一种楼承钢板加工用钝化装置及工作方法
文献发布时间:2023-06-19 11:13:06
技术领域
本发明涉及零件加工领域,具体涉及一种楼承钢板加工用钝化装置及工作方法。
背景技术
钢板是常用的机械零件构件,在使用中会根据需要使用不同型号和长度的钢板,通过对钢板的组装和连接构成需要的零件和机构,在金属零件的加工过程中经常需要采用钝化加工的方式在金属的表面进行处理,提高金属零件的抗氧化腐蚀能力,更好的延长零件的使用寿命。
现有的钢板钝化过程中一般需要对钢板除油脱脂、清洗、酸洗钝化、钝化后清理等多步操作,在使用中需要对工件在多个反应池之间进行转运,操作麻烦,同时成套设备需要占用较大的空间,同时现有钢板钝化装置只能对一定长度的钢板进行钝化,当需要使用其他长度时调节不便,甚至需要更换吊装工装,使用操作不便,同时加工效率比较低;因此,不满足现有的需求。
我国专利申请号CN202010480540.X;公开日:2020.08.25.公开了一种可对多种规格钢板加工的多工位钝化装置,涉及零件加工技术领域,解决了现有的钢板钝化装置操作麻烦,同时成套设备需要占用较大的空间,同时现有钢板钝化装置只能对一定长度的钢板进行钝化,当需要使用其他长度时调节不便,同时加工效率比较低,包括支架;所述支架的下部外侧设置有四组工作箱;所述支架的上端面固定连接有一组转动驱动装置;所述摆动升降件的后方转动连接有一组承载调节件;所述摆动升降件的左右两侧均转动连接有一组承载调节驱动件。该装置工作箱放置紧密,工序更为集中,可以对不同长度型号的钢板的支撑承载,成套设备的体积较小,可以实现对钢板的连续作业,提高了工作效率。
我国专利申请号:CN201410826112.2;公开日:2017.0912公开了太阳能电池模块包括:衬底;吸收层,形成在衬底上方;多孔氧化铝钝化层,形成在吸收层的上表面上;缓冲层,共形地形成在钝化层上方;以及透明导电氧化物层,共形地形成在缓冲层上方。本发明还提供了钝化方法。
以上两个发明的结构存在以下不足:
1.在承载组件对钢板进行夹持时,其可通过支撑件和分隔部度钢板进行夹持,由于支撑件和分隔部的结构限制,仅可对形状较为规则的钢板进行夹持,例如表面和形状较平整的普通钢板,而无法对形状不规则的钢板进行夹持,因而降低了装置的实用性。
2.钝化工艺包括多个工序,工作箱内虽可盛放若干个可供钝化进行的液体,但是在多工位承载装置带动不同承载组件上的钢板旋转时,容易将不同工序打乱,即钝化工序无法按部就班进行,例如还没有除油的钢板先进行了清洗,严重影响钝化效果和成品质量。
根据现有技术的不足,因而有必要设计一种可夹持不同类型的钢板,同时能保证多个工序精准无误,依次进行的楼承钢板加工用钝化装置及工作方法。
发明内容
本发明的目的在于提供一种楼承钢板加工用钝化装置及工作方法。
为达此目的,本发明采用以下技术方案:
提供一种楼承钢板加工用钝化装置,包括底座和加工箱,所述加工箱设在底座顶部,还包括控制器、滑动机构、升降机构和夹持机构,所述滑动机构设在底座的顶部一带动楼承钢板滑动,滑动机构包括驱动组件和两个滑动组件,所述升降机构设在滑动机构的顶部以带动楼承钢板升降,升降机构包括两个U型架、两个升降套筒和两个传动组件,每个U型架均固定设在一个滑动组件上,每个传动组件均设在一个U型架的内部,每个升降套筒均滑动设置在一个U型架的顶部,所述夹持机构固定设在两个升降套筒之间以用来夹持楼承钢板,夹持机构包括牵引组件、两个滑板和两个限位组件,每个升降套筒的顶部均固定设有伸缩管,加工箱的两端呈对称设置有四个支撑杆,每两个支撑杆之间均固定设有滑轨,每个滑板均滑动设置在两个滑轨之间,所述牵引组件设在其中一个滑轨的顶部,每个限位组件均设在一个滑板的外壁上,所述驱动组件、传动组件和牵引组件与控制器均为电性连接。
