配式墙板74、窗上口装配式墙板75、窗台下口装配式墙板76、装配式踢脚线套装77、数控装配车78、墙面凸点速扫仪79;窗上口装配式墙板75宽度等同窗台下口装配式墙板76且在同一平面,平面造型装配式墙板73、弧形造型装配式墙板74与装配式墙板边缘板72同平面连接,平面造型装配式墙板73、弧形造型装配式墙板74立面凸出于标准装配式墙板套装71;数控装配车78在数控红外随动制导子系统3的制导下结合数控找平造型及预埋件子系统4按数字化装配方法10粘接到原始房间2的墙体上。
数控装配式墙板子系统,对装配式墙板的典型样式、搭接、收口、下单、数控装配车装配及踢脚线连接做了梳理和规划,以达到匹配数控装配车按数字化装配方法适用的目的。
如图11所示,标准装配式墙板套装71包括依次粘合的焊接有双通滚花螺母镶嵌件的金属板7103、标准装配式墙板基板7101、深卷至背面的底漆7111、深卷至背面的热熔胶7112、深卷至背面的饰面层7113;焊接有双通滚花螺母镶嵌件的金属板7103的螺母镶嵌在双通滚花螺母镶嵌件孔洞7104中,装配式无底盒插座开口7102贯穿标准装配式墙板套装71,若干基板双侧锥形沉头定位连接销孔洞7108、基板双侧带倒角的榫头槽口7109对称布设在标准装配式墙板套装71的两侧,侧面定位连接销7107一半镶嵌在基板双侧锥形沉头定位连接销孔洞7108中,增强纤维尼龙榫片7110一半镶嵌在基板双侧带倒角的榫头槽口7109中,顶底锥形沉头定位销孔洞7106对称布置在标准装配式墙板套装71的顶底靠近两侧边缘,焊接有定位销的金属拉条7105的定位销完全镶嵌在顶底锥形沉头定位销孔洞7106中。
标准装配式墙板套装用机械制造的方法对墙面板基板与面饰的组成、连接、防裂开,对俩墙面板的连接,对弧形板、造型板、标准板之间的连接做了进一步的深化,确保其易加工、性能稳定、连接牢靠、饰面美观、经久耐用、维修容易、成本低廉且适合数控装配车的装配。
如图12所示,平面造型装配式墙板73、弧形造型装配式墙板74包括背面分别设有平面造型背面收口板7302、立面造型背面收口板7304、弧形造型背面收口板7402的平面造型装配式面板7301、立面造型装配式墙板7303、弧形造型装配式面板7401;平面造型背面收口板7302、立面造型背面收口板7304、弧形造型背面收口板7402距离平面造型装配式面板7301、立面造型装配式墙板7303、弧形造型装配式面板7401两边至少大于80mm呈对称布置。
造型装配式墙板进一步细化了平面造型装配式墙板、弧面造型装配式墙板的细部造型结构及收口处理方式,完善了装配式墙板的常见类型。
如图13所示,装配式踢脚线套装77包括背面底部加厚的踢脚线7701和长摇臂微型千斤顶7703;长摇臂微型千斤顶7703装载在微型千斤顶安装槽7702中通过微型千斤顶固定孔7707固定,丝杆螺母转接空心六角套筒件7706分别连接相邻的两长摇臂微型千斤顶7703的微型千斤顶六角摇杆7704和微型千斤顶丝杆7705。
装配式踢脚线套装重新定义了与装配式墙板底部收口搭接的踢脚线的功能、样式和装配方式,装配式踢脚线套装内置微型摇臂千斤顶,串联后,可为较重的装配式墙板、需要支撑的装配式墙板提供永久性支撑,其微型设计,既能像普通踢脚线一样长度和外形美观,又为装配式墙板的安全保证了提供了更多一种的选择。
