一种空间凸轮式惯容器
文献发布时间:2023-06-19 11:47:31
技术领域
本发明属于振动控制技术领域,具体涉及一种空间凸轮式惯容器。
背景技术
目前已有多种实现机制能模拟惯容的力学行为,如滚珠丝杠型惯容、齿轮齿条型惯容、调谐液体型惯容以及基于滚筒设计的颗粒阻尼惯容系统等。其中,利用平动到转动的运动形式转换装置主要为滚珠丝杠型惯容和齿轮齿条型惯容,现有的惯容及惯容系统相关专利也多采用这种形式。齿轮齿条型惯容主要通过齿轮与齿条之间的啮合来实现运动的转换,这种结构形式对惯容系数的放大效果较弱。而滚珠丝杠型惯容虽然能够实现更优越的质量增效效果,但是机械构造复杂,加工精度高,制作成本高。
发明内容
本发明的目的就是提供一种空间凸轮式惯容器,能够实现质量强增效,但机械形式简单,易于实施,且能够实现惯容系数可调性。
本发明的目的通过以下技术方案实现:
一种空间凸轮式惯容器,所述惯容器包括固定轴、旋转筒和可移动的移动杆,所述旋转筒套设在固定轴外,所述旋转筒的外侧壁上沿周向设有螺旋通槽,所述移动杆垂直于固定轴的轴线设置,所述移动杆的端部沿固定轴的轴线方向可移动地位于螺旋通槽中。
所述移动杆邻近旋转筒的端部设有球头,所述球头位于螺旋通槽中。球头表面呈圆弧,避免移动杆在移动过程中与螺旋通槽的侧壁进行碰撞,从而磨损移动杆或旋转筒。
所述螺旋通槽的宽度和球头的外径相一致,使球头和螺旋通槽的侧壁有更多的接触面积,从而使旋转筒更易推动。
所述惯容器还包括设于移动杆端部的移动轴,所述移动轴平行于固定轴的轴线并远离旋转筒设置。通过移动移动轴,即可推动移动杆进行移动。
所述飞轮的外径大于旋转筒的外径。考虑到旋转筒的轴向长度较长(旋转筒设置成较长的长度,是为了可以对螺旋通槽的条数、螺距和宽度等进行调整),为了避免惯容器整体过长影响其应用场景,因此将飞轮的厚度设置成较薄的(此处的“薄”是相对于旋转筒而言),而将飞轮的外径设置成比旋转筒的外径大,使得飞轮对整个惯容器的惯容系数的影响程度可以基本和旋转筒对整个惯容器的惯容系数的影响程度相一致。
所述惯容器还包括成对的飞轮,成对的飞轮分别设于旋转筒的两侧并和固定轴的轴线相垂直。
所述旋转筒两端的外侧壁上可拆卸设有多个用于连接飞轮的连接件。连接件可拆卸(连接件可通过螺栓分别与旋转筒和飞轮进行连接),从而实现飞轮的拆卸。
所述连接件包括呈垂直设置的第一连接部和第二连接部,所述第一连接部和飞轮相连接,所述第二连接部和旋转筒相连接。该连接件类似于合页,只是一连接部和第二连接部之间不采用铰接,直接是固定连接。
所述螺旋通槽的螺距大于螺旋通槽的宽度。
所述旋转筒和固定轴之间采用轴承进行连接,可实现固定轴固定,而旋转筒进行旋转。
所述固定轴的两端突出于旋转筒设置,便于固定轴固定在其他构件上,从而使空间凸轮式惯容器能够进行应用。
本发明提出一种空间凸轮式惯容器,利用空间凸轮机械形式(凸轮机械形式包括凸轮、从动件和机架)来实现惯容力学行为,能够实现运动形式由平动到转动的转换,进而实现惯容元件的两端点惯性特征。所述惯容器中具有螺旋通槽的旋转筒相当于空间凸轮机械形式中的凸轮,移动杆和移动轴对应从动件,固定轴则对应机架。但是本发明的惯容器本质则是逆向利用了空间凸轮机械形式,即所述惯容器在实际工作中以移动杆和移动轴作为主动件,而具有螺旋通槽的旋转筒作为凸轮和从动件随主动件运动。这种惯容器的出力与两端点间的相对加速度成比例,比值为惯容系数。所述惯容器的惯容系数推导过程如下:
假定旋转筒的外径按螺旋通槽最深处到旋转筒的轴线距离计算,设为r
由于旋转筒的旋转角加速度
则旋转筒的旋转角加速度
旋转筒的转动惯量J
飞轮的转动惯量J
当旋转筒带动飞轮以旋转角加速度
根据力的平衡,可推导得移动轴上施加的水平力F
式中,
则将式(6)、(8)代入式(7),可整理为
