电磁陀螺稳定推进系统方法及设备
文献发布时间:2023-06-19 11:14:36
发明人
J·A·马塞尔
J·S·奇门蒂
优先权要求
本申请要求于2018年8月26日提交的美国临时专利申请No.62/722,968的优先权的权益,该申请的全部内容通过参引并入本文。
技术领域
本发明涉及电力推进系统领域,该电力推进系统用于推进竖向起降(verticaltakeoff and landing,VTOL)航空器或极短起降(very short takeoff and landing,VSTOL)航空器。更具体地,本发明包括安装有推力产生陀螺仪的电动万向节,其在为VTOL/VSTOL飞行器提供动力时固有地稳定且有效。
背景技术
有几种已知的电动飞行器推进系统。这些电动飞行器推进系统中的大多数将多个电动马达连接至刚性地安装至其机身的旋翼/螺旋桨。VTOL/VSTOL电动飞行器平衡是通过改变其马达/旋翼之间的推力增强的。马达的速度通过包括3轴加速度计、磁力计和速率陀螺仪的航空电子设备控制。
先前,在具有VTOL/VSTOL能力的机身中使用的电动推进系统主要用于更通常地称为四旋翼直升机或多旋翼无人机的无人驾驶飞行器中。由于允许更大能量密度的电池技术的进步,具有更大旋翼/螺旋桨的更大电动马达可以用于产生足够的推力以提升飞行员。较高推力的推进系统的马达以极高的速率消耗能量,其中推进系统的总推力通常仅略超过飞行器和飞行员的总重量。推力对重量的裕度低,需要暴露的螺旋桨/旋翼。如果防护件安置在螺旋桨/旋翼的上方或下方,则总推力将减小,使得飞行器不能维持合理的飞行时间,并且可能不能产生足够的升力以用于起飞变化的大气条件(包括风、空气温度和高度),这可能极大地影响飞行器维持稳定性的能力,这进一步减少了飞行时间,原因在于飞行器必须努力维持控制。
虽然电池和航空电子设备的进步为电动个人航空器(electric personal airvehicle,PAV)创造了机会,但是马达和旋翼/螺旋桨在技术上落后于这些进步。本发明涉及用于PAV的新颖的自驱动推进系统,该新颖的自驱动推进系统是强大的、紧凑的、高效的和自稳定的,并且其极大地减少或消除了现有技术中的不可靠性。
发明内容
本发明包括用于推进具有VTOL和VSTOL能力的电动PAV、安装有陀螺系统的推力产生万向节。本发明构造成在通常由马达/螺旋桨占据的位置中连接至机身。本发明包括由飞轮构成的旋转组件,该飞轮在旋转时产生推力,这是因为飞轮的辐条具有正入射的翼型件横截面。飞轮由永磁体包围,从而为空转飞轮增加了电枢功能。附加地,磁体增加了潜在的角动量强度,这是因为磁体增加了陀螺仪飞轮的周边的重量。
在优选实施方式中,万向节安装件允许飞轮由于飞轮的陀螺进动而保持相对于水平线的竖向取向。结合到万向节中的是具有励磁线圈的定子,该励磁线圈作用在围绕飞轮的磁体上,从而产生驱动。
在一个实施方式中,护罩用于使飞轮在万向节中居中,并且防止飞行员和周围环境意外地与旋转组件相接触。
在一个实施方式中,控制万向节内部的定子上的励磁线圈是单独的微处理器,即,每个线圈对应一个微处理器,从而允许不受限制地切换马达的相位。
附图说明
在结合附图考虑时,通过参照以下详细描述将更好地理解本发明,同时将容易地理解本发明的这些及其他特征和优点,在附图中:
图1是示出了本发明的俯视图。
图2图示了本发明的仰视图。
图3呈现了本发明的侧视图。
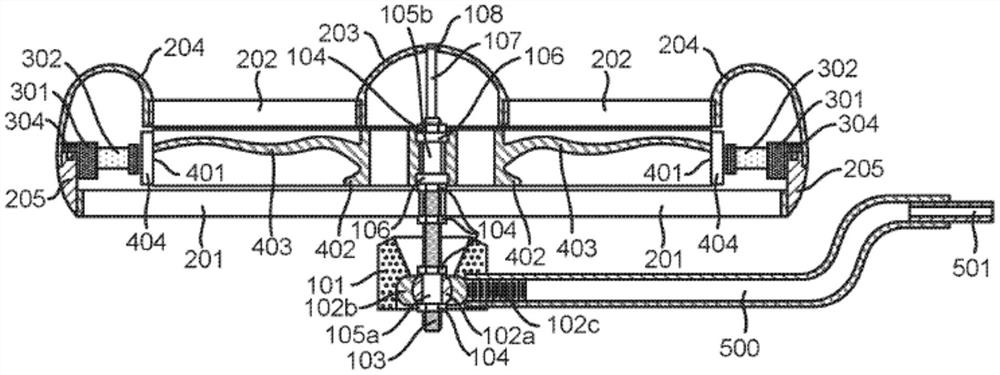
图4呈现了本发明的侧视截面图。
图5呈现了示出本发明的飞轮的俯视图,该飞轮具有附接的磁体。
图6图示了万向节的立体图。
图7呈现了万向节的横截面。
图8是万向节中的上防护件的俯视图。
图9是万向节中的下防护件的俯视图。
图10描绘了轴的分解图。
图11描绘了轴的旋转器安装部分的分解细节图。
图12是定子组件的俯视图。
图13是定子组件的截面图。
图14图示了飞轮/电枢和定子的俯视图。
图15呈现了万向节组件中的缓冲止动件的立体图。
图16描绘了万向节组件中的缓冲止动件的俯视图。
图17图示了万向节组件中的缓冲止动件的仰视图。
图18是万向节组件中的缓冲止动件的截面图。
图19是悬架臂的俯视图。
图20是万向节支架的截面图。
具体实施方式
这里使用的术语仅用于描述特定实施方式,而并非意在对本发明的限制。如本文所使用的,术语“和/或”包括相关联的所列项目中的一个或多个项目的任意和所有组合。如本文所使用的,单数形式“一”、“一个”和“该”旨在包括复数形式以及单数形式,除非上下文另有明确指示。将进一步理解的是,当在本说明书中使用时,术语“包括”和/或“包含”指定所陈述的特征、步骤、操作、元件和/或组件的存在,但不排除添加一个或多个其他特征、步骤、操作、元件、部件和/或其组。
除非另有定义,本文所使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域的普通技术人员通常理解的相同的含义。将进一步理解的是,诸如在常用词典中定义的那些术语应当被解释为具有与它们在相关领域和本公开的一个上下文中的含义相一致的含义,并且将不以理想化或过于正式的意义解释,除非在本文中明确地如此定义。
在描述本发明时,应当理解的是,公开了几种技术和步骤。这些技术和步骤中的每个技术和步骤具有单独的益处,并且每个技术和步骤还可以与其他公开的技术中的一种或多种技术(或在一些情况下全部技术)结合使用。因此,为了清楚起见,该描述将避免以不必要的方式重复各个步骤的每个可能的组合。然而,应当在理解这样的组合完全在本发明和权利要求的范围之内的情况下,阅读说明书和权利要求。
这里讨论了用于产生自调平、稳定和有效的推进系统的新的航空器陀螺推进系统方法及设备。在以下描述中,为了解释的目的,阐述了许多具体细节以便提供对本发明的透彻理解。然而,对于本领域技术人员明显的是,可以在没有这些具体细节的情况下实践本发明。
本公开被认为是本发明的示例,并非旨在将本发明限于下面的附图或描述所示的具体实施方式。
现在将通过参照表示优选实施方式的附图,对本发明进行描述。图4描绘了可以包括根据本发明的各种实施方式的自驱动航空器陀螺仪推进系统装置(“装置”)的元件的侧视截面图。在优选实施方式中,以图1俯视图、图2仰视图和图3侧视图示出的总组件包含配置有至少一个中央陀螺仪飞轮400的装置的元件中的每个元件,如图5所示。如参照图4和图5所示,飞轮400包括周边环401、中央毂部402和多个辐条403,其可以由轻质复合材料、铝、或另一种合适的材料制成。周边环401构造成沿着飞轮的外部周边接纳多个永磁体404。在一些实施方式中,竖向突出部将磁体分开,以均等地分割陀螺仪周边的表面区域。可以由钕或其他合适的磁性材料制成的磁体可以用适当的粘合剂或保持结构固定至飞轮周边。磁体在驱动器中产生飞轮的电枢功能。
