一种小空间升降脚手架及施工方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及建筑施工技术领域,尤其涉及一种小空间升降脚手架及施工方法。
背景技术
随着房地产行业的蓬勃发展,建筑施工外脚手架技术也突飞猛进。建筑住宅对于采光及造型的要求越来越高,因此,建筑物外立面的异形也越来越多。现阶段建筑施工领域,附着式升降脚手架凭借其更高的科技含量和更经济、更安全、更便捷等特点迅速获得了越来越多的应用。但是对于造型特殊的建筑,特殊部位无法使用附着式升降脚手架,对于一些狭小空间,例如住宅楼的狭长U型采光井等,因宽度过小也无法安装附着式升降脚手架。若采用悬挑脚手架就失去了附着式脚手架的优势。
现有技术中对于形状特殊的建筑外立面的施工方法存在以下问题,一是需要施工人员高空作业,安全性低,且墙体留置的洞口较大,存在渗漏风险,质量隐患多。二是脚手架的搭建和拆卸难度大,使用不方便,施工效率低,影响施工进度,同时材料使用量较大,需要的人工多,经济性差。
发明内容
基于以上问题,本发明的一个目的在于提供一种小空间升降脚手架,可以适用于狭小的施工空间,解决了狭小空间搭设升降脚手架困难的问题,且安装方便,安全性高。
本发明的另一个目的在于提供一种小空间升降脚手架施工方法,能够实现脚手架的快速搭设,提高施工效率,保证施工进度。
为达上述目的,本发明采用以下技术方案:
一种小空间升降脚手架,包括:
脚手架组件,包括第一脚手板、第二脚手板和脚手管,所述第一脚手板位于所述脚手管的底部,所述第二脚手板位于所述脚手管的顶部;
第一支撑组件,包括框架结构,所述第一脚手板置于所述框架结构上,所述脚手管与所述框架结构连接;
第二支撑组件,包括多个支撑杆,每个所述支撑杆的一端均贯穿墙体,并与所述墙体可拆卸连接,另一端水平悬伸,所述框架结构安装于多个所述支撑杆上。
作为本发明的小空间升降脚手架的优选方案,每个所述支撑杆上均设置有止挡件,所述止挡件能够与所述墙体的内侧壁贴靠,并与所述支撑杆可拆卸连接。
作为本发明的小空间升降脚手架的优选方案,所述框架结构相对的两侧均设置有多个限位件,每个所述限位件均对应与一个所述支撑杆卡接,以将所述框架结构限位于多个所述支撑杆上。
作为本发明的小空间升降脚手架的优选方案,所述限位件包括间隔设置的第一限位杆和第二限位杆,所述支撑杆夹设于所述第一限位杆和所述第二限位杆之间。
作为本发明的小空间升降脚手架的优选方案,所述脚手管包括多个脚手横管和多个脚手竖管,所述框架结构相对的两侧均设置有多个定位件,多个所述定位件均位于所述框架结构背向所述支撑杆的一面,每个所述脚手竖管均对应插设于一个所述定位件上。
作为本发明的小空间升降脚手架的优选方案,所述框架结构上设置有多个钩挂件,所述钩挂件被配置为与起吊设备连接,以升降所述框架结构。
作为本发明的小空间升降脚手架的优选方案,所述第一脚手板和所述第二脚手板均包括拼接的第一板和第二板,所述第一脚手板的第一板和第二板上均设置有多个避让孔,多个所述钩挂件和多个所述定位件均对应穿过一个所述避让孔。
作为本发明的小空间升降脚手架的优选方案,所述第一支撑组件还包括多个支撑梁,多个所述支撑梁沿所述框架结构的长度方向间隔设置,所述第一脚手板的第一板和第二板均与多个所述支撑梁贴靠。
作为本发明的小空间升降脚手架的优选方案,所述小空间升降脚手架还包括多个连墙件,所述脚手架组件通过多个所述连墙件固定于所述墙体上。
一种小空间升降脚手架施工方法,包括以下步骤:
S1、在预设安装位置将多个支撑杆分别插入墙体上的模板螺栓孔,并将支撑杆固定在墙体上;
S2、将第一脚手板固定在框架结构上,再将固定好第一脚手板的第一支撑组件吊至预设安装位置,并置于多个支撑杆上,框架结构与多个支撑杆固定;