如图14所示,数控装配车78包括在数控装配车底板7801上装载有步进电机麦克纳姆轮7802、装配车承重中心内筒7803、装配车承重丝杆方螺母7804、装配车承重丝杆7805、承重丝杆卡簧7807、承重丝杆联轴器7808、承重竖向工业滑轨7810、带中心外筒的举升平台升降导杆7811、带螺母的自动硬调平基座7813、自动硬调平丝杆7814、带六角套筒的丝杆7815、自动硬调平联轴器7816、硬调平减速步进电机7817的下半部和在带中心外筒的举升平台7818上装载有装配车承重中心外筒7819、装配车固定叉耙7820、带红外平行器架的活动叉耙7821、自带活动轴的横向微导辊7822、数控姿态制导单元安装座7825、自带直线轴承的举升平台升降导筒7826、接近开关座7828、横向工业滑轨7832、六零步进电机7809、水平移动步进电机座7833、活动叉耙水平移动步进电机7834、滚珠丝杆螺母7835、滚珠丝杆螺母连接座7836、滚珠丝杆7837、带轴承的滚珠丝杆座7832的上半部;承重竖向工业滑轨7810、带中心外筒的举升平台升降导杆7811分别连接装配车承重中心外筒7819内壁、自带直线轴承的举升平台升降导筒7826、承重丝杆联轴器7808连接六零步进电机7809,装配车主控电路板7831获取数据后驱动步进电机麦克纳姆轮7802使两竖向对齐红外感知器7823与竖向红外激光面重合,装配车主控电路板7831获取高精度陀螺仪7812数据后驱动硬调平减速步进电机7817将数控装配车78调平,装配车主控电路板7831获取水平对齐红外感知器窗对面近门侧边缘板7824数据后通过六零步进电机驱动器7829驱动六零步进电机7809带动装配车承重丝杆7805,驱使带中心外筒的举升平台7818举升至与水平红外激光面重合;自带活动轴的横向微导辊7822上装载标准装配式墙板套装71由电动吸盘升降导杆7839上的电动吸盘7840吸附固定,装配车主控电路板7831驱动活动叉耙水平移动步进电机7834使连接活动叉耙水平移动步进电机7834的滚珠丝杆螺母连接座7836往前推进,连接在数控姿态制导单元安装座7825上的数控姿态制导单元34通过感知红外平行校准器33和激光传感接受器37的设定值与实时获取值的对比,制导带红外平行器架的活动叉耙7821按数字化装配方法10推进至目标定位。
数控装配车步进电机麦克纳姆轮能方便装配完一块墙面板能在保证角度大致不变的前提下迅速后倒退横移进入下次作业准备,其低矮配置能确保其停下来后三个自动硬调平丝杆在调平的同时,能像大吊车在起重前放下平衡支架那样和麦克纳姆轮一起增大稳定性;数控装配车搭载的语音数控单元、无线蓝牙单元、数控姿态制导单元能让数控装配车在红外制导网的制导下,按数字化装配方法标准化地、快速地装配墙板。
如图15所示,墙面凸点速扫仪79包括装载在凸点速扫仪外壳7905内的大视角面阵固态激光雷达7901、凸点速扫仪主板7902、凸点速扫仪屏幕7903、凸点速扫仪控制面板7904;凸点速扫仪通信航插端口7906、凸点速扫仪电源航插端口7907分别连接大视角面阵固态激光雷达7901。
墙面凸点速扫仪的大视角固态激光雷达的应用,能在几分钟内完成找到、标出墙面的最凸点,其精度能达到正负1mm;若要更高的精度,在标出的凸点附近,用改良后的激光传感接受器和红外制导网协同,精度可达0.1mm。
本发明还提供一种应用于自适应装配式墙面系统的数字化装配方法,如图16所示,数字化装配方法10包括虚拟数字化装配方法101和实物数字化装配方法102;虚拟数字化装配方法101自墙面凸点速扫仪79扫描窗面墙墙面1011并装配数控找平标准点桩41至下单完成;墙面凸点速扫仪79搁置在一种应用于带安装治具的装配式室内门的安装治具1015上,分别扫描窗面墙墙面1011、门面墙墙面1012、门对面墙墙面1013、窗对面墙墙面1014,操作者从实时点云中分别圈出窗面墙墙面1011、门面墙墙面1012、门对面墙墙面1013、窗对面墙墙面1014最凸的各两点;数控红外角度标尺32放到窗面墙墙面1011和门对面墙墙面1013交汇处、两数控红外随动制导车31分别放到窗面墙墙面1011和门面墙墙面1012交汇处、门对面墙墙面1013