进一步的,所述牵引组件包括伺服单机、圆盘和两个连杆,其中一个滑轨的顶部固定设有L型板,所述伺服电机固定设在L型板上,所述圆盘套设在伺服电机的输出端上,每个连杆均铰接设置在圆盘的顶部,并且每个连杆远离圆盘的一端均与一个滑板的顶部铰接,所述伺服电机与控制器电连接。
进一步的,所述限位组件包括下搭接板、上抵紧板和两个弹性杆,两个弹性杆呈对称设置在滑板的顶部和底部内壁上,所述下搭接板和上抵紧板分别固定设在两个弹性杆远离升降套筒的一端,每个弹性杆的两侧均插设有两个第一导向杆,两个第一导向杆远离升降套筒的一端分别与下搭接板和上抵紧板的外壁固定连接。
进一步的,所述下搭接板和上抵紧板之间呈对称设置有若干个限位卡块,每个限位卡块上均设有插槽。
进一步的,所述滑动组件包括丝杆、滑块和两个第二导向杆,底座的顶部呈对称设置有两个安装板,所述丝杆可转动的设置在两个安装板之间,两个第二导向杆呈对称设置在两个安装板之间,所述滑块螺纹连接在丝杆上,并且每个第二导向杆均与滑块插接。
进一步的,所述驱动组件包括第一链轮、步进电机和两个第二链轮,所述步进电机固定设在底座的顶部,所述第一链轮套设在步进电机的输出端上,每个所述第二链轮均套设在丝杆靠近步进电机的一端,第一链轮和两个第二链轮之间套设有链条,所述步进电机与控制器电连接。
进一步的,其中一个滑板的底部外壁上固定设有位置传感器,加工箱的内部等间距设置有若干个反应池,每个反应池的顶端外壁上均固定设有感应柱,所述位置传感器与控制器电连接。
进一步的,所述传动组件包括驱动电机、第一齿轮、第二齿轮和螺杆,所述驱动电机固定设在U型架的内侧底部,所述第一齿轮套设在驱动电机的输出端上,所述螺杆可转动的设置在U型架的内部,所述第二齿轮套设在螺杆的底部外壁上,第一齿轮和第二齿轮啮合连接,并且第一齿轮比第二齿轮小,并且升降套筒的底部固定连接有限位板,螺杆穿过限位板与升降套筒的内壁螺纹连接,所述驱动电机与控制器电连接。
进一步的,所述U型架的内部还固定设有限位杆,所述缓冲弹簧套设在限位杆的外壁上,限位板的顶部和U型架的内侧底部分别与缓冲弹簧的两端抵触。
一种楼承钢板加工用钝化装置的工作方法,包括以下步骤:
S1:楼承钢板的夹持:
通过控制器启动伺服电机带动其顺时针旋转,由于其输出端与圆盘套接,圆盘和滑板分别与每个连杆的两端铰接,每个滑板均与两个滑轨滑动连接,从而通过两个连杆的牵引力使得两个滑板相互远离,然后将若干个钢板依次插入每两个限位卡块之间,此处,需要说明的是,每两个限位卡块具体指两个滑板上每两个对称设置的限位卡块,在放置楼承钢板时,将其底部放置在下搭接板的顶部,上抵紧板对楼承钢板的侧壁进行抵紧,两个弹性杆的作用是为了保证限位组件能对不同长度规格的楼承钢板进行夹紧,从而保证夹持效果,有利于提升钝化效率,当所有楼承钢板放置好后,通过控制器带动伺服电机逆时针旋转,因而通过两个连杆的牵引力使得两个滑板相互靠近,通过两个滑板将若干个楼承钢板的两侧夹紧,在滑板滑动时,伸缩管提供滑板调节空间。
S2:钝化工序的初步进行:
通过控制器启动驱动电机,因而通过其输出端带动第一齿轮旋转,由于螺杆与U型架转动连接,第二齿轮与螺杆转动连接,又因为第一齿轮与第二齿轮啮合连接,升降套筒与螺杆螺纹连接,升降套筒与U型架滑动连接,进而带动升降套筒下降,进而通过两个伸缩管带动两个滑板及两个滑板之间的若干个楼承钢板浸入反应池内,限位板和限位杆配合,起到限位效果,缓冲弹簧则保证升降套筒缓速下降,二者配合,保证若干个楼承钢板缓速浸入反应池内,有效防止浸泡液体溅出,避免污染等。
