具有压电收发器的成像设备
文献发布时间:2023-06-19 09:52:39
技术领域
本发明涉及成像设备,更具体地,涉及具有微机械超声换能器(MUT)的成像设备。
背景技术
用于对人体的内部器官进行成像并显示内部器官的图像的一种非侵入式成像系统将信号发送至人体并接收从器官反射的信号。通常,在成像系统中使用的换能器(例如,电容换能(cMUT)或压电换能(pMUT))被称为收发器,并且某些收发器基于光声或超声效应。
通常,MUT包括两个或更多个电极,并且电极的拓扑影响MUT的电性能和声学性能。例如,由pMUT产生的声压的幅度随着电极尺寸的增加而增加,从而改善了pMUT的声学性能。但是,随着电极尺寸的增加,电容也会增加,从而降低pMUT的电性能。在另一个示例中,在pMUT的振动谐振频率处的声压幅度受电极形状的影响。因此,需要用于设计电极以增强换能器的声学和电性能的方法。
发明内容
在各实施方式中,微机械超声换能器(MUT)包括非对称的顶部电极。非对称电极沿着轴线的面密度分布具有多个局部最大值,其中所述多个局部最大值的位置与振动谐振频率处的多个反节点(anti-nodal point)位于的位置重合。
在各实施方式中,微机械超声换能器(MUT)包括对称的顶部电极。对称电极沿轴线的面密度分布具有多个局部最大值,其中,所述多个局部最大值的位置与振动谐振频率处的多个反节点位于的位置重合。
在各实施方式中,换能器阵列包括多个微机械超声换能器(MUT)。多个MUT中的每个MUT包括非对称的顶部电极。
在各实施方式中,成像设备包括具有多个微机械超声换能器(MUT)的换能器阵列。多个MUT中的每个MUT包括对称的顶部电极。对称电极沿轴线的面密度分布具有多个局部最大值,并且其中多个局部最大值的位置与振动谐振频率处的多个反节点位于的位置重合。
附图说明
将参考本发明的实施方式,其示例可以在附图中示出。这些图仅是说明性的,而非限制性的。尽管一般在这些实施方式的上下文中描述了本发明,但是应当理解,其并不旨在将本发明的范围限制为这些特定实施方式。
附图(或“图”)1示出了根据本公开的实施方式的成像系统。
图2示出了根据本公开的实施方式的成像器的示意图。
图3A示出了根据本公开实施方式的收发器阵列的侧视图。
图3B示出了根据本公开的实施方式的收发器块的俯视图。
图4A示出了根据本公开的实施方式的MUT的俯视图。
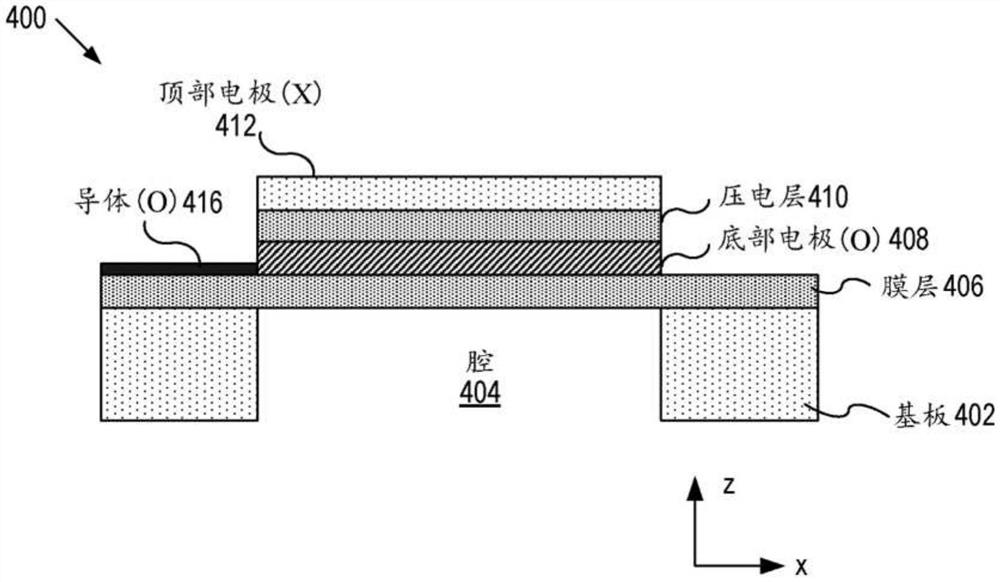
图4B示出了根据本公开的实施方式的沿图4A中的方向4-4截取的MUT的截面图。
图5A至图5E示出了根据本公开的实施方式的MUT的振动模式形状。
图6A示出了根据本公开的实施方式的MUT的声学响应作为频率函数的曲线图。
图6B示出了根据本公开的实施方式的MUT的俯视图。
图6C示出了根据本公开的实施方式的顶部电极的面密度分布。
图7A示出了根据本公开的实施方式的MUT的声学响应作为频率函数的曲线图。
图7B示出了根据本公开的实施方式的MUT的俯视图。
图7C示出了根据本公开的实施方式的顶部电极的面密度分布。
图8A示出了根据本公开的实施方式的MUT的声学响应作为频率函数的曲线图。
图8B示出了根据本公开的实施方式的MUT的俯视图。
图8C示出了根据本公开的实施方式的顶部电极的面密度分布。
图9A示出了根据本公开的实施方式的MUT的声学响应作为频率函数的曲线图。
图9B示出了根据本公开的实施方式的MUT的俯视图。
图9C示出了根据本公开的实施方式的顶部电极的面密度分布。
图10A示出了根据本公开的实施方式的MUT的声学响应作为频率函数的曲线图。
图10B示出了根据本公开的实施方式的MUT的俯视图。
图10C示出了根据本公开的实施方式的顶部电极的面密度分布。