S3、在第一支撑组件上搭设脚手架组件,脚手管的底部固定在框架结构上,脚手管的顶部铺设第二脚手板;
S4、将脚手架组件的脚手管与墙体连接固定;
S5、脚手架组件首次使用完成后,解除其与墙体的连接,采用起吊设备将脚手架组件和第一支撑组件吊至下一施工位置,同时拆除多个支撑杆,并重复步骤S1-S4。
本发明的有益效果为:
本发明提供的小空间升降脚手架施工方法,在施工时,首先将多个支撑杆在预设安装位置分别插入墙体上已有的模板螺栓孔内,并将支撑杆固定在墙体上。其次,在框架结构上安装第一脚手板,并使用起吊设备将其整体吊至预设安装位置,框架结构安装于多个支撑杆上,固定框架结构。然后,在框架结构上搭设脚手架组件,并在脚手管的顶部铺设第二脚手板,同时将脚手管与墙体固定在一起。当前位置施工完成后,将第一支撑组件和脚手架组件吊离至下一施工位置,并拆除多个支撑杆安装至下一施工位置即可,实现脚手架的升降,该升降脚手架可与附着式升降脚手架搭配使用,提高了施工效率,保证施工进度。
本发明提供的小空间脚手架能够适用于狭小的施工空间,安装方便,避免施工人员长时间高空作业,提高施工安全性。并且该升降脚手架利用墙体施工时留下的模板螺栓孔安装多个支撑杆,无需额外在墙体上打孔,不会损坏墙体结构,避免发生渗漏等问题,保证施工质量。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对本发明实施例描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据本发明实施例的内容和这些附图获得其他的附图。
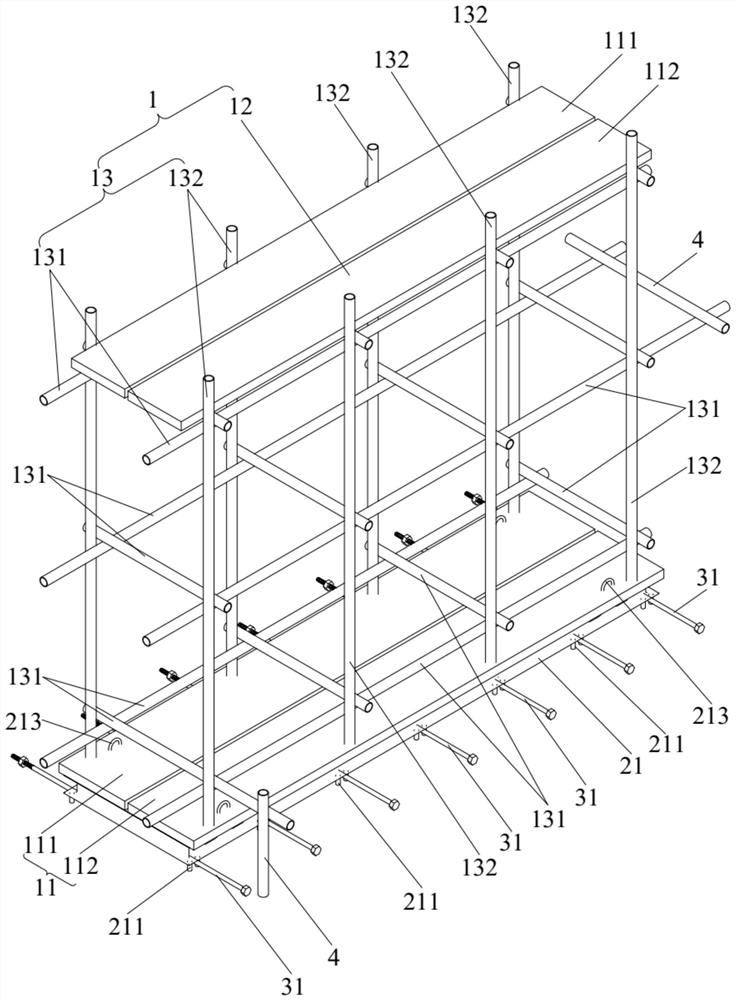
图1是本发明具体实施方式提供的小空间升降脚手架的第一支撑组件和第二支撑组件的结构示意图;
图2是图1中A处的局部放大图;
图3是本发明具体实施方式提供的小空间升降脚手架的安装示意图;
图4是本发明具体实施方式提供的小空间升降脚手架施工方法的流程图。
图中:
1-脚手架组件;2-第一支撑组件;3-第二支撑组件;4-连墙件;
11-第一脚手板;12-第二脚手板;13-脚手管;
111-第一板;112-第二板;131-脚手横管;132-脚手竖管;
21-框架结构;22-支撑梁;
211-限位件;212-定位件;213-钩挂件;
2111-第一限位杆;2112-第二限位杆;
31-支撑杆;32-止挡件;
具体实施方式
为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面将结合附图对本发明实施例的技术方案作进一步的详细描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、仅用于描述目的,而不能理解为指示或暗示相对重要性。其中,术语“第一位置”和“第二位置”为两个不同的位置。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
如图1至图3所示,本实施例提供一种小空间升降脚手架,可以适用于狭小的施工空间,该小空间升降脚手架包括脚手架组件1、第一支撑组件2和第二支撑组件3。
其中,脚手架组件1包括第一脚手板11、第二脚手板12和脚手管13,第一脚手板11位于脚手管13的底部,第二脚手板12位于脚手管13的顶部;第一支撑组件2包括框架结构21,第一脚手板11置于框架结构21上,脚手管13与框架结构21连接;第二支撑组件3包括多个支撑杆31,每个支撑杆31的一端均贯穿墙体,并与墙体可拆卸连接,另一端水平悬伸,框架结构21安装于多个支撑杆31上。