S3:钝化工序的依次推进:
若干个楼承钢板于加工箱内第一个反应池浸泡结束,即钝化的第一个工序完成后,通过控制器启动两个传动组件,从而带动两个升降套筒上升复位,即带动若干个楼承钢板从第一个反应池伸出,然后通过控制器启动步进电机,从而带动其输出端上的第一链轮旋转,由于每个第二链轮均与一个丝杆靠近步进电机的一端套接,第一链轮和两个第二链轮通过链条套接,进而带动两个丝杆旋转。
丝杆旋转时,由于丝杆与两个安装板均转动连接,滑块与丝杆螺纹连接,每个第二导向杆均与滑块插接,每个导向杆的两端与两个安装板固定连接,进而带动滑块滑动,由于若干个楼承钢板放置在两个滑块顶部之间的两个滑板上,因而通过两个滑板带动若干个楼承钢板水平滑动,当位置传感器滑动至与第二个反应池顶端外壁上的感应柱的轴线一致时,即表示若干个楼承钢板滑动至第二个反应池的正上方,此时,位置传感器将这一信号发送给控制器,从而通过控制器断电步进电机,停止前滑,然后通过控制器启动两个传动组件,带动两个升降套筒下降,进而带动两个滑板及其之间的若干个楼承钢板进入第二个反应齿内,即进行钝化的第二个工序,以此类推,以完成钝化的所有工序。
本发明的有益效果:
1.本发明通过设计U型架、两个升降套筒和两个传动组件,同时通过设计限位板、限位杆和伸缩弹簧,能够保证升降套筒缓速下降,保证若干个楼承钢板缓速浸入反应池内,有效防止浸泡液体溅出,避免污染等。
2.本发明通过设计驱动组件和滑动组件,并在滑板的底部设计位置传感器,在每个反应池的旁侧设计感应柱,当滑动组件带动滑板及其上夹持的楼承钢板滑动至相应的反应池的正上方时,位置传感器将这一信号发送给控制器,从而通过控制器断电驱动组件,停止前滑,然后通过控制器启动两个传动组件,带动两个升降套筒下降,进而带动两个滑板及其之间的若干个楼承钢板进入第二个反应齿内,即进行钝化的第二个工序,以此类推,以完成钝化的所有工序,相较于现有技术,本装置能使得楼承钢板的钝化工序按部就班,依次进行,更加精准的浸入每个反应池,不会出现工序错乱的情况,进而有利于提升楼承钢板的钝化效率、效果和成品质量。
3.本发明通过设计牵引组件、两个滑板和两个限位组件,在对楼承钢板夹持时,首先通过控制器启动牵引组件,带动两个滑板相互远离,从而方便楼承钢板插入若干个限位卡块之间,然后再通过控制器带动牵引组件复位,对楼承钢板进行夹紧,两个限位组件分别对楼承钢板的侧壁抵紧和对其底部搭接,防止钢板在浸泡时出现脱落的情况,进而提升钝化效率。
4.本发明通过设计限位组件,即下搭接板、上抵紧板和两个弹性杆,在放置楼承钢板时,将其底部放置在下搭接板的顶部,上抵紧板对楼承钢板的侧壁进行抵紧,两个弹性杆的作用是为了保证限位组件能对不同长度规格的楼承钢板进行夹紧,从而保证夹持效果,有利于提升钝化效率,相较于现有技术,限位组件的设计可针对多种形状和不同长度的钢板进行夹持,从而满足多种形状和不同长度的钢板的钝化要求,进一步提升了本装置的实用性和灵活性。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面对本发明实施例中的附图作简单地介绍。
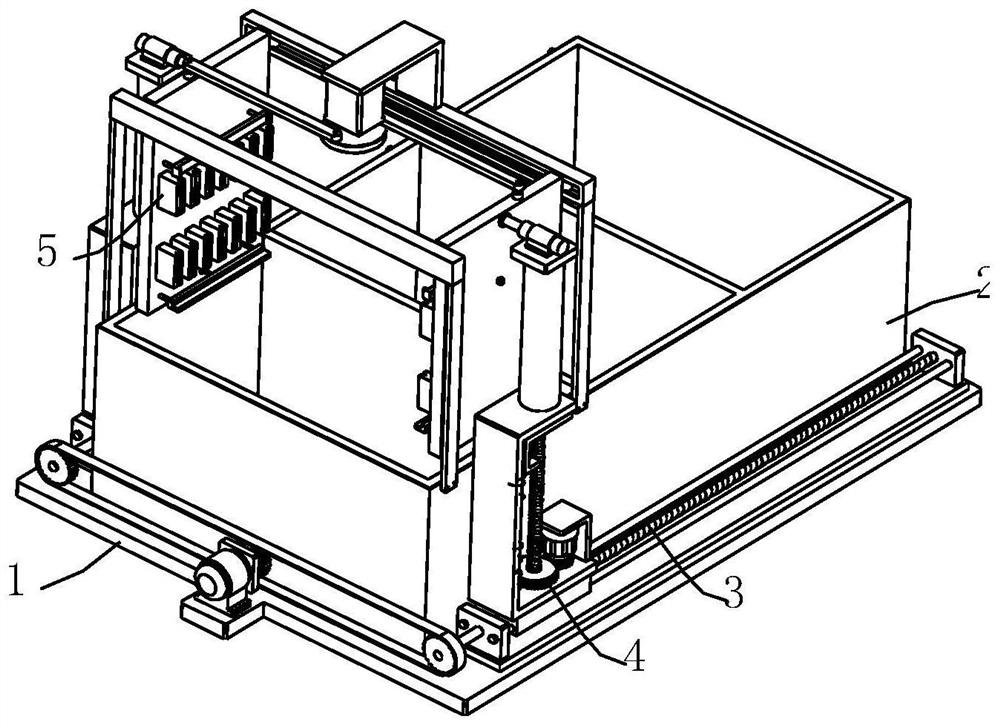
图1为本发明的立体结构示意图一;
图2为本发明的立体结构示意图二;
图3为图2中的A处放大图;
图4为图2中的B处放大图;