具体实施方式
在下面的描述中,出于解释的目的,阐述了具体细节以便提供对本公开的理解。然而,本领域的技术人员容易理解可以在没有这些细节的情况下实践本公开。此外,本领域技术人员将认识到,以下描述的本公开的实施方式可以以多种方式来实现,诸如过程、装置、系统或设备。
图中所示的元件/组件是本公开的示例性实施方式的说明,并且意在避免使本公开模糊。说明书中对“一个实施方式”、“优选实施方式”、“一个实施方式”或“实施方式”的引用是指结合该实施方式描述的特定特征、结构、特性或功能包括在本发明的至少一个实施方式中并且可以在一个以上的实施方式中。说明书中各个地方出现的短语“在一个实施方式中”、“在各实施方式中”或“在各实施方式中”不一定都指的是同一实施方式。术语“包括”、“包括”、“包含”和“包含”应被理解为开放术语,并且以下的任何列表都是示例,并不意味着限于所列出的项目。本文使用的任何标题仅用于组织目的,并且不应用于限制说明书或权利要求书的范围。此外,在说明书中的各个地方使用某些术语是为了说明,而不应解释为限制性的。
图1示出了根据本公开的实施方式的成像系统100的示意图。如图所示,系统100可以包括:成像器120,其在发射模式/过程中产生压力波122并将其向诸如心脏的内部器官112发射,并接收从内部器官反射的压力波;以及通过通信通道130向成像器发送和接收信号的设备102。在各实施方式中,内部器官112可以将一部分压力波122朝向成像器120反射,并且成像器120可以捕获反射的压力波并且在接收模式/过程中产生电信号。成像器120可以将电信号传送到设备102,并且设备102可以使用电信号在显示器/屏幕104上显示器官或目标的图像。
在各实施方式中,成像器120也可以用于获取动物的内部器官的图像。像多普勒模式成像中一样,成像器120还可以用于确定动脉和静脉中的血流的方向和速度,并且还可以测量组织刚度。在各实施方式中,压力波122可以是声波,其可以传播通过人/动物体并被内部器官、组织或动脉和静脉反射。
在各实施方式中,成像器120可以是便携式设备,并且通过通信信道130以无线方式(使用诸如802.11协议的协议)或经由电缆(诸如USB 2、USB 3、USB 3.1、USB-C和USB雷电)与设备102传送信号。在各实施方式中,设备102可以是移动设备(例如,手机或iPad),或可以向用户显示图像的固定计算设备。
在各实施方式中,可以使用一个以上的成像器来产生目标器官的图像。例如,第一成像器可以向目标器官发送压力波,而第二成像器可以接收从目标器官反射的压力波,并响应于所接收的波而产生电荷。
图2示出了根据本公开的实施方式的成像器120的示意图。在各实施方式中,成像器120可以是超声成像器。如图2所示,成像器120可以包括:用于发送和接收压力波的收发器块210;涂层212,其用作透镜,用于设置压力波的传播方向和/或聚焦压力波,并且还用作收发器块与人体110之间的声阻抗界面;控制单元202,例如ASIC芯片(或简称为ASIC),用于控制收发器块210并通过凸块耦合至换能器块210;现场可编程门阵列(FPGA)214,用于控制成像器120的组件;电路215,例如模拟前端(AFE),用于处理/调节信号;吸声层203,用于吸收由换能器块210产生并向电路215传播的波;通信单元208,用于通过一个或多个端口216与诸如设备102的外部设备传送数据;用于存储数据的存储器218;电池206,用于向成像器的组件提供电力;可选地,用于显示目标器官的图像的显示器217。
在各实施方式中,设备102可以具有显示器/屏幕。在这种情况下,显示器可以不包括在成像器120中。在各实施方式中,成像器120可以通过端口216之一从设备102接收电力。在这种情况下,成像器120可以不包括电池206。要注意的是,成像器120的一个或多个组件可以组合成一个整体的电子元件。同样,成像器120的每个组件可以在一个或多个电子元件中实现。
