颅脑手术定向导航系统及其使用方法
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及一种脑部手术辅助装置,具体地说是一种颅脑手术定向导航系统及其使用方法。
背景技术
因脑组织结构复杂,功能哑区少,所以颅脑手术需要在尽可能少牵拉、少损伤脑组织的前提下进行操作,术野狭小,视野差。因此在手术中,特别是在进行脑深部手术操作时容易迷路,造成不必要的医源性损伤。目前各地开展的血肿穿刺引流手术,一部分基层医院受高价医疗设备限制,多数术者根据经验采用盲穿手术,或者简易定位尺进行定位手术,存在穿刺方向及深度偏差的风险,医源性损伤发生概率极高,存在极大的医疗风险。少部分医院采用有框立体定向头架进行手术,虽然可以提升手术的精确程度,但是,其术前准备繁杂,占用时间长,严重拖延了救治的黄金时间,因为随着时间的延长,会造成大量脑组织坏死,而且,有框立体定向仪因框架基环的遮挡,部分手术体位和术区不易达到,给相关的颅脑手术带来极大的不便。极少数的神经外科中心,是采用手术机器人或者手术导航系统,但因其高昂的设备费用,使得绝大多数医院难以承受。
发明内容
本发明的目的就是提供一种颅脑手术定向导航系统及其使用方法,以解决现有立体定向系统由于存在术前准备繁杂和部分术区不易达到而影响手术操作及治疗效果的问题。
本发明是这样实现的:一种颅脑手术定向导航系统,包括:
基板,为平面板体;
头圈,设置在基板中部;
头部固定架,包括立柱、设置在立柱上端的伸缩连接杆以及设置在伸缩连接杆端部的颅钉卡子;
支撑杆,为伸缩杆,通过万向球头连接在所述基板上,在其上端设置有齿面连接头;
斜支杆,其一端固定在所述齿面连接头上,另一端固定在基线尺上;
基线尺,为水平设置的直尺,在其尺面上标有表示长度的正、负尺寸线,在位于正、负尺寸线中间的零位点的尺面上设置有零位激光光源,在基线尺的一端设置有端位激光光源;
双滑轨,为水平设置的两根平行导轨,其一端固定连接在所述基线尺上,并与所述基线尺在水平面上保持相互垂直;
滑动定位尺,包括横尺和竖尺,所述横尺滑动连接在所述双滑轨上,所述竖尺通过其顶端的第三滑套滑动连接在所述横尺的下方,并与所述横尺在垂面上保持相互垂直;在所述横尺上通过第一滑套滑动连接有矢位激光光源,在所述竖尺上通过第二滑套滑动连接有冠位激光光源,在所述第三滑套上设置有轴位激光光源。
在所述横尺和所述竖尺上分别标有表示长度的尺寸线,横尺上的尺寸线与所述基线尺上的尺寸线的形式一致且位置对应,竖尺上的尺寸线以与横尺的连接点为起始的零位点。
在所述双滑轨上标有表示长度的尺寸线,并以与基线尺的连接点为起始的零位点。
所述斜支杆与所述支撑杆之间的夹角为135°。
所述斜支杆通过万向连接头固定在所述基线尺的后面,且固定连接点的中心位于基线尺的零位点。
所述端位激光光源与所述双滑轨设置在所述基线尺上零位点的两侧,且所述端位激光光源在基线尺上的设置位置距离零位点大于15cm。