图5为本发明升降机构和夹持机构的侧视图;
图6为图5中的C处放大图;
图7为本发明牵引组件、两个滑板和两个限位组件的立体结构示意图;
图8为本发明滑板和限位组件的立体结构示意图;
图9为本发明两个滑板、两个限位组件和若干个楼承钢板的立体结构示意图;
图10为本发明弹性杆的平面剖视图;
图中:底座1,加工箱2,滑轨20,反应池21,感应柱210,滑动机构3,驱动组件30,第一链轮300,步进电机301,第二链轮302,链条303,滑动组件31,丝杆310,滑块311,第二导向杆312,升降机构4,U型架40,升降套筒41,伸缩管410,传动组件42,驱动电机420,第一齿轮421,第二齿轮422,螺杆423,限位板424,缓冲弹簧425,夹持机构5,牵引组件50,伺服单机500,圆盘501,连杆502,滑板51,位置传感器510,限位组件52,下搭接板520,上抵紧板521,弹性杆522,限位卡块523。
具体实施方式
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸。
参照图1至图10所示的一种楼承钢板加工用钝化装置,包括底座1和加工箱2,所述加工箱2设在底座1顶部,还包括控制器、滑动机构3、升降机构4和夹持机构5,所述滑动机构3设在底座1的顶部一带动楼承钢板滑动,滑动机构3包括驱动组件30和两个滑动组件31,所述升降机构4设在滑动机构3的顶部以带动楼承钢板升降,升降机构4包括两个U型架40、两个升降套筒41和两个传动组件42,每个U型架40均固定设在一个滑动组件31上,每个传动组件42均设在一个U型架40的内部,每个升降套筒41均滑动设置在一个U型架40的顶部,所述夹持机构5固定设在两个升降套筒41之间以用来夹持楼承钢板,夹持机构5包括牵引组件50、两个滑板51和两个限位组件52,每个升降套筒41的顶部均固定设有伸缩管410,加工箱2的两端呈对称设置有四个支撑杆,每两个支撑杆之间均固定设有滑轨20,每个滑板51均滑动设置在两个滑轨20之间,所述牵引组件50设在其中一个滑轨20的顶部,每个限位组件52均设在一个滑板51的外壁上,所述驱动组件30、传动组件42和牵引组件50与控制器均为电性连接。
所述牵引组件50包括伺服单机500、圆盘501和两个连杆502,其中一个滑轨20的顶部固定设有L型板,所述伺服电机固定设在L型板上,所述圆盘501套设在伺服电机的输出端上,每个连杆502均铰接设置在圆盘501的顶部,并且每个连杆502远离圆盘501的一端均与一个滑板51的顶部铰接,所述伺服电机与控制器电连接,当进行楼承钢板的钝化工作时,首先通过控制器启动伺服电机带动其顺时针旋转,由于其输出端与圆盘501套接,圆盘501和滑板51分别与每个连杆502的两端铰接,每个滑板51均与两个滑轨20滑动连接,从而通过两个连杆502的牵引力使得两个滑板51相互远离,当所有楼承钢板放置好后,通过控制器带动伺服电机逆时针旋转,因而通过两个连杆502的牵引力使得两个滑板51相互靠近,通过两个滑板51将若干个楼承钢板的两侧夹紧,在滑板51滑动时,伸缩管410提供滑板51调节空间。
