一种飞行器控制方法及飞行器系统
文献发布时间:2023-06-19 19:40:14
技术领域
本申请涉及飞行器领域, 具体是一种飞行器控制方法及飞行器系统。
背景技术
现有各类飞行器使我们的交通出行越来越便捷,其中有一类单人飞行器,其主要特点是一个人使用,由人体背负,在地面的时候由人体腿部支持,借助涡轮喷气机或电机螺旋桨等驱动飞行,为了方便移动和起飞降落,出现在人体脚部设置人力轮滑或电动轮滑等脚踏移动装置,通过脚部设置的脚踏移动装置,帮助人体携带和背负飞行器移动,以及起飞和降落,具有很好的效果,但是,飞行器的起飞和降落需要人体进行控制,例如控制飞行器的动力装置的驱动力量的大小,控制飞行器的姿态控制装置用于调节飞行器的姿态等,而脚部设置的脚踏移动装置也需要人体进行一些的控制,这些飞行器相对人体来说具有很大重量,背负如此多的重量,还需要进行上下多方面的控制操作,具有很大控制难度,一旦由于不同的控制操作失误会导致严重的后果,例如如果飞行器控制加速过快,而脚下的脚踏移动装置运行太慢,人体就会在负重的情况下向前摔倒,反之,人体会向后摔倒,飞行器设有电源,螺旋桨和内燃机等,这些都会因此对飞行器使用者或周围人员生命安全造成极大的伤害,也造成财产损失,影响此类飞行器的使用和发展,需要改进。
发明内容
本申请的目的是在于提供一种飞行器控制方法及飞行器系统,能够简化脚部设有脚踏移动装置的飞行器系统的控制,使人体更容易背负飞行器行走,起飞和降落,使飞行器容易控制,并解决各部分协调问题。
本申请为实现上述目的,通过以下技术方案实现:一种飞行器控制方法,所述飞行器与人体固定连接,所述飞行器在地面依靠人体双脚支持,人体双脚设有脚踏移动装置,所述脚踏移动装置能够承载人体和飞行器在地面移动,其控制方法为,在飞行器与脚踏移动装置之间设有运行状态信息传递装置,通过所述信息传递装置使所述脚踏移动装置的控制与飞行器的控制关联。
所述的一种飞行器控制方法,所述脚踏移动装置的控制与飞行器的控制关联,所述关联方法为,飞行器根据脚踏移动装置的运行状态控制运行,例如在人体使用飞行器和脚踏移动装置在地面运行的时候,飞行器根据脚踏移动装置的运行状态空中运行,以使人体能够协调脚踏移动装置和飞行器之间的力量和姿态,减少危险;或者脚踏移动装置根据飞行器的运行状态控制运行,例如在人体使用飞行器和脚踏移动装置从空中降落的时候,脚踏移动装置根据飞行器的状态信息控制运行,以适应人体与飞行器在降落前的状态,例如在降落到地面之前脚踏移动装置开始根据飞行器的速度以相同的速度运转,在降落至地面的时候不会因为脚踏移动装置没有启动产生的阻力而使人向前摔倒。
所述的一种飞行器控制方法,所述脚踏移动装置的控制与飞行器的控制关联,所述关联为,在人体与飞行器离开地面以后,所述脚踏移动装置停止运行,取消所述飞行器的控制与脚踏移动装置的控制关联,所述飞行器由人体控制飞行,例如人体使用控制手柄控制飞行姿态和动力,现有很多类似技术在此不再叙述,飞行器离开地面的时候,切换控制可以使用开关手动切换,切断飞行器与脚踏移动装置的关联,例如在飞行器手柄设置切换开关;或在脚踏移动装置设置离地传感器,离地传感器例如压力传感器,距离传感器等,检测到脚踏移动装置离开地面自动切换,飞行器由人体控制在空中飞行,例如由单片机或集成电路根据预设程序和预设值负责切换,具体设置本领域的技术人员可以根据不同型号飞行器和脚踏移动装置的性能,功率等实际情况设置,在此不再叙述。
所述的一种飞行器控制方法,所述飞行器设有飞行动力装置和姿态控制装置,所述脚踏移动装置设有脚踏动力装置,人体与飞行器在地面的时候,脚踏移动装置的脚踏动力装置的输出功率与飞行器的飞行动力装置输出功率成正比例关联,和/或飞行器的姿态控制装置根据脚踏移动装置的运行进行姿态调节; 包括脚踏移动装置的脚踏动力装置的输出功率根据飞行器的飞行动力装置输出功率成正比例变化,和飞行器的飞行动力装置输出功率根据脚踏移动装置的脚踏动力装置的输出功率成正比例变化至少其中一种设置。