本发明定向导航系统没有定位框架的设置,不受手术部位及体位的限制,术野暴露好,且不会因头皮松弛活动等因素的影响而造成靶点的漂移,因此是一种性价比高、操作简单、精确度高的颅脑手术定向导航系统。本发明定向导航系统可进行脑深部手术导航、脑内血肿定向穿刺清除(包括脑干血肿清除)、深部病变活检等操作。
本发明还可这样实现:一种颅脑手术定向导航系统的使用方法,包括CT扫描基线的确定以及靶点和手术路径的确定;
所述CT扫描基线的确定方式是:在术前扫描CT时,先将患者的头部摆正,将CT扫描的定位激光束用记号笔描画于患者头部后带入手术室;再将患者的手术体位和头位调整好,患者的头部在头部固定架上予以固定,然后,转动基线尺,使基线尺上的零位激光光源和端位激光光源所打出的激光束与在患者头部描画的基线相吻合;之后,锁紧颅脑手术定向导航系统上所有的固定关节;
所述靶点和手术路径的确定方式是:根据术前扫描CT时计算出的靶点层面与基线层面间的轴位距离,将滑动定位尺沿双滑轨移动相应的距离,利用第三滑套上的轴位激光光源确定靶点轴位层面;再计算靶点层面距扫描中垂面的距离,将滑动定位尺中的横尺上的第一滑套滑动相应的距离,利用第一滑套上的矢位激光光源确定靶点矢状位层面;再计算靶点层面的冠状位深度距离,将滑动定位尺中的竖尺上的第二滑套滑动相应距离,利用第二滑套上的冠位激光光源确定靶点冠状位层面;上述确定的靶点轴位层面、靶点矢状位层面与靶点冠状位层面这三面的交点即为靶点;此时在患者的头部画出头皮预定穿刺处,即穿刺点;调整冠位激光光源和矢位激光光源的方向,使两个激光光源相交于穿刺点,此时的靶点冠状位层面与靶点矢状位层面的交线即为手术路径。
本发明还可这样实现:一种颅脑手术定向导航系统的使用方法,包括CT扫描基线的确定以及靶点和手术路径的确定。
所述CT扫描基线的确定方式是:通过计算患者的瞳孔及外耳道位置,于手术前在患者的头部描画出CT扫描基线的位置;再将患者的手术体位和头位调整好,患者的头部在头部固定架上予以固定,然后,转动基线尺,使基线尺上的零位激光光源和端位激光光源所打出的激光束与在患者头部描画的基线相吻合;之后,锁紧颅脑手术定向导航系统上所有的固定关节。
所述靶点和手术路径的确定方式是:根据术前扫描CT时计算出的靶点层面与基线层面间的轴位距离,将滑动定位尺沿双滑轨移动相应的距离,利用第三滑套上的轴位激光光源确定靶点轴位层面;再计算靶点层面距扫描中垂面的距离,将滑动定位尺中的横尺上的第一滑套滑动相应的距离,利用第一滑套上的矢位激光光源确定靶点矢状位层面;再计算靶点层面的冠状位深度距离,将滑动定位尺中的竖尺上的第二滑套滑动相应距离,利用第二滑套上的冠位激光光源确定靶点冠状位层面;上述确定的靶点轴位层面、靶点矢状位层面与靶点冠状位层面这三面的交点即为靶点;此时在患者的头部画出头皮预定穿刺处,即穿刺点;调整冠位激光光源和矢位激光光源的方向,使两个激光光源相交于穿刺点,此时的靶点冠状位层面与靶点矢状位层面的交线即为手术路径。