在各实施方式中,使用者可以在身体110直接与涂层212接触之前,将凝胶涂在人体110的皮肤上,使得在涂层212与人体110之间的界面处的阻抗匹配可以改进,即可以减小在界面处的压力波122的损失,并且还减小在界面处朝向成像器120传播的反射波的损失。在各实施方式中,收发器块210可以被安装在基板上并且可以被附接到吸声层。该层吸收沿反方向发射的任何超声信号,否则这些超声信号可能会被反射并干扰图像质量。
如下所述,涂层212仅仅是平坦的匹配层,只是为了使声信号从换能器到身体的传输最大化,反之亦然。在这种情况下,不需要光束聚焦,因为可以在控制单元202中以电子方式实现光束聚焦。成像器120可以使用反射信号来创建器官112的图像,并且可以以多种格式在屏幕上显示结果,例如带有或不带有器官112的图像显示的图形、曲线图和统计数据。
在各实施方式中,诸如ASIC的控制单元202可以与收发器块一起组装为一个单元。在其他实施方式中,控制单元202可以位于成像器120的外部并且经由电缆电耦合至收发器块210。在各实施方式中,成像器120可以包括包围组件202-215的壳体和用于耗散由组件产生的热能的散热机构。
图3A示出了根据本公开的实施方式的收发器阵列200的侧视图。图3B示出了根据本公开的实施方式的收发器块210的俯视图。在各实施方式中,阵列200可以包括一个或多个收发器块210。如图所示,收发器阵列200可以包括以预定方式布置的一个或多个收发器块210。例如,如图3A所示,收发器块(或简称为块)210可以被物理地弯曲以进一步形成弯曲的收发器阵列并且被布置在成像器120中。对于本领域的普通技术人员应当容易理解的是,成像器120可以包括任何合适数量的块,并且块可以以任何合适的方式布置,并且每个块210可以包括设置在收发器基板304上的任何合适数量的压电元件302。在基板304上,可以放置一个或多个温度传感器320以便在操作过程中监视收发器块210的温度。在各实施方式中,收发器阵列200可以是由基板制造的微机械阵列。
图4A示出了根据本公开的实施方式的MUT 400的俯视图。图4B示出了根据本公开的实施方式的沿线4-4截取的图4A中的MUT400的截面图。如图所示,MUT可以包括:悬置在基板402上的膜层406;设置在膜层(或简称为膜)406上的底部电极(O)408;设置在底部电极(O)408上的压电层410;设置在压电层410上的顶部电极(X)412。
在各实施方式中,基板402和膜406可以是一个整体,并且可以形成腔404以限定膜406。在各实施方式中,可以在腔404中填充预定压力的气体或声阻尼材料以控制膜406的振动。在各实施方式中,顶部电极412的投影区域的几何形状可以被配置为控制pMUT 400的动态性能和电容大小。
在各实施方式中,每个MUT 400可以是pMUT并且包括由PZT、KNN、PZT-N、PMN-Pt、AlN、Sc-AlN、ZnO、PVDF和LiNiO
图5A至图5E示出了根据本公开的实施方式的五个振动模式500、510、520、530和540。在图5A至图5E中,为了说明的目的,每个MUT 502、512、522、532和542由单条线表示,其中,每条单线示出了MUT中的层堆叠的曲率。在操作期间,具有膜406、底部电极408、压电层410和顶部电极412的层的堆叠可以作为单个主体在垂直方向上移动,并且可以变形以在x-z平面上具有单条线的曲率。而且,对应于不同振动模式的线502、512、522、532和542示出了在不同振动模式下的堆叠的曲率。