和窗对面墙墙面1014交汇处,操作者发出语音命令让数控红外角度标尺32和两数控红外随动制导车31组四面垂直、底面水平、距离窗面墙墙面1011、门面墙墙面1012、门对面墙墙面1013、窗对面墙墙面1014分别约70mm-110mm的红外线网并启动红外随动功能;激光数控点桩仪1016精确复核窗面墙墙面1011最凸两点并确定一个最凸点后,根据原始图纸1设定窗面墙墙面1011的最短数控找平标准点桩41数值并输入激光数控点桩仪1016,激光数控点桩仪1016在窗面墙墙面1011上模糊作业粘接出N个间距小于500mm的数控找平标准点桩41;激光数控点桩仪1016精确复核门面墙墙面1012、门对面墙墙面1013、窗对面墙墙面1014分别确定各面最凸点且标记后,将激光数控点桩仪1016内置胶棒更换成适用窗洞厚的标尺棒垂直抵住窗框,不带窗台石耳朵6101的窗台石61、窗套侧板62、窗套顶板63的宽度值等于标尺到激光数控点桩仪1016刀口最前端的数值加上激光数控点桩仪1016刀口最前端到刚才输入激光数控点桩仪1016的最短数控找平标准点桩41那个设定点的距离数值加上标准装配式墙板套装71厚度数值的和,将不带底车的数控红外随动制导车1017放入窗面墙墙面1011的窗洞中获取即时数据,综合数据后根据原始图纸1下单窗台石61、窗套侧板62、窗套顶板63的完整数据借助不带底车的数控红外随动制导车1017,模糊作业在窗面墙墙面1011的窗洞四面粘接出N个数控找平标准点桩41;同理将不带底车的数控红外随动制导车1017移至门面墙墙面1012的门洞下单门顶装配式墙板1027、带安装治具的装配式室内门8、应用于带安装治具的装配式室内门的预埋挂件45,然后将数控红外随动制导车1017移回一种应用于带安装治具的装配式室内门的安装治具1015顶上,使一种应用于带安装治具的装配式室内门的安装治具1015的水平激光面举升至原始图纸1设定的标准装配式墙板套装71顶面,根据数控红外随动制导车31测定的原始房间2六面体数据并结合窗台石61、窗套侧板62、窗套顶板63的数据,按原始图纸1的要求分别下单窗上口装配式墙板75、窗台下口装配式墙板76、应用于带安装治具的装配式室内门的预埋挂件44、用于装配式墙板的预埋件48、窗右装配式边缘墙板1021、窗左装配式边缘墙板1022,下单时须满足窗右装配式边缘墙板1021加上窗左装配式边缘墙板1022加上窗上口装配式墙板75加上标准装配式墙板套装71的宽度数值和须小于门面墙墙面1012最凸点至门对面墙墙面1013最凸点距离最小值减去10mm后的差值;同理下单轻钢龙骨隔墙天地骨预埋件46、轻钢龙骨隔墙预埋边龙骨47、装配式模块化可伸缩轻钢龙骨隔墙5、装配式墙板边缘板72、平面造型装配式墙板73、弧形造型装配式墙板74、平面和弧形造型装配式墙板右侧尽头边缘板1023、窗对面近门侧边缘板1024、门合页侧装配式墙板1025、门锁侧装配式边缘板1026、门顶装配式墙板1027、标准装配式墙板套装71、装配式无底盒插座9、装配式踢脚线套装77,下单数值须满足门面墙墙面1012、门对面墙墙面1013上靠窗侧的第一块标准装配式墙板套装71侧面须贴合在窗左装配式边缘墙板1022、窗右装配式边缘墙板1021饰面面上,同时须满足对面墙墙面1014上临近平面和弧形造型装配式墙板右侧尽头边缘板1023的标准装配式墙板套装71侧面须贴合在平面和弧形造型装配式墙板右侧尽头边缘板1023饰面面上、门合页侧装配式墙板1025侧面须贴合在窗对面近门侧边缘板1024饰面面上且门合页侧装配式墙板1025数值小于窗面墙墙面1011最凸点至窗对面墙墙面1014最凸点距离最小值减去门顶装配式墙板1027宽度值再减去门锁侧装配式边缘板1026宽度值再减去N个标准装配式墙