附图说明
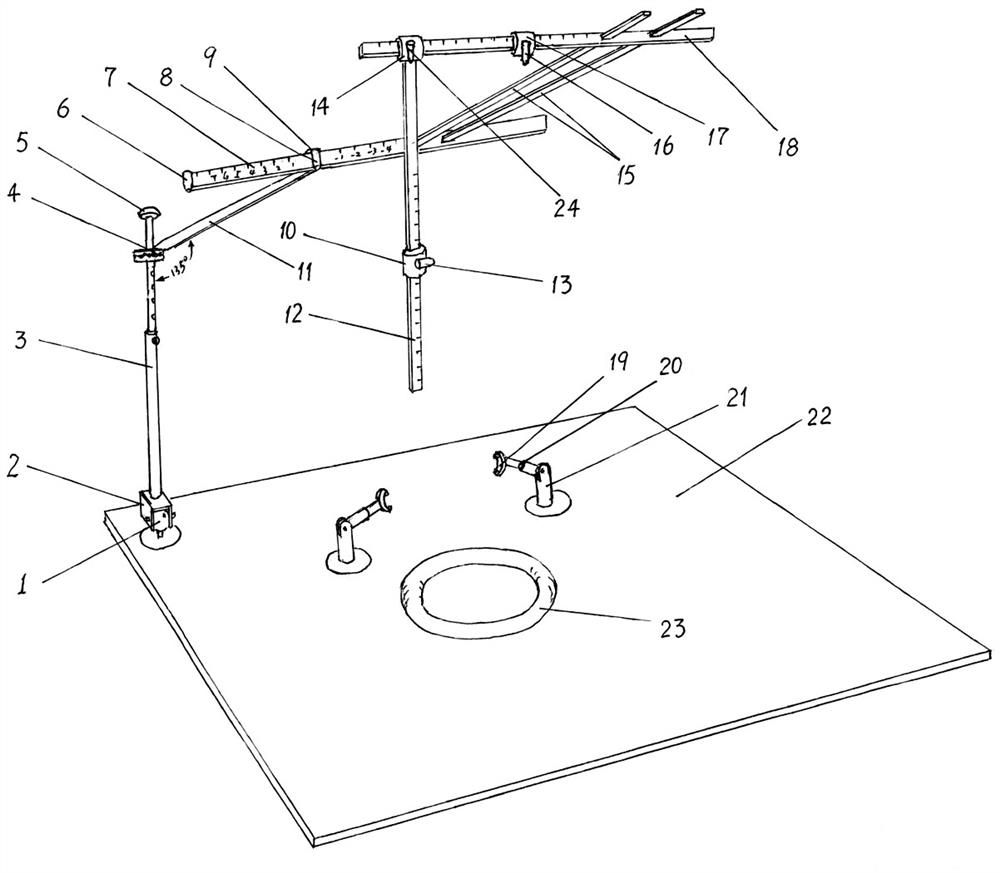
图1是本发明定向导航系统的投影结构示意图。
图中:1、万向球头,2、U形支座,3、支撑杆,4、齿面连接头,5、旋钮,6、端位激光光源,7、基线尺,8、零位激光光源,9、万向连接头,10、第二滑套,11、斜支杆,12、竖尺,13、冠位激光光源,14、第三滑套,15、双滑轨,16、矢位激光光源,17、第一滑套,18、横尺,19、颅钉卡子,20、伸缩连接杆,21、立柱,22、基板,23、头圈,24、轴位激光光源。
具体实施方式
如图1所示,基板22是一个矩形的平面板体,其大小可制成:480mm×300mm。在基板22的板面中部设置一个头圈23。头圈23是一种硅胶软垫,可分为成人型和儿童型。在接近头圈一边的基板22上设置有头部固定架。头部固定架包括立柱21、伸缩连接杆20和颅钉卡子19。颅钉卡子19也可分为成人型和儿童型。立柱21直立固定在基板22上,伸缩连接杆20轴接在立柱的上端,颅钉卡子19固定在伸缩连接杆20的端部。头部固定架左、右各一,对称设置,用以固定患者头部。头圈23和头部固定架均可采用现有已知结构制成。
图1中,在基板22的左上角的边角处设置有万向球头1,在万向球头1上接有U形支座2,在U形支座2上接有支撑杆3。支撑杆为伸缩杆,其伸缩长度可控制在350—550mm之间。在支撑杆3上通过齿面连接头4上连接一根200mm长的斜支杆11。斜支杆11与支撑杆3之间的夹角控制在135°为宜。斜支杆11可以齿面连接头4为支点,通过齿面连接头4上的旋钮5的旋转控制,在齿面连接头4为基面的水平面内旋转和固定,以方便术中的定位操作和定位后的手术,以在术中避开术野。即当需要复核靶点时,将基线尺和滑动定位尺旋转过来,进行导航操作;当复核确定后,再将基线尺和滑动定位尺旋转至不妨碍手术的地方。
斜支杆11的上端通过万向连接头9固定连接在基线尺7的后面。基线尺7为水平位设置,其上标有表示长度的正、负尺寸线,正、负尺寸线的中间位置处设为零位点,零位点的左侧为正尺寸刻度线(1~15cm),右侧为负尺寸刻度线(-1~-5cm)。万向连接头9的固定连接点的中心位于基线尺的零位点。在万向连接头9上设置有“十”字的零位激光光源8,在基线尺7的左端设置有“—”字的端位激光光源6,用于辅助确定轴位基线层面。端位激光光源6在基线尺7上的设置位置距离零位点的距离应大于15cm。
在基线尺7上的零位点的右侧设置有双滑轨15。双滑轨15是两根平行的导轨,也是呈水平位设置,并与基线尺7在水平面上保持相互垂直。双滑轨15的一端固定连接在基线尺7上,另一端为自由端。在双滑轨15的每根导轨上均标有长度尺寸线,该尺寸线以与基线尺7的连接点为零位点,尺寸线的标注长度不小于200mm。
