一种牵引系统电路及其供电模式切换方法
文献发布时间:2024-01-17 01:27:33
技术领域
本申请涉及城轨车辆牵引系统技术领域,尤其涉及一种牵引系统电路及其供电模式切换方法。
背景技术
有轨电车是当今世界上发展最为迅猛的轨道交通形式,具有运量大、成本低、污染小、能耗少、准点运行、安全性高、造型美观等优点,是市区交通、城乡轨交和景点的重要载体。
有轨电车运营线路灵活,不需要地面高架封闭线路,也不需要地下隧道,沿城市主干道、人口密集区、城乡联运主干道、景点旅游线路等运营。有轨电车线路与市内道路有很多平交路口,可采用独立路权和混合路权,而郊区线路的交叉路口相对较少。因地面线路复杂,同时由于城市美观的需要,有轨电车在平交路口密集区多采用车载储能系统供电即无网区,如动力电池或超级电容等,而在非重点区域采用架空网的方式供电,即有网区。
有网区内,电网给通过受电弓给车辆牵引系统、辅助电源系统供电,同时,储能系统容量不足时也通过充电设备从电网取电充电,以满足无网区运营用电需求。无网区段,受电弓脱离供电网,车辆牵引系统、辅助电源系统转为车载储能系统供电,储能系统可以是锂电池、超级电容等,由于能量限制,车辆可减载运行。车载储能系统供电和电网供电的切换是新能源车辆的重点和难点。
常用的新能源车辆电路拓扑如图1所示。现有的拓扑结构和切换方式存在以下缺点:集成度低,需要采用单独的双向DC/DC变换设备,且变换器独立于储能系统和牵引系统,DC/DC控制器、BMS、TCU之间互连线复杂,无法进行可靠的一体化控制;车辆转换供电模式前,牵引系统、辅助电源系统高压电源断点停机,切换完成后重新运行,车辆动力性能受到限制,车载空调等停机影响乘客舒适度;受电弓需要降弓,可能会存在拉弧等损伤受电弓和接触网,影响寿命,频繁的VVVF预充电动作增加了系统的故障率,降低了接触器寿命;现有技术提出了进网和离网方法,只提出了进出时序并未有实质性方法,仅有的降功运行在实际运行中也有诸多限制,且存在电网和电池电压差较大造成冲击、短路等事故的风险。
现行的新能源车辆供电模式转换技术有其局限性,限制了新能源系统在轨道交通的进一步推广,DCDC变换器和VVVF无法有效形成整体,切换时的供电中断影响列车动力和乘客舒适性,频繁的开关动作降低了器件的使用寿命,部分无缝切换方法并不能解决现有问题。
因此,一种有效解决有轨电车储能系统和电网供电无缝切换的方法变得更加迫切。
发明内容
本申请实施例提供了一种牵引系统电路及其供电模式切换方法,以至少解决了牵引系统集成度低、车辆供电模式切换使车辆动力性能受到限制、系统故障率高及接触器寿命低等问题。
本发明提供了一种牵引系统电路及其供电模式切换方法,所述牵引系统电路包括:
高压箱,所述高压箱包括KMM接触器;
牵引变流器模块,所述牵引变流器模块一端与所述KMM接触器连接,所述牵引变流器模块包括DC/DC斩波模块及逆变器模块,所述DC/DC斩波模块集成到所述逆变器模块;
TCU牵引控制器,所述TCU牵引控制器分别与所述牵引变流器模块、所述高压箱连接,所述TCU牵引控制器检测高压箱数据及牵引变流器模块数据,根据所述高压箱数据及所述牵引变流器模块数据调整所述KMM接触器状态;
车载储能模块,与所述DC/DC斩波模块连接;
车辆从有网区进入无网区时,所述DC/DC斩波模块根据车辆状态转换成BOOST状态或BUCK状态,电网和所述车载储能模块并行给所述车辆供电,所述TCU牵引控制器根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述牵引变流器模块数据是否过零点后,根据判断结果控制所述KMM接触器使其打开后,所述电网供电中断,车载储能模块继续给所述车辆供电;
所述车辆从所述无网区进入所述有网区时,所述DC/DC斩波模块根据所述车辆状态转换成BOOST状态或BUCK状态,所述车载储能模块给所述车辆供电,所述TCU牵引控制器根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述牵引变流器模块数据与所述高压箱数据是否过所述零点后,根据判断结果控制所述KMM接触器使其闭合后,所述车载储能模块供电中断,所述电网给所述车辆供电。
上述的牵引系统电路中,所所述高压箱还包括:
受电弓电压传感器TV0,所述受电弓电压传感器TV0与所述KMM接触器连接,所述TV0传感器采集所述高压箱数据,并将所述高压箱数据传输到所述TCU牵引控制器,所述TCU牵引控制器将所述高压箱数据传输到所述牵引变流器模块,其中,所述高压箱数据包括受电弓电压up。