对于建筑外立面异形,特殊部位施工空间有限等,无法使用附着式升降脚手架的情况,本实施例提供的小空间脚手架都可适用,且安装方便,避免施工人员长时间高空作业,能够提高施工安全性。同时该升降脚手架利用墙体施工时留下的模板螺栓孔安装多个支撑杆31,无需额外在墙体上打孔,不会损坏墙体结构,避免发生渗漏等问题,保证施工质量。本实施例的小空间升降脚手架的各部分组件均可重复使用,提高材料利用率,降低施工成本。
本实施例中,优选地,框架结构21采用槽钢加工而成,在保证其具有足够强度的同时,能够减轻重量。
如图1和图2所示,可选地,每个支撑杆31上均设置有止挡件32,止挡件32能够与墙体的内侧壁贴靠,并与支撑杆31可拆卸连接。安装支撑杆31时,将支撑杆31的一端伸入模板螺栓孔,并穿过墙体。在支撑杆31穿过墙体的一端安装止挡件32,以固定支撑杆31,防止支撑杆31脱离墙体。本实施例中,优选地,支撑杆31穿过墙体的一端设置有一段外螺纹,止挡件32与支撑杆31螺纹连接,方便安装和拆卸。进一步地,止挡件32优选为螺母。
如图1所示,可选地,框架结构21相对的两侧均设置有多个限位件211,每个限位件211均对应与一个支撑杆31卡接,以将框架结构21限位于多个支撑杆31上。具体地,限位件211包括间隔设置的第一限位杆2111和第二限位杆2112,支撑杆31夹设于第一限位杆2111和第二限位杆2112之间。本实施例中,优选地,框架结构21为矩形框,框架结构21的两条长边上均设置多个限位件211,一个支撑杆31对应与框架结构21两侧相对的两个限位件211卡接。进一步地,第一限位杆2111和第二限位杆2112均焊接在框架结构21上,第一限位杆2111与第二限位杆2112之间的间距与支撑杆31的直径尺寸相匹配,保证支撑杆31能够刚好卡入第一限位杆2111和第二限位杆2112之间。示例性地,支撑杆31的数量为7根,相应地,限位件211的数量为14个。在其他实施例中,可根据具体施工空间的大小设置支撑杆31的数量,这里不对其数量做限定。
如图1和图3所示,可选地,脚手管13包括多个脚手横管131和多个脚手竖管132,框架结构21相对的两侧均设置有多个定位件212,多个定位件212均位于框架结构21背向支撑杆31的一面,每个脚手竖管132均对应插设于一个定位件212上。进一步地,小空间升降脚手架还包括多个脚手扣件(图未示),脚手横管131和脚手竖管132之间通过脚手扣件连接。本实施例中,定位件212优选为焊接在框架结构21上的钢筋棍。搭设脚手架组件1时,先将脚手竖管132的底端套设在定位件212上,以对脚手竖管132进行定位,定位件212的数量与脚手竖管132的数量相匹配。然后,通过脚手扣件将多个脚手横管131与多个脚手竖管132固定在一起,完成脚手架的搭建。最后,在搭建好的脚手管13的顶部铺设第二脚手板12。
可选地,框架结构21上设置有多个钩挂件213,钩挂件213被配置为与起吊设备连接,以升降框架结构21。在升降并安装框架结构21时,将起吊设备的连接端与多个钩挂件213连接,通过多个钩挂件213将框架结构21吊离至预设安装位置,方便对脚手架进行升降操作。本实施例中,钩挂件213设置有四个,分布于框架结构21的四个角上。优选地,钩挂件213为焊接在框架结构21上的吊环。在其他实施例中,钩挂件213也可以是吊钩等。
如图3所示,可选地,第一脚手板11和第二脚手板12均包括拼接的第一板111和第二板112,第一脚手板11的第一板111和第二板112上均设置有多个避让孔(图未示),多个钩挂件213和多个定位件212均对应穿过一个避让孔。通过在第一脚手板11的第一板111和第二板112上设置避让孔,将第一脚手板11安装于框架结构21上时,钩挂件213和定位件212均可以对第一板111和第二板112进行限位,防止第一脚手板11偏离框架结构21,保证第一脚手板11的支撑稳定性,提高施工安全性。