中央毂部402构造成接纳多个滚柱轴承106,以允许围绕轴103旋转。在替代性实施方式中,飞轮围绕其周边支承有用于无毂设计的交叉轴承。当飞轮旋转时,由于辐条403的翼型件横截面具有正入射引起的定向气流,因此辐条403产生推力。在未示出的替代性实施方式中,辐条可以直接地或通过伺服机构围绕其纵向轴线旋转,以增加或减小辐条/叶片的入射,从而改变推力而不改变旋转速度。如果入射角被设置为零,则本发明停止产生推力,但是保持用于使连接结构稳定的陀螺效应。
在替代性实施方式中,当以无毂设计支承时,辐条和毂部可以被完全移除。在该构型中,稳定系统可以用作皮带部件,以在不使用交通工具的情况下,帮助使老年或残疾患者稳定进而防止跌倒。另外,稳定系统可以用于使任何当前的非航空运输或休闲车辆稳定。此外,稳定器系统可以用于使包括建筑物的静态结构稳定。在该替代性实施方式中,对于具有刚性安装件的万向节,铰接接头将是不必要的。
在替代性实施方式中,包括轮缘401、辐条/叶片403和毂部402的飞轮的各个零部件可以由包括复合材料的磁性材料构成,或浸渍有包括复合材料的磁性材料。该构型可以将磁性材料的重量集中在零部件的外侧边缘附近或外侧边缘处,以获得更大的陀螺效应。当辐条被磁化时,在一些设计中可以消除周边轮缘。
如进一步参照图6、图7和图9所示,在本发明的万向节组件200的优选实施方式中,万向节的元件包括螺纹万向节轴103和滚柱轴承106,其中螺纹万向节轴103用于支承万向节的刚性安装的部件,滚柱轴承106允许飞轮400围绕轴自由旋转。内部飞轮下防护件201结合有用于支承毂部402的多个辐条201a。如进一步参照图8所示,内部飞轮上防护件202结合有多个辐条202a和多个箍部202b,并且内部飞轮上防护件202在附接至旋转器203时,使毂部居中并支承毂部。防护件不仅在飞轮的毂部处使飞轮居中并支承飞轮,而且还通过防护辐条/叶片403保护本发明周围的直接环境。上防护件和下防护件的周边连接上周边部分204和下周边部分205,以形成万向节本体。具有旋转器203的万向节本体上部部分204优选地成形为将进入的气流引导到飞轮辐条/叶片403中,从而产生额外的升力。万向节将陀螺仪推力与其进动对准,从而允许推力矢量与飞行器姿态分离,以实现VTOL/VSTOL个人航空器的稳定性和易于控制性。
在替代性实施方式中,内部飞轮上防护件202和内部飞轮下防护件201结合有支承外部万向节本体和内部毂部所需的最小辐条和箍部,从而允许飞轮辐条/叶片403更多地暴露于不需要额外保护的直接环境,例如在竞速应用中。
万向节可以由轻质复合材料、铝、或任何其他合适的材料构成。