上述的牵引系统电路中,所述牵引变流器模块还包括:
网流传感器TA,所述网流传感器TA采集第一牵引变流器模块数据,所述第一牵引变流器模块数据包括电网电流实际值in;
网压传感器TV1,所述网压传感器TV1与所述网流传感器TA的一端连接,所述网压传感器TV1采集第二牵引变流器模块数据,所述第二牵引变流器模块数据包括所述FC电压实际值ufc与所述电网电压实际值un。
上述的牵引系统电路中,所述DC/DC斩波模块包括:
电流传感器CH,所述电流传感器CH采集第三牵引变流器数据,其中,所述第三牵引变流器数据包括蓄电池电流ib。
上述的牵引系统电路中,所述DC/DC斩波模块还包括DC/DC驱动器、电流内环控制器、电压控制外环、电流控制外环及状态转换开关;
模式开关S2及目标电压选择开关S3;
其中,所述电流内环控制器的一端设有所述DC/DC工作模式开关S1,所述电流内环控制器的另一端设有外环控制模式开关S2,所述电流控制外环设有所述目标电压选择开关S3。
本发明还提供供电模式切换方法,所述供电模式切换方法包括:
电网供电模式切换成储能系统供电模式步骤:车辆从有网区进入无网区时,所述车辆收到有网区进入无网区信号后,根据车辆状态,将DC/DC驱动器状态转换为BOOST状态或BUCK状态后,根据基于目标电流和斜坡函数的双闭环控制算法判断电网电流实际值in是否过零点,所述TCU牵引控制器根据第一判断结果控制KMM接触器使其打开后,完成由电网供电模式到储能系统供电模式的转换;
储能系统供电模式切换成电网供电模式步骤:车辆从所述无网区进入所述有网区时,所述车辆收到无网区进入有网区信号后,根据基于目标电流和斜坡函数的双闭环控制算法判断第二牵引变流器模块数据与受电弓电压up的目标电压差是否过所述零点,所述TCU牵引控制器根据第二判断结果控制KMM接触器使其闭合后,根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述电网电流实际值in是否过所述零点,所述TCU牵引控制器根据第三判断结果将所述DC/DC驱动器状态转换为所述BUCK状态后,完成由所述储能系统供电模式到所述电网供电模式的转换。
上述的供电模式切换方法中,所述电网供电模式切换成储能系统供电模式步骤还包括:
当所述车辆状态为牵引状态或惰性状态时,所述KMM接触器闭合,所述TCU牵引控制器通过DC/DC工作模式开关S1将所述DC/DC驱动器状态转换为所述BOOST状态、通过外环控制模式开关S2启用电压控制外环、通过目标电压选择开关S3将稳定阶段的目标电压设置为额定电压后,根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述电网电流实际值in是否过所述零点,所述TCU牵引控制器根据所述第一判断结果控制KMM接触器使其打开后,完成由所述电网供电模式到所述储能系统供电模式的转换。
上述的供电模式切换方法中,所述电网供电模式切换成储能系统供电模式步骤还包括:
当所述车辆状态为制动状态时,所述KMM接触器闭合,所述TCU牵引控制器通过所述DC/DC工作模式开关S1将所述DC/DC驱动器状态转换为所述BUCK状态、通过所述外环控制模式开关S2启用所述电流控制外环、通过所述目标电压选择开关S3将所述稳定阶段的目标电压设置为所述额定电压后,根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述电网电流实际值in是否过所述零点,所述TCU牵引控制器根据第三判断结果通过所述DC/DC工作模式开关S1将所述DC/DC驱动器状态转换为所述BOOST状态、通过所述外环控制模式开关S2启用所述电压控制外环后,控制KMM接触器使其打开后,完成由所述电网供电模式到所述储能系统供电模式的转换。
上述的供电模式切换方法中,所述储能系统供电模式切换成电网供电模式步骤还包括:
当所述车辆状态为牵引状态或惰性状态时,所述KMM接触器打开,所述TCU牵引控制器通过所述DC/DC工作模式开关S1将所述DC/DC驱动器状态转换为所述BOOST状态、通过所述外环控制模式开关S2采用所述电压控制外环、通过所述目标电压选择开关S3采用受电弓电压up作为目标跟随电压,根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述第二牵引变流器模块数据与所述受电弓电压up的目标电压差是否过所述零点,所述TCU牵引控制器根据所述第二判断结果控制KMM接触器使其闭合后,根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述电网电流实际值in是否过所述零点,所述TCU牵引控制器根据第三判断结果将所述DC/DC驱动器状态转换为所述BUCK状态后,完成由所述储能系统供电模式到所述电网供电模式的转换。