板套装71宽度值再减去标准装配式墙板套装71厚度值再减去窗对面墙墙面1014上最短数控找平标准点桩41值再减去10mm;实物数字化装配方法102包括激光数控点桩仪1016、一种应用于带安装治具的装配式室内门的安装治具1015、数控装配车78在数控红外随动制导子系统3的制导下,完成数控找平造型及预埋件子系统4的点桩和预埋件、装配式模块化可伸缩轻钢龙骨隔墙5、装配式窗套6、数控装配式墙板子系统7的饰面层、带安装治具的装配式室内门8、装配式无底盒插座9的数字化装配;窗台石61、窗套侧板62、窗套顶板63背面模糊作业点涂免钉胶其余满涂聚氨酯泡沫胶抵住窗框内侧自下而上粘贴到窗洞上,然后对齐窗套顶板63侧面将装配式墙板75、窗台下口装配式墙板76下上抵住装配式窗套6顶底模糊作业粘贴到窗面墙墙面1011上;数控红外角度标尺32放到窗面墙墙面1011和门对面墙墙面1013交汇处、两数控红外随动制导车31分别放到窗面墙墙面1011和门面墙墙面1012交汇处、门对面墙墙面1013和窗对面墙墙面1014交汇处,操作者发出语音命令让数控红外角度标尺32的角度标尺主支架3207直角右板搭载的角度校准红外传感器一3208、角度校准红外传感器二(3209、角度校准红外传感器三3210物理平行或借用激光数控点桩仪1016使之平行于窗套顶板63内边,然后锁定角度标尺主支架3207使之不再转动、语音命令两数控红外随动制导车31与数控红外角度标尺32组四面垂直、底面水平、距离窗面墙墙面1011、门面墙墙面1012、门对面墙墙面1013、窗对面墙墙面1014分别约70mm-110mm的红外线制导网并启动红外随动功能;根据原始图纸1、在数控红外随动制导子系统3的红外制导网制导下模糊作业门面墙墙面1012、门对面墙墙面1013的数控找平标准点桩41、数控找平平面造型点桩42、数控找平弧面造型点桩43,预埋点桩加强筋44、轻钢龙骨隔墙天地骨预埋件46、轻钢龙骨隔墙预埋边龙骨47、用于装配式墙板的预埋件48,装配装配式模块化可伸缩轻钢龙骨隔墙5;将数控装配车78的带红外平行器架的活动叉耙7821朝向、平行于窗台下口装配式墙板76、数控装配车78左侧的步进电机麦克纳姆轮7802边重叠窗台下口装配式墙板76的边放置在地面后语音命令数控装配车78“装配校准”,带中心外筒的举升平台7818降至举升平台底板接近开关7827接近数控装配车底板7801、带红外平行器架的活动叉耙7821收至贴合装配车承重中心外筒7819后步进电机麦克纳姆轮7802先横向始离距窗台下口装配式墙板76边约下一个欲装配的窗上口装配式墙板75二分之一宽值后,竖向驶向窗面墙墙面1011,竖向对齐红外感知器7823引导数控装配车78与窗面墙墙面1011侧的红外制导网立面红外线重叠时,数控装配车78停止行驶并调平,调平完成带中心外筒的举升平台7818升高至窗对面近门侧边缘板7824与红外制导网水平红外线重叠后,自动数控升降至原始图纸1高度,搭载红外平行校准器33的带红外平行器架的活动叉耙7821自动伸出触碰到红外制导网立面红外线设定零点后带红外平行器架的活动叉耙7821自动缩回归为完成校准;将标准装配式墙板套装71垂直居中搁置在自带活动轴的横向微导辊7822上由电动吸盘7840吸住,活动叉耙水平移动步进电机7834驱动装配车固定叉耙7820上的标准装配式墙板套装71移至与窗台下口装配式墙板76同平面时,将连接在标准装配式墙板套装71背面焊接有双通滚花螺母镶嵌件的金属板7103上的用于装配式墙板的预埋件48公卡拍入预埋在窗面墙墙面1011上的用于装配式墙板的预埋件48母卡中,然后将预插在标准装配式墙板套装71侧面的增强纤维尼龙榫片7110侧面定位连接销7107分别对准窗上口装配式墙板75窗台下口装配式墙板76