所述限位组件52包括下搭接板520、上抵紧板521和两个弹性杆522,两个弹性杆522呈对称设置在滑板51的顶部和底部内壁上,所述下搭接板520和上抵紧板521分别固定设在两个弹性杆522远离升降套筒41的一端,每个弹性杆522的两侧均插设有两个第一导向杆,两个第一导向杆远离升降套筒41的一端分别与下搭接板520和上抵紧板521的外壁固定连接,在放置楼承钢板时,将其底部放置在下搭接板520的顶部,上抵紧板521对楼承钢板的侧壁进行抵紧,两个弹性杆522的作用是为了保证限位组件52能对不同长度规格的楼承钢板进行夹紧,从而保证夹持效果,有利于提升钝化效率,相较于现有技术,限位组件52的设计可针对多种形状和不同长度的钢板进行夹持,从而满足多种形状和不同长度的钢板的钝化要求,进一步提升了本装置的实用性。
所述下搭接板520和上抵紧板521之间呈对称设置有若干个限位卡块523,每个限位卡块523上均设有插槽,然后将若干个钢板依次插入每两个限位卡块523之间,此处,需要说明的是,每两个限位卡块523具体指两个滑板51上每两个对称设置的限位卡块523。
所述滑动组件31包括丝杆310、滑块311和两个第二导向杆312,底座1的顶部呈对称设置有两个安装板,所述丝杆310可转动的设置在两个安装板之间,两个第二导向杆312呈对称设置在两个安装板之间,所述滑块311螺纹连接在丝杆310上,并且每个第二导向杆312均与滑块311插接,当丝杆310旋转时,由于丝杆310与两个安装板均转动连接,滑块311与丝杆310螺纹连接,每个第二导向杆312均与滑块311插接,每个导向杆的两端与两个安装板固定连接,进而带动滑块311滑动。
所述驱动组件30包括第一链轮300、步进电机301和两个第二链轮302,所述步进电机301固定设在底座1的顶部,所述第一链轮300套设在步进电机301的输出端上,每个所述第二链轮302均套设在丝杆310靠近步进电机301的一端,第一链轮300和两个第二链轮302之间套设有链条303,所述步进电机301与控制器电连接,当若干个楼承钢板于加工箱2内第一个反应池21浸泡结束,即钝化的第一个工序完成后,通过控制器启动两个传动组件42,从而带动两个升降套筒41上升复位,即带动若干个楼承钢板从第一个反应池21伸出,然后通过控制器启动步进电机301,从而带动其输出端上的第一链轮300旋转,由于每个第二链轮302均与一个丝杆310靠近步进电机301的一端套接,第一链轮300和两个第二链轮302通过链条303套接,进而带动两个丝杆310旋转。
其中一个滑板51的底部外壁上固定设有位置传感器510,加工箱2的内部等间距设置有若干个反应池21,每个反应池21的顶端外壁上均固定设有感应柱210,所述位置传感器510与控制器电连接,当滑块311滑动时,由于若干个楼承钢板放置在两个滑块311顶部之间的两个滑板51上,因而通过两个滑板51带动若干个楼承钢板水平滑动,当位置传感器510滑动至与第二个反应池21顶端外壁上的感应柱210的轴线一致时,即表示若干个楼承钢板滑动至第二个反应池21的正上方,此时,位置传感器510将这一信号发送给控制器,从而通过控制器断电步进电机301,停止前滑,然后通过控制器启动两个传动组件42,带动两个升降套筒41下降,进而带动两个滑板51及其之间的若干个楼承钢板进入第二个反应齿内,即进行钝化的第二个工序,以此类推,以完成钝化的所有工序,相较于现有技术,本装置能使得楼承钢板的钝化工序按部就班,依次进行,更加精准的浸入每个反应池,不会出现工序错乱的情况,进而有利于提升楼承钢板的钝化效率、效果和成品质量。