上述的供电模式切换方法中,所述储能系统供电模式切换成电网供电模式步骤还包括:
当所述车辆状态为所述制动状态时,通过所述DC/DC工作模式开关S1将所述DC/DC驱动器转换为所述BUCK状态、通过所述外环控制模式开关S2采用所述电流控制外环、通过所述目标电压选择开关S3采用受电弓电压up作为目标跟随电压,根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述第二牵引变流器模块数据与所述受电弓电压up的目标电压差是否过所述零点,所述TCU牵引控制器根据所述第二判断结果控制KMM接触器使其闭合后,根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述电网电流实际值in是否过所述零点,所述TCU牵引控制器根据所述第三判断结果将所述DC/DC驱动器状态转换为所述BOOST状态,完成由所述储能系统供电模式到所述电网供电模式的转换。
相比于相关技术,本发明提出的一种牵引系统电路及其供电模式切换方法,深入分析现阶段混合供电列车的特点,提出了集成式新能源牵引系统电气拓扑,在现有技术中具有更优的集成度;本发明充分考虑车辆运行特性,创造性提出了各状态下列车供电模式无缝切换方法,对列车性能影响降到了最低;根据车辆运行状态和电源无缝切换特征,提出了基于目标模式的电流/电压双环控制算法,统筹牵引系统、DC/DC、储能系统、车辆状体为一体实现了整体控制;考虑到切换时系统稳定性,提出了改善电流冲击的切换方法,利用斜坡函数在有效时间内使目标电流越过零点。
本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
附图说明
此处所说明的附图用来提供对本申请的进一步理解,构成本申请的一部分,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中:
图1是根据本申请实施例的现有技术新能源车辆电路拓扑;
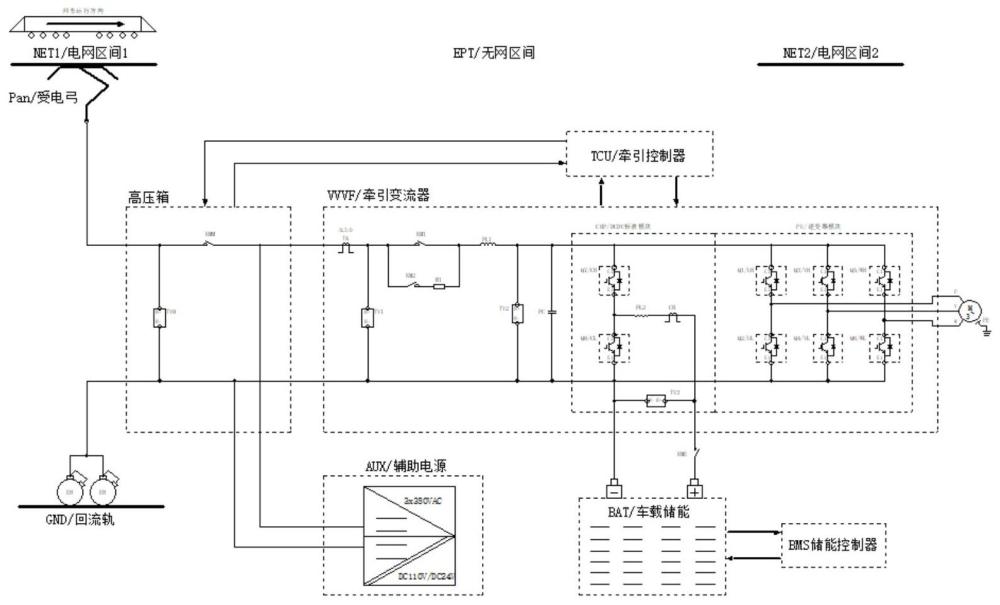
图2是根据本申请实施例的集成式牵引系统电路拓扑;
图3是根据本申请实施例的基于目标电流和斜坡函数的双闭环控制算法控制流程图;
图4是根据本申请实施例的有网区进无网区切换策略流程图;
图5是根据本申请实施例的无网区进入有网区切换策略流程图;
图6是根据本申请实施例的电流斜坡控制函数显示图;
图7是根据本申请实施例的有网区进入无网区牵引状态时状态开关转换逻辑图;
图8是根据本申请实施例的有网区进入无网区制动状态时状态开关转换逻辑图;
图9是根据本申请实施例的无网区进入有网区牵引状态时状态开关转换逻辑图;
图10是根据本申请实施例的无网区进入有网区制动状态时状态开关转换逻辑图。
其中,附图标记为:
TV0:电网电压传感器;
TA1:网流传感器;
KM1:主隔离接触器;
KMQ:IGBT电子开关;
FL:滤波电抗器;
FC:滤波支撑电容;
TV1:FC电容电压传感器;
CTU:U相电流传感器;
CTW:W相电流传感器;
M:牵引电机。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行描述和说明。应当理解,此处所描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。基于本申请提供的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本申请保护的范围。
显而易见地,下面描述中的附图仅仅是本申请的一些示例或实施例,对于本领域的普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图将本申请应用于其他类似情景。此外,还可以理解的是,虽然这种开发过程中所作出的努力可能是复杂并且冗长的,然而对于与本申请公开的内容相关的本领域的普通技术人员而言,在本申请揭露的技术内容的基础上进行的一些设计,制造或者生产等变更只是常规的技术手段,不应当理解为本申请公开的内容不充分。