对应的孔槽,侧推标准装配式墙板套装71插入对应的孔槽,最后将预插在标准装配式墙板套装71顶底的焊接有定位销的金属拉条7105上的定位销分别插入窗上口装配式墙板75窗台下口装配式墙板76对应的孔槽完成两块板的连接;重复命令数控装配车78“校准装配”,数控装配车78将重复上一组动作同理进行下一快标准装配式墙板套装71的装配;窗面墙墙面1011装配完成后,门对面墙墙面1013近窗的第一块标准装配式墙板套装71侧面紧贴窗右装配式边缘墙板1021饰面装配,依次完成平面造型装配式墙板73装配式墙板边缘板72平面和弧形造型装配式墙板右侧尽头边缘板1023的装配;门面墙墙面1012近窗的第一块标准装配式墙板套装71侧面紧贴窗左装配式边缘墙板1022饰面装配,依次完成门锁侧装配式边缘板1026门顶装配式墙板1027的装配并试拼装1025;确定窗对面墙墙面1014到门合页侧装配式墙板1025近窗对面墙墙面1014侧边的最短数控找平标准点桩41并通过激光传感接受器37设置好激光数控点桩仪1016后,取下门合页侧装配式墙板1025在窗对面墙墙面1014上模糊作业粘接出N个数控找平标准点桩41,窗对面墙墙面1014近平面和弧形造型装配式墙板右侧尽头边缘板1023的第一块标准装配式墙板套装71侧面紧贴平面和弧形造型装配式墙板右侧尽头边缘板1023饰面装配,直至窗对面近门侧边缘板1024装配、门合页侧装配式墙板1025侧面紧贴窗对面近门侧边缘板1024饰面装配完成;在带安装治具的装配式室内门8的顶门套两边与门顶装配式墙板1027两边对齐的前提下,调节应用于带安装治具的装配式室内门的预埋挂件45,装配带安装治具的装配式室内门8;依次装配门对面墙墙面1013、窗对面墙墙面1014、门面墙墙面1012近窗边、窗面墙墙面1011右窗边的装配式踢脚线套装77并顶举长摇臂微型千斤顶7703至设定的微力矩后,将不含长摇臂微型千斤顶7703的装配式踢脚线套装77粘贴到窗台下口装配式墙板76、门合页侧装配式墙板1025下收口;最后将装配式无底盒插座9连接接头卡到装配式无底盒插座开口7102完成原始房间2内的所有装配。
数字化装配方法分两个时段,虚拟数字化装配方法和实物数字化装配方法;虚拟数字化装配方法即在下单时段即构建好原始房间如何按照原始图纸在现场不动锯不用技工的前提下如何构建红外制导网、如何预埋预埋件预粘各种数字化点桩、如何下单每一块的装配式墙板的尺寸、如何对缝如何收口、如何和地脚线搭接、如何和室内门完美结合、如何用各种数字化机器去安装,相当于虚拟地用数字化机器在红外制导网的制导下完整安装了一遍;第二时段的实物数字化装配方法首先装配好装配式窗套去作为红外制导网重复定位的基面去布设红外制导网,然后用数字化机器按窗面墙墙面、门面墙墙面、门对面墙墙面顺序去布设预埋件和点桩、装配饰面,然后再布设窗对面墙墙面的点桩和装配饰面,然后门合页后的饰面板收口墙面,完成后装配装配式室内门预埋件、先安合页门套,再关上门比照门安装其余的五片门套,最后完成装配式踢脚线、装配式插座转配即可;这两段数字化装配方法与自适应装配式墙面系统的完美结合,将“新能源汽车总装车间”的理念降维运用到了室内墙面系统,用多款全数字化的机器在红外随动制导网的指导下,装配出趋向完美的墙饰面,解决了目前的装配式装修产业工人短缺、技工技术参差不齐、智能机器非全数字化致装配的面层不抵传统施工的精美、现场频繁动锯、装配后还未达到全面标准化等短板。
已经描述了主题的特定实施方式。其他实施方式在以下权利要求的范围内。例如,在权利要求中记载的活动可以以不同的顺序执行并且仍旧实现期望的结果。作为一个实例,为了实现期望的结果,附图中描述的处理不必须要求示出的特定顺序或者顺序次序。在特定实现中,多任务处理和并行处理可以是有优势的。