在各实施方式中,五个振动模式500、510、520、530和540可以分别与五个振动谐振频率f1、f2、f3、f4和f5相关联。在图5A至图5E中,仅示出了五个振动模式。然而,对于本领域的普通技术人员应该容易理解的是,MUT可以以多于五个的振动谐振模式(或简称为振动模式)操作。
在图5A中,MUT 502可以在第一振动模式500下操作,其中箭头504指示MUT 502(更具体地,层的堆叠)在第一模式500下在垂直方向上移动。在各实施方式中,第一振动模式500可以是对称的,即,模式形状相对于MUT的中心线506是对称的。在各实施方式中,MUT502的顶部电极的形状可以是对称的并且类似于顶部电极412的形状。
在图5C中,MUT 522可以在第三振动模式520下操作。在各实施方式中,第三振动模式520可以是对称的,即,模式形状相对于中心线506是对称的。在下文中,术语对称振动模式是指振动模式,其中反节点(例如,525、526和527)的位置(即,峰值幅度)相对于中心线506对称布置,并且中心线506表示与z轴线平行并在x轴线上通过MUT的中点的线。同样,术语非对称振动模式是指振动模式,其中反节点的位置(例如,图5B中的516和517)相对于中心线506非对称地布置。
在第三振动模式520中,MUT 522可具有两个节点和三个反节点(或等效地,三个峰值幅度点)525、526和527。在各实施方式中,MUT 522的顶部电极的形状可以是对称的并且类似于顶部电极412的形状。
在图5E中,MUT 542可以在第五振动模式540下操作。在各实施方式中,第五振动模式540可以是对称的,即,模式形状相对于中心线506对称。在第五振动模式下,MUT 542可以具有四个节点和五个反节点(即,五个峰值幅度点)544、545、546、547和548。在各实施方式中,MUT 542的顶部电极的形状可以是对称的并且类似于顶部电极412的形状。
在各实施方式中,如果顶部电极具有对称形状,则MUT可以以对称振动模式500、520和540操作。在各实施方式中,可以改变顶部电极的几何形状,以使MUT可以在一个或多个非对称振动模式以及对称振动模式下振动。在图5B中,MUT 512可以在非对称的第二振动模式510下操作。在非对称的第二振动模式下,MUT 512可以具有一个节点和两个反节点(或等效地,两个峰值幅度点)516和517。结合图7A至图7C描述与MUT 512相对应的顶部电极的形状。
在图5D中,MUT 532可以在非对称的第三振动模式530下操作。如图所示,振动模式530可以相对于中心线506是非对称的。在非对称的第三振动模式下,MUT 532可以具有两个节点和三个反节点(或等效地,三个峰值幅度点)534、535和537。在各实施方式中,非对称第三振动模式530的峰值幅度539可高于对称第三振动模式520的峰值幅度529。通常,非对称振动模式(例如,530)可能比相同阶数的对称振动模式(例如,520)具有更高的峰值幅度。
通常,声压性能是指每个MUT在某个频率下产生的声压波的能量,该声压性能可以随着每个MUT的峰值幅度在该频率下增加而增加。如图5C和图5D所示,非对称振动模式可以比相同阶数的对称振动模式具有更高的峰值幅度。这样,以非对称振动模式操作的MUT比以相同阶数的对称振动模式操作的MUT可产生更高的声压性能。而且,对称振动模式的频率可以与相同阶数的非对称振动模式的频率不同。这样,在各实施方式中,每个MUT的振动谐振频率可以通过从相同阶数的对称模式切换到非对称模式来进行调谐(反之亦然)。