在本申请中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本申请的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域普通技术人员显式地和隐式地理解的是,本申请所描述的实施例在不冲突的情况下,可以与其它实施例相结合。
除非另作定义,本申请所涉及的技术术语或者科学术语应当为本申请所属技术领域内具有一般技能的人士所理解的通常意义。本申请所涉及的“一”、“一个”、“一种”、“该”等类似词语并不表示数量限制,可表示单数或复数。本申请所涉及的术语“包括”、“包含”、“具有”以及它们任何变形,意图在于覆盖不排他的包含;例如包含了一系列步骤或模块(单元)的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可以还包括没有列出的步骤或单元,或可以还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。本申请所涉及的“连接”、“相连”、“耦接”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电气的连接,不管是直接的还是间接的。本申请所涉及的“多个”是指两个或两个以上。“和/或”描述关联对象的关联关系,表示可以存在三种关系,例如,“A和/或B”可以表示:单独存在A,同时存在A和B,单独存在B这三种情况。字符“/”一般表示前后关联对象是一种“或”的关系。本申请所涉及的术语“第一”、“第二”、“第三”等仅仅是区别类似的对象,不代表针对对象的特定排序。
本发明提出一种牵引系统电路及其供电模式切换方法,以至少解决了牵引系统集成度低、车辆供电模式切换使车辆动力性能受到限制、系统故障率高及接触器寿命低等问题。
下面将以牵引系统电路及其供电模式切换方法为例对本申请实施例进行说明。
实施例一
本实施例提供了一种牵引系统电路。请参照图2,图2是根据本申请实施例的集成式牵引系统电路拓扑,如图2所示,牵引系统电路包括:
高压箱,高压箱包括KMM接触器;
牵引变流器模块,牵引变流器模块一端与KMM接触器连接,牵引变流器模块包括DC/DC斩波模块及逆变器模块,DC/DC斩波模块集成到逆变器模块;
TCU牵引控制器,TCU牵引控制器分别与牵引变流器模块、高压箱连接,TCU牵引控制器检测高压箱数据及牵引变流器模块数据,根据高压箱数据及牵引变流器模块数据调整KMM接触器状态;
车载储能模块,与DC/DC斩波模块连接;
车辆从有网区进入无网区时,DC/DC斩波模块根据车辆状态转换成BOOST状态或BUCK状态,电网和车载储能模块并行给车辆供电,TCU牵引控制器根据基于目标电流和斜坡函数的双闭环控制算法判断牵引变流器模块数据是否过零点后,根据判断结果控制KMM接触器使其打开后,电网供电中断,车载储能模块继续给车辆供电;
车辆从无网区进入有网区时,DC/DC斩波模块根据车辆状态转换成BOOST状态或BUCK状态,车载储能模块给车辆供电,TCU牵引控制器根据基于目标电流和斜坡函数的双闭环控制算法判断牵引变流器模块数据与高压箱数据是否过零点后,根据判断结果控制KMM接触器使其闭合后,车载储能模块供电中断,电网给车辆供电。
在实施例中,高压箱还包括:
受电弓电压传感器TV0,受电弓电压传感器TV0与KMM接触器连接,TV0传感器采集高压箱数据,并将高压箱数据传输到TCU牵引控制器,TCU牵引控制器将高压箱数据传输到牵引变流器模块,其中,高压箱数据包括受电弓电压up。
在实施例中,牵引变流器模块还包括:
网流传感器TA,网流传感器TA采集第一牵引变流器模块数据,第一牵引变流器模块数据包括电网电流实际值in;
网压传感器TV1,网压传感器TV1与网流传感器TA的一端连接,网压传感器TV1采集第二牵引变流器模块数据,第二牵引变流器模块数据包括FC电压实际值ufc与电网电压实际值un。
在实施例中,DC/DC斩波模块包括:
电流传感器CH,电流传感器CH采集第三牵引变流器数据,其中,第三牵引变流器数据包括蓄电池电流ib;
DC/DC斩波模块还包括DC/DC驱动器、电流内环控制器、电压控制外环、电流控制外环及状态转换开关;
其中,状态转换开关包括DC/DC工作模式开关S1、外环控制模式开关S2及目标电压选择开关S3;
其中,电流内环控制器的一端设有DC/DC工作模式开关S1,电流内环控制器的另一端设有外环控制模式开关S2,电流控制外环设有目标电压选择开关S3。