在双滑轨15上接有滑动定位尺,滑动定位尺包括横尺18和竖尺12。在横尺18上开有套接导轨的穿接孔,与双滑轨15滑动连接,并保持在水平位上。横尺18上的尺寸线与基线尺7上的尺寸线的形式一致且位置对应。即横尺18上也标有正、负尺寸线,正、负尺寸线的中间位置处设为零位点,零位点的左侧为正尺寸刻度线(1~15cm),右侧为负尺寸刻度线(-1~-5cm)。竖尺12的顶端通过第三滑套14垂吊在横尺18的下方,通过第三滑套14与横尺18滑动连接。竖尺12与横尺18在垂面上保持相互垂直。竖尺12上的尺寸线以与横尺18的连接点为零位点,标注长度有300mm。横尺18和竖尺12两部分可拆卸,以便于存放,也便于依照手术部位更改设置方向。
在横尺18上通过第一滑套17连接有“—”字的矢位激光光源16,以确定靶点的矢位层面。在竖尺12上通过第二滑套10连接有“—”字的冠位激光光源13,以确定靶点的冠状位层面。在竖尺12顶端的第三滑套14上设置有轴位激光光源24,以确定靶点的轴位层面。通过转动调整冠位激光光源13和矢位激光光源16的方向,就可以确定手术路径。
本发明定向导航系统的使用方法包括CT扫描基线的确定以及靶点和手术路径的确定。
所述CT扫描基线的确定包括两种方式,其中第一种确定方式是:在术前扫描CT时,先将患者的头部摆正,将CT扫描的定位激光束用记号笔描画于患者头部后带入手术室;再将患者的手术体位和头位调整好,患者的头部在头部固定架上予以固定,然后,转动基线尺,使基线尺上的零位激光光源8和端位激光光源6所打出的激光束与在患者头部描画的基线相吻合;之后,锁紧本发明定向导航系统上所有的固定关节。
第二种确定方式是:通过计算患者的瞳孔及外耳道位置,于手术前在患者的头部描画出基线位置;再将患者的手术体位和头位调整好,患者的头部在头部固定架上予以固定,然后,转动基线尺7,使基线尺7上的零位激光光源8和端位激光光源6所打出的激光束与在患者头部描画的基线相吻合。最后,锁紧装置上所有的固定关节。
所述靶点和手术路径的确定方式是:根据术前扫描CT时计算出的靶点层面与基线层面间的轴位距离,将滑动定位尺沿双滑轨15移动相应的距离,利用第三滑套14上的轴位激光光源24确定靶点轴位层面;再计算靶点层面距扫描中垂面的距离,将滑动定位尺中的横尺18上的第一滑套17滑动相应的距离,利用第一滑套17上的矢位激光光源16确定靶点矢状位层面;再计算靶点层面的冠状位深度距离,将滑动定位尺中的竖尺12上的第二滑套10滑动相应距离,利用第二滑套10上的冠位激光光源13确定靶点冠状位层面。上述确定的靶点轴位层面、靶点矢状位层面与靶点冠状位层面这三面的交点即为靶点。此时在患者的头部画出头皮预定穿刺处,即穿刺点;调整冠位激光光源13和矢位激光光源16的方向,使两个激光光源相交于穿刺点,此时的靶点冠状位层面与靶点矢状位层面的交线即为手术路径。
在确定手术路径后,将靶点冠状位层面与靶点矢状位层面在患者头皮上的交线描画出来,作为术中复核使用。