图6A示出了根据本公开的实施方式的具有顶部电极622的MUT620的声学响应的曲线图600。图6B示出了根据本公开的实施方式的MUT 620的俯视图。在图6B中,高度H 641表示顶部电极的垂直尺寸,并且图6C示出了根据本公开的实施方式的沿X轴线642的高度H641的分布660(即,面密度分布)。出于说明的目的,在曲线图660上示出图5A中的振动模式500。如图所示,顶部电极622的投影区域具有椭圆形,其中该椭圆形相对于中心线630和x轴线642对称,即,顶部电极的形状是对称的。这样,MUT 620在对称振动模式f1、f3和f5下可以具有强的声学响应。而且,如圆圈612和614所示,MUT 620在非对称振动模式510(f2)和530(f4)处可能具有非常弱的声学响应。
在各实施方式中,高度H 641最大的位置625与振动模式500的反节点(即峰值幅度)发生的位置503相同。结果,如圆圈602所示,MUT 620可以在频率f1处具有最强的声学响应,其中f1对应于第一对称振动模式(500)。
图7A示出了根据本公开的实施方式的具有顶部电极722的MUT720的声学响应的曲线图700。图7B示出了根据本公开的实施方式的MUT 720的俯视图。在图7B中,高度H 741表示顶部电极的垂直尺寸。图7C示出了根据本公开的实施方式的沿x轴线742的高度H 741的分布760(或等效地,面密度分布)。为了说明的目的,在面积分布曲线图760上示出了图5B中的振动模式510。如上所述,术语高度和面积密度可互换使用,因为高度分布760可表示顶部电极722的面积密度沿x轴线742的分布。
如图7B所示,顶部电极722的形状可以是非对称的,因为顶部电极722相对于在x轴线上穿过顶部电极的中点的中心线730非对称。结果,MUT 720可以在对称振动模式(f1、f3和f5)和非对称振动模式(f2和f4)下操作。在各实施方式中,面密度分布760的局部最大值H1 735和H2 737的位置726和728分别与振动模式510的反节点516和517重合。结果,如圆圈702所示,MUT 720可以在频率f2处具有最强的声学响应。
在各实施方式中,可以调节L2 733与L1 731的比率,以控制面密度分布的局部最大值的位置726和728。例如,L2 733与L1 731的比率可以大于1.05。在各实施方式中,可以调节H1 735与H2 737的比率以控制频率f2处的声学响应。例如,高度H1 735与H2 737的比率可以大于1.05。
在各实施方式中,顶部电极722的面密度760的分布可以影响MUT 720的声学响应。如结合图9A至图9C所述,可以修改顶部电极722的面密度分布,使得声学响应在频率f4处具有最大值。
图8A示出了根据本公开的实施方式的具有顶部电极822的MUT820的声学响应的曲线图800。图8B示出了根据本公开的实施方式的MUT 820的俯视图。图8C示出了沿x轴线843的顶部电极822的高度H 841的分布860(或等效地,面密度分布)。出于说明的目的,也在曲线图860上示出图5C中的对称振动模式520。如所描绘的,因为顶部电极822关于x轴线843和中心线830都是对称的,所以顶部电极822可以是对称的,并且因此,MUT 820可以在对称振动模式(f1、f3和f5)处具有强的声学响应,以及在非对称振动模式(f2和f4)处具有非常弱的声学响应,如圆圈804和806所示。
如所描绘的,面密度分布860可以在三个位置824、825和826处具有局部最大值。而且,这三个位置824、825和826分别与第三对称振动模式520的反节点位于的位置525、526和527重合。结果,如圆圈802所示,MUT 820可以在频率f3处具有最强的声学响应。
在各实施方式中,可以调节L3 844与L4 846的比率,以控制面密度分布的局部最大值的位置824。例如,L4 846与L3 844的比率可以等于或大于10。在各实施方式中,H3 850与H4 852的比率可以被调节以控制频率f2处的声学响应。例如,H4 852与H3 850的比率可以等于或大于1.05。