所述传动组件42包括驱动电机420、第一齿轮421、第二齿轮422和螺杆423,所述驱动电机420固定设在U型架40的内侧底部,所述第一齿轮421套设在驱动电机420的输出端上,所述螺杆423可转动的设置在U型架40的内部,所述第二齿轮422套设在螺杆423的底部外壁上,第一齿轮421和第二齿轮422啮合连接,并且第一齿轮421比第二齿轮422小,并且升降套筒41的底部固定连接有限位板424,螺杆423穿过限位板424与升降套筒41的内壁螺纹连接,所述驱动电机420与控制器电连接,当楼承钢板被夹紧后,通过控制器启动驱动电机420,因而通过其输出端带动第一齿轮421旋转,由于螺杆423与U型架40转动连接,第二齿轮422与螺杆423转动连接,又因为第一齿轮421与第二齿轮422啮合连接,升降套筒41与螺杆423螺纹连接,升降套筒41与U型架40滑动连接,进而带动升降套筒41下降,进而通过两个伸缩管410带动两个滑板51及两个滑板51之间的若干个楼承钢板浸入反应池21内。
所述U型架40的内部还固定设有限位杆,所述缓冲弹簧425套设在限位杆的外壁上,限位板424的顶部和U型架40的内侧底部分别与缓冲弹簧425的两端抵触,限位板424和限位杆配合,起到限位效果,缓冲弹簧425则保证升降套筒41缓速下降,二者配合,保证若干个楼承钢板缓速浸入反应池21内,有效防止浸泡液体溅出,避免污染等。
一种楼承钢板加工用钝化装置的工作方法,包括以下步骤:
S1:楼承钢板的夹持:
通过控制器启动伺服电机带动其顺时针旋转,由于其输出端与圆盘501套接,圆盘501和滑板51分别与每个连杆502的两端铰接,每个滑板51均与两个滑轨20滑动连接,从而通过两个连杆502的牵引力使得两个滑板51相互远离,然后将若干个钢板依次插入每两个限位卡块523之间,此处,需要说明的是,每两个限位卡块523具体指两个滑板51上每两个对称设置的限位卡块523,在放置楼承钢板时,将其底部放置在下搭接板520的顶部,上抵紧板521对楼承钢板的侧壁进行抵紧,两个弹性杆522的作用是为了保证限位组件52能对不同长度规格的楼承钢板进行夹紧,从而保证夹持效果,有利于提升钝化效率,当所有楼承钢板放置好后,通过控制器带动伺服电机逆时针旋转,因而通过两个连杆502的牵引力使得两个滑板51相互靠近,通过两个滑板51将若干个楼承钢板的两侧夹紧,在滑板51滑动时,伸缩管410提供滑板51调节空间。
S2:钝化工序的初步进行:
通过控制器启动驱动电机420,因而通过其输出端带动第一齿轮421旋转,由于螺杆423与U型架40转动连接,第二齿轮422与螺杆423转动连接,又因为第一齿轮421与第二齿轮422啮合连接,升降套筒41与螺杆423螺纹连接,升降套筒41与U型架40滑动连接,进而带动升降套筒41下降,进而通过两个伸缩管410带动两个滑板51及两个滑板51之间的若干个楼承钢板浸入反应池21内,限位板424和限位杆配合,起到限位效果,缓冲弹簧425则保证升降套筒41缓速下降,二者配合,保证若干个楼承钢板缓速浸入反应池21内,有效防止浸泡液体溅出,避免污染等。
S3:钝化工序的依次推进:
若干个楼承钢板于加工箱2内第一个反应池21浸泡结束,即钝化的第一个工序完成后,通过控制器启动两个传动组件42,从而带动两个升降套筒41上升复位,即带动若干个楼承钢板从第一个反应池21伸出,然后通过控制器启动步进电机301,从而带动其输出端上的第一链轮300旋转,由于每个第二链轮302均与一个丝杆310靠近步进电机301的一端套接,第一链轮300和两个第二链轮302通过链条303套接,进而带动两个丝杆310旋转。