惯容器的出力表达式为
F
式中,m
该装置的惯容系数同时来源于旋转筒和飞轮(若无飞轮,则来源于旋转筒),通过调整空间凸轮式惯容器中旋转筒的参数、螺旋通槽的参数以及飞轮的参数能够高效放大惯容器的惯容系数,实现质量强增效,且机械形式简单,易于实施。此外,附加飞轮的使用能够实现惯容器的惯容系数可调性,实际应用过程中可按需拆卸飞轮,进而对惯容系数进行调整,而不用更换整个装置,在实现质量强增效的同时还能够增加装置在实际应用过程中的灵活性,即惯容系数可调整性。
附图说明
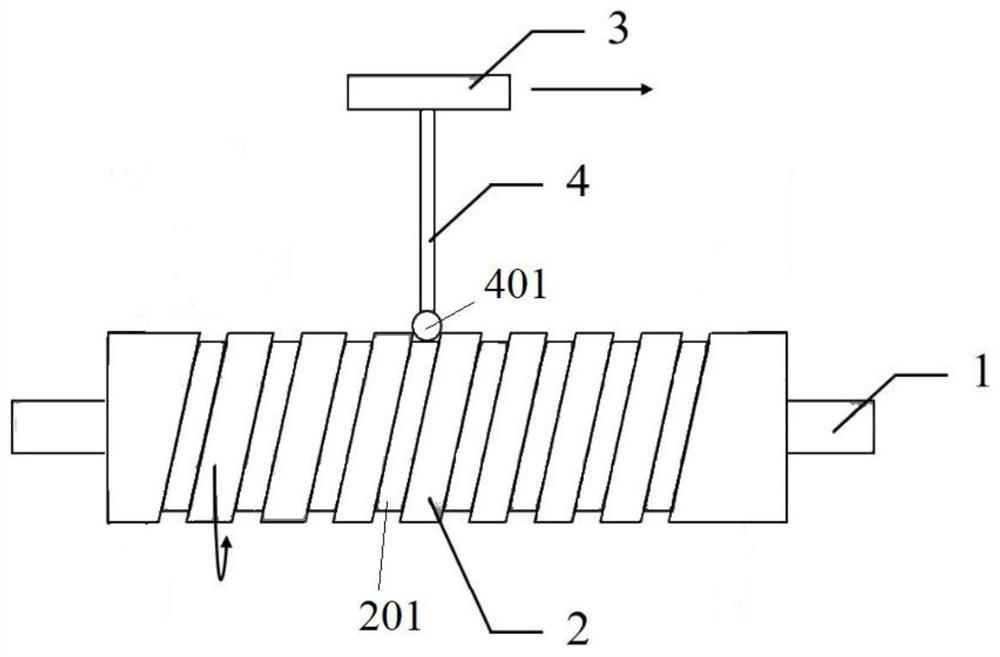
图1为实施例1中的空间凸轮式惯容器的结构示意图;
图2为实施例2中的空间凸轮式惯容器的结构示意图。
图中:1-固定轴;2-旋转筒;201-螺旋通槽;3-移动轴;4-移动杆;401-球头;5-连接件;501-第一连接部;502-第二连接部;6-飞轮。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。
实施例1
如图1所示,一种空间凸轮式惯容器,包括固定轴1、旋转筒2、可移动的移动杆4和移动轴3,旋转筒2套设在固定轴1外,固定轴1的两端突出于旋转筒2设置,旋转筒2和固定轴1之间可采用轴承进行连接,旋转筒2的外侧壁上沿周向设有螺旋通槽201,移动杆4垂直于固定轴1的轴线设置,移动杆4邻近旋转筒2的端部设有球头401,球头401沿固定轴1的轴线方向可移动地位于螺旋通槽201中,螺旋通槽201的宽度和球头401的外径相一致,螺旋通槽201的螺距大于螺旋通槽201的宽度,移动轴3设于移动杆4上远离旋转筒2的端部并平行于固定轴1的轴线。
如图1所示(本实施例只示例性地给出空间凸轮式惯容器呈水平放置这一应用场景,具体的放置方位可根据实际情况进行设置),螺旋通槽201自左下方向右上方进行螺旋,当移动轴3(移动轴通过外界的驱动进行移动)带着移动杆4和球头401向右水平移动时,旋转筒2被带动着进行旋转(自左向右看,旋转筒2此时的旋转方向为顺时针)。在应用场景中,移动轴3的移动方向可以根据实际情况进行选择和设置,得到的惯容器的惯容系数的公式具体见发明内容,公式中关于飞轮的部分均取0即可。
实施例2
如图2所示,一种空间凸轮式惯容器,除了还包含成对的飞轮6和多个连接件5以外,其余均与实施例1相同,成对的飞轮6分别设于旋转筒2的两侧并和固定轴1的轴线相垂直(本实施例中飞轮6的外径不大于固定轴1到移动轴3之间的距离,避免影响移动轴3的移动),飞轮6的外径大于旋转筒2的外径,旋转筒2两端的外侧壁上设有多个用于连接飞轮6的连接件5,连接件5包括呈垂直设置的第一连接部501和第二连接部502,第一连接部501和飞轮6相连接,第二连接部502和旋转筒2相连接。
如图2所示,螺旋通槽201自左下方向右上方进行螺旋,当移动轴3带着移动杆4和球头401向右水平移动时,旋转筒2被带动着进行旋转(自左向右看,旋转筒2和飞轮6此时的旋转方向均为顺时针),进而带动飞轮6进行旋转。在应用场景中,移动轴3的移动方向可以根据实际情况进行选择和设置,得到的惯容器的惯容系数的公式具体见发明内容。
本发明提出的空间凸轮式惯容器在实施时可对装置各项参数以及连接形式进行灵活调整。例如,旋转筒5和飞轮6的连接形式不限于图1中所示的连接形式,惯容器的惯容系数可以通过对旋转筒2上螺旋通槽201的螺距、宽度、螺旋方向以及飞轮6的质量、尺寸大小等参数的设计来灵活调整。
上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和使用发明。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。