如图1所示,可选地,第一支撑组件2还包括多个支撑梁22,多个支撑梁22沿框架结构21的长度方向间隔设置,第一脚手板11的第一板111和第二板112均与多个支撑梁22贴靠。即多个支撑梁22的上端面与框架结构21的上端面在同一水平面内,第一脚手板11的底面与该水平面贴靠。本实施例中,优选地,多个支撑梁22包括槽钢和角钢,槽钢和角钢隔位分布。即保证相邻的两个支撑梁22一个为槽钢,另一个为角钢。这种设置方式一是可以保证对第一脚手板11的支撑稳定性,避免因支撑梁22数量过少而导致第一脚手板11受力时弯曲变形。二是可以减少材料用量,节省施工成本。
如图3所示,可选地,小空间升降脚手架还包括多个连墙件4,脚手架组件1通过多个连墙件4固定于墙体上。脚手管13搭设完成后,在适当的位置,借助窗口等部位,利用连墙件4将脚手管13与墙体连接,保证整个脚手架组件1的稳定性。同时,将本实施例的脚手架与相同高度位置的附着式升降脚手架连接,方便施工人员施工。
如图4所示,本实施例提供一种小空间升降脚手架施工方法,采用如上所述的小空间升降脚手架进行施工,包括以下步骤:
S1、在预设安装位置将多个支撑杆31分别插入墙体上的模板螺栓孔,并将支撑杆31固定在墙体上;
S2、将第一脚手板11固定在框架结构21上,再将固定好第一脚手板11的第一支撑组件2吊至预设安装位置,并置于多个支撑杆31上,框架结构21与多个支撑杆31固定;
S3、在第一支撑组件2上搭设脚手架组件1,脚手管13的底部固定在框架结构21上,脚手管13顶部铺设第二脚手板12;
S4、将脚手架组件1的脚手管13与墙体连接固定;
S5、脚手架组件1首次使用完成后,解除其与墙体的连接,采用起吊设备将脚手架组件1和第一支撑组件2吊至下一施工位置,同时拆除多个支撑杆31,并重复步骤S1-S4。
本实施例提供的小空间升降脚手架施工方法,可实现脚手架的快速安装和升降,可与附着式升降脚手架搭配使用,提高了施工效率,能够保证施工进度。
具体的施工过程如下:
首先,将多个支撑杆31在预设安装位置分别插入墙体上已有的模板螺栓孔内,并使用止挡件32将支撑杆31固定在墙体上。其次,在框架结构21上安装第一脚手板11,依次将第一脚手板11的第一板111和第二板112置于框架结构21上,框架结构21上的钩挂件213和定位件212对应穿过第一板111和第二板112上的避让孔,以对第一脚手板11进行限位。第一脚手板11固定好后,使用起吊设备钩挂框架结构21上的钩挂件213,将框架结构21连同第一脚手板11整体吊至预设安装位置,并将框架结构21置于多个支撑杆31上。框架结构21上的限位件211刚好与支撑杆31卡接,以将框架结构21固定。然后,在框架结构21上搭设脚手架组件1,将多个脚手竖管132对应插设于定位件212上,通过脚手扣件将脚手横管131与脚手竖管132固定在一起,脚手管13搭设完成,之后在脚手管13的顶部依次铺设第二脚手板12的第一板111和第二板112。最后,借助窗口等部位,使用连墙件4将脚手管13与墙体固定在一起,同时将本脚手架与相同高度位置的附着式升降脚手架连接在一起即可正常施工。
待当前位置施工完成后,先将连墙件4与墙体的连接解除,同时将该升降脚手架与附着式升降脚手架的连接也断开。然后,将第一支撑组件2和脚手架组件1吊离至下一施工位置,再拆除多个支撑杆31并重复上述步骤,将其安装至下一施工位置即可,实现脚手架的升降。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。