丝杆310旋转时,由于丝杆310与两个安装板均转动连接,滑块311与丝杆310螺纹连接,每个第二导向杆312均与滑块311插接,每个导向杆的两端与两个安装板固定连接,进而带动滑块311滑动,由于若干个楼承钢板放置在两个滑块311顶部之间的两个滑板51上,因而通过两个滑板51带动若干个楼承钢板水平滑动,当位置传感器510滑动至与第二个反应池21顶端外壁上的感应柱210的轴线一致时,即表示若干个楼承钢板滑动至第二个反应池21的正上方,此时,位置传感器510将这一信号发送给控制器,从而通过控制器断电步进电机301,停止前滑,然后通过控制器启动两个传动组件42,带动两个升降套筒41下降,进而带动两个滑板51及其之间的若干个楼承钢板进入第二个反应齿内,即进行钝化的第二个工序,以此类推,以完成钝化的所有工序。
本发明的工作原理:当进行楼承钢板的钝化工作时,首先通过控制器启动伺服电机带动其顺时针旋转,由于其输出端与圆盘501套接,圆盘501和滑板51分别与每个连杆502的两端铰接,每个滑板51均与两个滑轨20滑动连接,从而通过两个连杆502的牵引力使得两个滑板51相互远离,然后将若干个钢板依次插入每两个限位卡块523之间,此处,需要说明的是,每两个限位卡块523具体指两个滑板51上每两个对称设置的限位卡块523,在放置楼承钢板时,将其底部放置在下搭接板520的顶部,上抵紧板521对楼承钢板的侧壁进行抵紧,两个弹性杆522的作用是为了保证限位组件52能对不同长度规格的楼承钢板进行夹紧,从而保证夹持效果,有利于提升钝化效率,当所有楼承钢板放置好后,通过控制器带动伺服电机逆时针旋转,因而通过两个连杆502的牵引力使得两个滑板51相互靠近,通过两个滑板51将若干个楼承钢板的两侧夹紧,在滑板51滑动时,伸缩管410提供滑板51调节空间。
当楼承钢板被夹紧后,通过控制器启动驱动电机420,因而通过其输出端带动第一齿轮421旋转,由于螺杆423与U型架40转动连接,第二齿轮422与螺杆423转动连接,又因为第一齿轮421与第二齿轮422啮合连接,升降套筒41与螺杆423螺纹连接,升降套筒41与U型架40滑动连接,进而带动升降套筒41下降,进而通过两个伸缩管410带动两个滑板51及两个滑板51之间的若干个楼承钢板浸入反应池21内。
限位板424和限位杆配合,起到限位效果,缓冲弹簧425则保证升降套筒41缓速下降,二者配合,保证若干个楼承钢板缓速浸入反应池21内,有效防止浸泡液体溅出,避免污染等。
当若干个楼承钢板于加工箱2内第一个反应池21浸泡结束,即钝化的第一个工序完成后,通过控制器启动两个传动组件42,从而带动两个升降套筒41上升复位,即带动若干个楼承钢板从第一个反应池21伸出,然后通过控制器启动步进电机301,从而带动其输出端上的第一链轮300旋转,由于每个第二链轮302均与一个丝杆310靠近步进电机301的一端套接,第一链轮300和两个第二链轮302通过链条303套接,进而带动两个丝杆310旋转。
当丝杆310旋转时,由于丝杆310与两个安装板均转动连接,滑块311与丝杆310螺纹连接,每个第二导向杆312均与滑块311插接,每个导向杆的两端与两个安装板固定连接,进而带动滑块311滑动。
当滑块311滑动时,由于若干个楼承钢板放置在两个滑块311顶部之间的两个滑板51上,因而通过两个滑板51带动若干个楼承钢板水平滑动,当位置传感器510滑动至与第二个反应池21顶端外壁上的感应柱210的轴线一致时,即表示若干个楼承钢板滑动至第二个反应池21的正上方,此时,位置传感器510将这一信号发送给控制器,从而通过控制器断电步进电机301,停止前滑,然后通过控制器启动两个传动组件42,带动两个升降套筒41下降,进而带动两个滑板51及其之间的若干个楼承钢板进入第二个反应齿内,即进行钝化的第二个工序,以此类推,以完成钝化的所有工序。