图9A示出了根据本公开的实施方式的具有顶部电极922的MUT920的声学响应的曲线图900。图9B示出了根据本公开的实施方式的MUT 920的俯视图。图9C示出了高度H 941沿着x轴线943的分布960。出于说明的目的,在高度(或面密度)分布图960上还示出了图5D中的非对称振动模式530。如图所示,顶部电极922可能相对于中心线930非对称,因此,MUT920可能具有对称振动模式(f1、f3和f5)以及非对称振动模式(f2和f4)。同样,在各实施方式中,如圆圈902所示,声学响应在非对称振动频率f4处最强(530)。
在各实施方式中,面密度分布960可以在三个位置924、925和926处具有局部极大值。而且,这三个位置924、925和926可以与振动模式530的反节点位于的位置534、535和537重合。结果,如圆圈902所示,MUT 920可以在频率f4处具有最强的声学响应。
图10A示出了根据本公开的实施方式的具有顶部电极1022的MUT 1020的声学响应的曲线图1000。图10B示出了根据本公开的实施方式的MUT 1020的俯视图。图10C示出了高度H 1041沿x轴线1043的分布1060。出于说明的目的,在曲线图1060上还示出了图5E中的对称振动模式540。如所描绘的,因为顶部电极1022相对于x轴线1043和中心线1030都是对称的,所以顶部电极1022可以是对称的,因此,MUT 1020可以在对称振动模式(f1、f3和f5)处具有强的声学响应,并且在非对称振动模式(f2和f4)处具有非常弱的声学响应。而且,如圆圈1002所示,在第五对称振动模式f5处,声学响应最强。
在各实施方式中,面密度分布1060可在五个位置1024、1025、1026、1027和1028处具有局部最大值。而且,这五个位置1024、1025、1026、1027和1028可与振动模式540的峰值幅度位于的位置544、545、546、547和548重合。结果,MUT 1020可以在频率f5处具有最强的声学响应。
在各实施方式中,如结合图6A至图10C所述,对称的顶部电极在对称的振动模式处可能具有强的声学响应,而在非对称振动模式处可能会具有非常不利的声学响应。而且,在各实施方式中,非对称顶部电极在对称和非对称振动模式处都可以具有强的声学响应。在各实施方式中,为了增加在振动模式处的声学响应,可以调节顶部电极的面密度分布,使得面密度分布的局部最大值(或最大值)位于振动模式的反节点位于的位置。
为了说明的目的,在图6A至图10C中仅示出了五个振动模式f1-f5。但是,对于本领域普通技术人员来说应该容易理解的是,MUT可以具有多于五个的振动模式。同样,对于本领域普通技术人员应该容易理解的是,可以以与图6A至图10C中所描述的相似的方式,调节面密度分布以控制较高振动模式处的声学响应的大小。
注意,图3B中的每个MUT 302可以是压电微机械超声换能器(pMUT)。然而,对于本领域的普通技术人员应该容易理解的是,收发器块210可以包括电容微机械超声换能器(cMUT)的阵列,即,压电元件302可以由cMUT代替。在这种情况下,CMUT的顶部电极可以具有与顶部电极622、722、822、922和1022的形状之一相似的形状,从而基于结合图6A至图10C描述的原理在各种振动谐振频率处控制cMUT的声学响应。
尽管本发明易于进行各种修改和替代形式,但是其具体示例已经在附图中示出并且在本文中进行了详细描述。然而,应当理解,本发明不限于所公开的特定形式,相反,本发明将覆盖落入所附权利要求的范围内的所有修改、等同物形式和替代物。