在具体实施例中,如图2所示,牵引系统电路将由IGBT Q7、Q8、FL2构成双向BUCK/BOOST电路,DC/DC和牵引三相逆变器集成到一个功率模块,共同由TCU控制;
高压箱由受电弓电压传感器TV0、母线接触器KMM等组成,是由TCU控制;
牵引变流器模块即VVVF由网流传感器TA、网压传感器TV1、隔离接触器KM1、预充电接触器KM2、预充电电阻R1、FC电压传感器TV2、线路滤波电抗器FL1、支撑滤波电容FC、BUCK/BOOST斩波电路、储能电抗器FL2、储能电池电压传感器TV2、三相逆变器、控制器TCU等部件组成;
其中,TCU将高压箱、DCDC、逆变器作为一个整体控制,实现更高效安全的供电切换、储能系统充放电控制、牵引传动控制,具备了实施高效的一体化控制策略的硬件条件。
本发明车辆供电有两种制式,电网通过受电弓给牵引系统供电,额定电压为Un,波动范围0.7Un~1.3Un,储能单元(电压范围0.2Un~0.6Un)通过集成在牵引逆变器的DC/DC稳定输出电压。
实施例二
请参照图3至图6,图3是根据本申请实施例的基于目标电流和斜坡函数的双闭环控制算法控制流程图;图4是根据本申请实施例的有网区进无网区切换策略流程图;图5是根据本申请实施例的无网区进入有网区切换策略流程图;图6是根据本申请实施例的电流斜坡控制函数显示图。如图3至图6所示,发明的供电模式切换方法,适用于上述的高压电路系统,供电模式切换方法包括:
电网供电模式切换成储能系统供电模式步骤:车辆从有网区进入无网区时,车辆收到有网区进入无网区信号后,根据车辆状态,将DC/DC驱动器状态转换为BOOST状态或BUCK状态后,根据基于目标电流和斜坡函数的双闭环控制算法判断电网电流实际值in是否过零点,TCU牵引控制器根据第一判断结果控制KMM接触器使其打开后,完成由电网供电模式到储能系统供电模式的转换;
储能系统供电模式切换成电网供电模式步骤:车辆从无网区进入有网区时,车辆收到无网区进入有网区信号后,根据基于目标电流和斜坡函数的双闭环控制算法判断第二牵引变流器模块数据与受电弓电压up的目标电压差是否过零点,TCU牵引控制器根据第二判断结果控制KMM接触器使其闭合后,根据基于目标电流和斜坡函数的双闭环控制算法判断电网电流实际值in是否过零点,TCU牵引控制器根据第三判断结果将DC/DC驱动器状态转换为BUCK状态后,完成由储能系统供电模式到电网供电模式的转换。
在实施例中,电网供电模式切换成储能系统供电模式步骤还包括:
当车辆状态为牵引状态或惰性状态时,KMM接触器闭合,TCU牵引控制器通过DC/DC工作模式开关S1将DC/DC驱动器状态转换为BOOST状态、通过外环控制模式开关S2启用电压控制外环、通过目标电压选择开关S3将稳定阶段的目标电压设置为额定电压后,根据基于目标电流和斜坡函数的双闭环控制算法判断电网电流实际值in是否过零点,TCU牵引控制器根据第一判断结果控制KMM接触器使其打开后,完成由电网供电模式到储能系统供电模式的转换;
当车辆状态为制动状态时,KMM接触器闭合,TCU牵引控制器通过DC/DC工作模式开关S1将DC/DC驱动器状态转换为BUCK状态、通过外环控制模式开关S2启用电流控制外环、通过目标电压选择开关S3将稳定阶段的目标电压设置为额定电压后,根据基于目标电流和斜坡函数的双闭环控制算法判断电网电流实际值in是否过零点,TCU牵引控制器根据第三判断结果通过DC/DC工作模式开关S1将DC/DC驱动器状态转换为BOOST状态、通过外环控制模式开关S2启用电压控制外环后,控制KMM接触器使其打开后,完成由电网供电模式到储能系统供电模式的转换。
在具体实施中,从有网区NET1进入无网区EPT,转换前车辆为电网供电的初始状态,接触器KMM、KM1、KME闭合,车辆处于牵引、惰行、制动状态中的一种,网流TA随车辆状态不同为正、负或无网流;从无网区EPT进入有网区NET2。转换前车辆为电池供电的初始状态,接触器KMM打开、KM1、KME闭合,车辆处于牵引、惰行、制动状态中的一种,电池电流CH随车辆状态不同为正、负或无流,TV0实时监控受电弓电压。
如图4所示,电网供电模式切换成储能系统供电模式流程步骤为如下:
步骤1:车辆从有网区进入无网区时,车辆收到有网区进入无网区信号后,根据车辆状态,将DC/DC驱动器状态转换为BOOST状态或BUCK状态,若车辆状态为牵引或惰性状态,则将DC/DC驱动器状态转换为BOOST状态,若车辆状态为制动状态,则将DC/DC驱动器状态转换为BUCK状态;