图12、图13和图14示出了根据本发明的各种实施方式,可以包括位于万向节本体中的定子组件300的元件。在优选实施方式中,定子组件包括定子301和产生磁场的场线圈302,其中定子301可以由包含铁元素、铁或另一合适材料的复合材料制成。如进一步参照图4所示,穿透部303使得硬件304能够将定子组件固定至下周边部分205,该硬件可以包括螺栓、螺钉、铆钉或合适的粘结粘合剂。励磁线圈302由微处理器单独控制以产生相磁场,该相磁场在作用于飞轮/电枢的集成永磁体404时,引起飞轮/电枢的旋转。由于励磁线圈中的每个励磁线圈被独立地控制,因此可以基于驱动器的需要在本发明的操作期间进行相位改变,例如从3个相位改变至4个相位。
在替代性实施方式中,可以使用单个控制器产生3相或4相交流电场。
在替代性实施方式中,通过激励单个或接近的励磁线圈组,可以在装置的操作中产生不平衡,这将产生更通常称为偏置驱动的单个矢量化力。该偏置驱动力可以在具有或不具有飞轮的产生推力的辐条/叶片的情况下产生。偏置驱动构型可以通过无毂设计中的中央毂部或外部轴承支承。
在优选实施方式中,再生线圈可以位于励磁线圈附近,以通过利用由励磁线圈产生的未使用的磁能并将其转换成循环回电池的电能,从而增加效率。这些再生线圈可以围绕励磁线圈盘绕或者沿着励磁线圈结合,以产生两股励磁线圈,一股用于能量输入,第二股用于能量输出,这类似于DNA的双螺旋。另一解决方案是使再生线圈定向在任意位置,使得其可以受到产生磁场的励磁线圈的影响。
在替代性实施方式中,定子的所有元件或一些元件被封装在树脂基质碳纤维复合材料或类似材料中,从而允许定子构造成具有无数形状和尺寸的层。这些层将作为固体或作为颗粒将各种组成部分整合在树脂基质中。
优选的轴组件的分解图参照图10和图11示出。轴组件优选地由轻质复合材料、铝、或任何其他合适的材料制成,并且可以用于连接至万向节和旋翼的硬件优选地包括螺栓104、下管状间隔件105a和上管状间隔件105b、滚柱轴承106、鼻锥支承件107和保持器卡环108。
进一步参照图15至图20对本发明的各种实施方式进行描述。示出了根据本发明的各种实施方式的万向节安装件600。在优选实施方式中,螺纹轴103将万向节本体连接至接头球旋转件102a,该接头球旋转件102a允许万向节保持陀螺仪的竖向取向,而不管机身的取向如何。接头球旋转件优选地容纳在允许运动自由的刚性壳体中。悬架臂500将万向节安装件连接至机身。万向节与机身之间的最大角度由参照图15至图18所示的缓冲件安装件控制,该缓冲件安装件优选地由橡胶、复合材料、或另一种合适的材料制成,并且基于内锥尺寸限制运动。
通过使推进系统安装在万向节中,而万向节安装至悬架臂中的铰接接头,其又进一步连接至交通工具(例如连接至PAV),由陀螺推进产生的角动量使推进系统保持竖向取向,这继而使推力保持竖向取向,而不管其所连接的交通工具取向如何。
在利用铰接接头的实施方式中,穿过铰接接头的中央轴的竖向取向可以通过伺服机构或通过来自驱动器(未示出)的直接连接而倾斜,其中该驱动器迫使推进系统脱离其最自然的平衡状态,这导致定向推力或矢量推力。
为了消除万向节由于旋转扭矩引起的旋转,铰接接头可以被锁定以防止旋转,或者可以将元件添加至万向节上,这些元件将对机翼或安装件(未示出)造成冲击以消除这种可能性。
在替代性实施方式中,万向节本体从其周边悬挂,而不是在多个位置悬挂在中央轴上,这允许装置枢转并以360度旋转。
在替代性实施方式中,本发明刚性地安装至机身,从而将其取向固定至机身。
在替代性实施方式中,当风或水使无动力飞轮旋转时,电磁陀螺稳定推进方法及设备可以用于发电。