步骤2:根据基于目标电流和斜坡函数的双闭环控制算法判断电网电流实际值in是否过零点,车辆状态为牵引或惰性状态时,若过了零点,则TCU牵引控制器控制KMM接触器使其打开后,完成由电网供电模式到储能系统供电模式的转换,车辆状态为制动状态时,将DC/DC驱动器状态转换为BOOST状态,控制KMM接触器使其打开后,完成由电网供电模式到储能系统供电模式的转换。
如图5所示,储能系统供电模式切换成电网供电模式流程步骤为如下:
步骤1:车辆从无网区进入有网区时,车辆收到无网区进入有网区信号后,根据车辆状态,将DC/DC驱动器状态转换为BOOST状态或BUCK状态,若车辆状态为牵引或惰性状态,则将DC/DC驱动器状态转换为BOOST状态,若车辆状态为制动状态,则将DC/DC驱动器状态转换为BUCK状态;
步骤2:当车辆处于牵引或惰性状态时,根据以FC电压/TV1网压为目标的DC/DCBOOST状态正向输出控制策略判断第二牵引变流器模块数据与受电弓电压up的目标电压差是否过零点,当车辆处于制动状态时,根据以FC电压/TV1网压为目标的DC/DC BUCK状态反向输出控制策略判断第二牵引变流器模块数据与受电弓电压up的目标电压差是否过零点;
步骤3:若过了零点,则TCU牵引控制器根据控制KMM接触器使其闭合;
步骤4:根据基于目标电流和斜坡函数的双闭环控制算法判断电网电流实际值in是否过零点,车辆状态为牵引或惰性状态时,若过了零点,TCU牵引控制器将DC/DC驱动器状态转换为BUCK状态后,完成由储能系统供电模式到电网供电模式的转换,车辆状态为制动状态时,将DC/DC驱动器状态转换为BOOST状态后,完成由储能系统供电模式到电网供电模式的转换;
其中,DC/DC为双向非隔离变换器,BUCK降压时,可以从电网取电给电池充电,BOOST升压将电池的低压转换为VVVF/牵引变流器和AUX/辅助电源可接收的高压,主要的控制参变量为电池电流CH、电池电压TV3和储能输出电压即FC电压TV2。
基于目标电流和斜坡函数的双闭环控制算法,作用是控制目标电流TA,从有网区进入无网区,通过控制目标电流的斜坡函数使得TA逐渐降低到0,实现电网零电流平滑无冲击过度到电池供电、负载供电不中断;
以FC电压/TV1网压为目标的DCDC BOOST状态正向输出控制策略,即基于目标斜坡函数电压的双环控制算法,控制FC电压/TV1网压与受电弓电压TV0的电压差值-ΔU以内,即TV1网压小于TV0受电弓电压以防止电池能量倒灌到电网,ΔU设为40V即可满足要求;
以FC电压/TV1网压为目标的DCDC BUCK状态输入反向控制策略,,即基于目标斜坡函数电压的双环控制算法,本策略不是控制BUCK状态下的输出电压,而是通过控制电池的充电能量达到FC电压/TV1网压抬升或降低的目的,当电池充电能量高于再生制动能量时,FC电压/TV1网压降低,当电池充电能量小于再生制动能量时,FC电压/TV1网压抬升。通过该策略,控制FC电压/TV1网压与受电弓电压TV0的电压差值-ΔU以内,即TV1网压小于TV0受电弓电压以防止电池能量倒灌到电网,ΔU设为40V即可满足要求。
如图3所示,图3是根据本申请实施例的基于目标电流和斜坡函数的双闭环控制算法控制流程图;
DC/DC控制是实现电源切换的核心,TCU在执行牵引算法的同时也在执行能量管理策略、储能系统充放电策略等。DC/DC采用基于目标斜坡函数电流/电压双环控制算法。
控制系统采用储能系统电流作为内环、目标电流或电压作为外环的双闭环系统;其中,电流内环可有效提高控制系统的稳定性,抑制电池充放电的波动,提高电池的使用安全性,电流i
电压控制环有两个目标值u
如图6所示,图6是根据本申请实施例的电流斜坡控制函数显示图;电网区进入无网区、KMM未打开时,电网和储能系统给负载并行供电,DC/DC控制器控制u
进无网信号一般提前30m发出,该斜坡函数需要满足最高车速下、进入无网前完成,有轨电车最高车速一般不超过80km/s,实际电网电流最大800A,考虑到系统指令传输延时和DC/DC状态转换延时,斜坡函数斜率可设定为1000A/s,预留0.5s的系统反应时间,控制节拍步长为1000/n,n为节拍数。需要注意,再生制动时,网流为i
无网区进入电网区、过零压控制后KMM闭合,u
实施例三
请参照图7至图10,图7是根据本申请实施例的有网区进入无网区牵引状态时状态开关转换逻辑图;图8是根据本申请实施例的有网区进入无网区制动状态时状态开关转换逻辑图;图9是根据本申请实施例的无网区进入有网区牵引状态时状态开关转换逻辑图;图10是根据本申请实施例的无网区进入有网区制动状态时状态开关转换逻辑图。如图3至图10所示,状态转换开关逻辑为如下:
其中,S1、S2、S3是控制流程的状态转换开关。S1是DC/DC工作模式开关,选择器值1代表BOOST升压供电状态,选择器值2代表BUCK降压充电状态,0代表停机状态;S2是外环控制模式开关,选择器值1代表采用电压环,选择器值2代表采用电流环;S3是电压外环中目标电压选择开关,选择器值1代表采用受电弓电压u
如图7所示,有网区进入无网区、牵引时状态转换开关逻辑为如下:
t0时刻,车辆处于有网区,S1开关处于BUCK或BOOST状态、S2开关处于电流模式或电压模式、S3开关处于Uref2电压参考模式,KMM接触器闭合,电网电压up正常,蓄电池电流ib正常,in网流正常;
t1时刻,车辆收到有网区进入无网区信号,系统开始转换;
t1~t2时刻,供电模式开始进行转换。S1开关处于非BUCK和BOOST状态即逐步关闭准备切换、S2开关处于非电流模式和电压模式即逐步关闭准备切换、S3开关处于非Uref1和Uref2电压参考模式即逐步关闭准备切换,KMM接触器闭合,电网电压up正常,蓄电池电流ib逐步减小为0,in网流正常;
t2~t3时刻,各开关延时等待,确保系统安全切换;
t3~t4时刻,各状态开关开始转换,S1开关处于BOOST状态、S2开关处于电流模式、S3开关处于Uref2电压参考模式,KMM接触器闭合,电网电压up正常,蓄电池电流ib按电流斜坡控制函数控制正向增加以逐步接管电网电流,电网电流in逐步减少;
t4~t5时刻,各状态开关维持,S1开关处于BOOST状态、S2开关处于电流模式、S3开关处于Uref2电压参考模式,KMM接触器闭合,电网电压up正常,蓄电池电流ib接管电网电流,电网电流in正向稳定过零点;
t5~t6时刻,各状态开关开始转换,S1开关处于BOOST状态、S2开关转换为电压模式、S3开关处于Uref2电压参考模式,KMM接触器打开,电网电压up正常,蓄电池电流ib处于蓄电池牵引供电状态,电网电流in为零,完成由有网区到无网区转换;
t7时刻,电网供电中断,列车正式进入无电区;
其中,需要注意,如果电池能力不足转换时牵引系统需要降功运行。
如图8所示,有网区进入无网区、制动时开关逻辑为如下:
t0时刻,车辆处于有网区,S1开关处于BUCK或BOOST状态、S2开关处于电流模式或电压模式、S3开关处于Uref2电压参考模式,KMM接触器闭合,电网电压up正常,蓄电池电流ib正常,in网流正常;
t1时刻,车辆收到有网区进入无网区信号,系统开始转换;
t1~t2时刻,供电模式开始进行转换。S1开关处于非BUCK和BOOST状态即逐步关闭准备切换、S2开关处于非电流模式和电压模式即逐步关闭准备切换、S3开关处于非Uref1和Uref2电压参考模式即逐步关闭准备切换,KMM接触器闭合,电网电压up正常,蓄电池电流ib逐步减小为0,in网流正常;
t2~t3时刻,各开关延时等待,确保系统安全切换;
t3~t4时刻,各状态开关开始转换,S1开关处于BUCK状态、S2开关处于电流模式、S3开关处于Uref2电压参考模式,KMM接触器闭合,电网电压up正常,蓄电池电流ib按电流斜坡控制函数控制负向增加以逐步接管电网电流,电网负向电流in逐步减少;
t4~t5时刻,各状态开关维持,S1开关处于BUCK状态、S2开关处于电流模式、S3开关处于Uref2电压参考模式,KMM接触器闭合,电网电压up正常,蓄电池电流ib接管电网电流,电网电流in负向稳定过零点;
t5~t6时刻,各状态开关开始转换,S1开关处于BOOST状态、S2开关转换为电压模式、S3开关处于Uref2电压参考模式,KMM接触器打开,电网电压up正常,蓄电池电流ib处于蓄电池制动充电状态,电网电流in为零,完成由有网区到无网区转换;
t7时刻,电网供电中断,列车正式进入无电区;
其中,需要注意,如果电池能力不足转换时牵引系统需要降功运行。
如图9所示,有网区进入无网区、制动时状态开关转换逻辑如下:
t0时刻,车辆处于有网区,S1开关处于BUCK或BOOST状态、S2开关处于电流模式或电压模式、S3开关处于Uref2电压参考模式,KMM接触器闭合,电网电压up正常,蓄电池电流ib正常,in网流正常;
t1时刻,车辆收到有网区进入无网区信号,系统开始转换;
t1~t2时刻,供电模式开始进行转换。S1开关处于非BUCK和BOOST状态即逐步关闭准备切换、S2开关处于非电流模式和电压模式即逐步关闭准备切换、S3开关处于非Uref1和Uref2电压参考模式即逐步关闭准备切换,KMM接触器闭合,电网电压up正常,蓄电池电流ib逐步减小为0,in网流正常;
t2~t3时刻,各开关延时等待,确保系统安全切换;
t3~t4时刻,各状态开关开始转换,S1开关处于BUCK状态、S2开关处于电流模式、S3开关处于Uref2电压参考模式,KMM接触器闭合,电网电压up正常,蓄电池电流ib按电流斜坡控制函数控制负向增加以逐步接管电网电流,电网负向电流in逐步减少;
t4~t5时刻,各状态开关维持,S1开关处于BUCK状态、S2开关处于电流模式、S3开关处于Uref2电压参考模式,KMM接触器闭合,电网电压up正常,蓄电池电流ib接管电网电流,电网电流in负向稳定过零点;
t5~t6时刻,各状态开关开始转换,S1开关处于BOOST状态、S2开关转换为电压模式、S3开关处于Uref2电压参考模式,KMM接触器打开,电网电压up正常,蓄电池电流ib处于蓄电池制动充电状态,电网电流in为零,完成由有网区到无网区转换;
t7时刻,电网供电中断,列车正式进入无电区;
其中,需要注意,如果电池能力不足转换时牵引系统需要降功运行。
如图10所示,无网区进入有网区、制动时状态开关转换逻辑为如下:
t0~t1时刻,车辆处于无网区,S1开关处于BUCK状态、S2开关处于电压模式、S3开关处于Uref2电压参考模式,KMM接触器打开,电网电压up由0恢复正常,蓄电池电流ib正常,in网流为0;
t1时刻,车辆收到无网区进入有网区信号,系统开始转换;
t1~t2时刻,供电模式开始进行转换。S1开关处于BUCK状态、S2开关处于电压模式、S3开关处于Uref2电压参考模式准备切换,KMM接触器打开,电网电压up正常,蓄电池电流ib正常,in网流为0;
t2~t3时刻,各模式开关开始转换。S1开关处于BUCK状态、S2开关处于电压模式、S3切换为Uref1电压参考模式,KMM接触器打开,电网电压up正常,蓄电池电流ib会随反向电压控制模式有所波动,in网流为0,un逐步完成跟随up,ufc逐步完成跟随up;
t3~t4时刻,各状态开关维持。S1开关处于BUCK状态、S2开关处于电压模式、S3处于Uref1电压参考模式,KMM接触器打开,电网电压up正常,蓄电池电流ib会随反向电压跟随控制模式有所波动,in网流为0,un稳定跟随up,ufc稳定跟随up;
t4~t5时刻,各状态开关转换。S1开关处于BUCK状态、S2开关转换为电流模式、S3处于Uref1电压参考模式,KMM接触器闭合,电网电压up正常,蓄电池电流ib按电流斜坡控制函数控制负向减少以逐步被电网电流接管,in网流被动逐步负向增加以接管电池供电,un被钳位到up,ufc被钳位到up;
t5~t6时刻,各状态维持。S1开关处于BOOST状态、S2开关转换为电流模式、S3处于Uref1电压参考模式,KMM接触器闭合,电网电压up正常,蓄电池电流ib稳定过零点,in网流正常,un被钳位到up,ufc被钳位到up;
t6~t7时刻,电网供电恢复,列车正式进入有网区。
综上所述,发明提出的一种牵引系统电路及其供电模式切换方法为同类车型供电模式无缝切换,不限于储能系统的形式如超级电容、锂电池、氢燃料等,提供了一种有效的解决方法,将会带来不错的经济和社会效益。本发明深入分析一体式控制策略,提出新能源列车牵引系统、储能系统、车辆系统集成式拓扑结构,整合能源、动力相关的子系统,为解决车辆耦合供电系统和动力系统间的合作关系提供了一体化策略实施平台,对车辆减少设备种类、腾出设备空间也有推动作用;本发明精细化控制车辆电源模式切换,在牵引、制动、惰行、有网转无网和无网转有网各种场景下实现了自由转换,车辆运行平稳无冲击,极大提高混合供电系统在轨道交通车辆的应用范围;精准化提出了基于目标模式的电流/电压双环控制算法,解决双向DC/DC驱动对象复杂、目标模式多变的难点,实现了一体化系统的内部稳定运行和外部车辆供电模式的平滑切换;本发明提高了系统稳定性,改善了切换时电流冲击难题,提出了采用斜坡函数越过目标电流“零点”的控制方法,具有不错的实用性。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求的保护范围为准。
- 一种直流牵引供电系统电流增量保护测试方法和系统
- 一种编码模式切换方法和装置、解码模式切换方法和装置
- 网口POE供电电路、供电电路、监控系统及供电方法
- 一种工程机械用多模式输出供电电路,供电控制系统及其控制方法
- 一种工程机械用多模式输出供电电路,供电控制系统及其控制方法