一种飞行器系统,包括飞行器本体和脚踏移动装置,所述飞行器本体与人体固定连接,所述飞行器本体在地面依靠人体双脚支持,人体双脚设有脚踏移动装置,其特征在于:所述脚踏移动装置和飞行器本体之间还设有信息传递装置,所述信息传递装置设有检测装置,所述检测装置用于检测脚踏移动装置的运行状态,或/和飞行器本体的运行状态,并在飞行器本体和脚踏移动装置之间传输数据,用于脚踏移动装置和飞行器本体的控制。
一种飞行器系统,所述飞行器本体设有飞行动力装置,姿态控制装置,飞行器电源和飞行控制器,所述飞行控制器依靠飞行器电源提供电力,控制飞行动力装置和姿态控制装置运行,飞行控制器通过有线或无线方式连接所述检测装置,并根据检测装置的输出数据控制飞行动力装置的功率输出,和/或控制姿态控制装置。
飞行动力装置可以是电机驱动螺旋桨,涡轮喷气发动机等相关装置,姿态控制装置可以是飞行器的主翼,副翼,尾舵和舵机等相关装置,检测装置至少包括速度检测装置和功率检测装置其中一个,各部分可以互相组合使用。
所述飞行器本体通过其固定部固定在人体背部,固定部在所述飞行器本体和人体之间设有减震缓冲装置,所述飞行器本体设有腿部支架,所述腿部支架从飞行器本体的固定部与人体固定的部分向下延伸,所述腿部支架下端与人体脚部连接或与脚踏移动装置连接,所述腿部支架具有弹性,所述腿部支架与人体腿部连接为,所述腿部支架在受到沿着人体脚部和飞行器本体之间的压力之前具有沿着人体腿部弯曲方向的趋势,可以在受到沿着人体脚部和飞行器本体之间的压力的时候向人体腿部弯曲的方向弯曲;所述腿部支架下端与人体脚部连接或与脚踏移动装置连接,连接的位置可以在人体脚部的前,后或侧面,可以固定连接,利用腿部支架的弹性,或者,在连接的位置设置活动关节,例如轴套,鱼眼关节轴承,万向关节或球头关节等,实现与脚踏移动装置的活动弯曲连接,从而在脚踏移动装置运行的时候不受到腿部支架的限制;腿部支架在人体使用飞行器组合的时候,具有多方面支撑作用,当人体与飞行器组合竖直站立的时候,腿部支架把人体和飞行器本体的重量传递给脚踏移动装置,减轻人体负担,当人体与飞行器组合水平飞行的时候,腿部支架利用其本身的弹性支撑人体腿部,防止人体腿部因为重量向下弯曲,减轻人体腿部负担,在腿部支架设有水平尾翼和/或垂直尾翼,在人体左右腿的腿部支架的水平尾翼和/或垂直尾翼分别设置,人体腿部的运动带动所述水平尾翼和垂直尾翼变化姿态。
所述飞行器本体还向上设有头部支架,所述头部支架直接或间接与人体头部连接,所述头部支架具有弹性,或/和所述支架与头部连接位置为活动连接,使头部能够摆动和转动;设置头部支架不仅可以依靠头盔等保护头部,头部支架因为连接在飞行器本体与头盔或头部之间,对头部同时具有支撑力,所述支撑力包括从飞行器本体到头部方向的轴向和径向的支撑力,在人体与飞行器本体竖直方向站立或飞行的时候,人体头部与头盔固定,头部支架的轴向支撑力减轻人体头部负担,在人体与飞行器本体水平飞行的时候,径向支撑力减轻人体头部对人体颈部的负担,在人体与飞行器本体倾斜运行的时候,轴向和径向的支撑力都发挥减轻人体负担的作用,避免人体颈部受到过大载荷,有利于人体对飞行器本体的控制。
所述脚踏移动装置为人力轮滑鞋,所述人力轮滑鞋依靠人力蹬踏运行,所述人力轮滑鞋分别固定在人体左右脚下,在左右脚下的所述人力轮滑鞋可以交替运行前进,所述人力轮滑鞋设有滑轮和速度传感器,所述速度传感器检测滑轮的运转速度和/或加速度,所述速度传感器通过线缆,或飞行器本体与人力轮滑鞋之间的无线收发装置连接飞行控制器,传输人力轮滑鞋的速度信息给飞行控制器;当人体带动左右脚的人力轮滑鞋离开地面的时候,所述人力轮滑鞋失去动力,滑轮停止转动,所述速度传感器检测到速度小于设定值或为零,传递信息给飞行器本体的飞行控制器,切换飞行器本体的控制,所述速度传感器和线缆或无线收发装置组成信息传递装置,所述速度传感器作为检测装置同时具有检测人力轮滑鞋运行状态和离地检测两个作用,或所述速度传感器检测人力轮滑鞋相对于地面的速度,通过线缆,或飞行器本体与人力轮滑鞋之间的无线收发装置连接飞行控制器,传输人力轮滑鞋的速度信息给飞行控制器,当人力轮滑鞋离开地面的时候,所述速度传感器检测速度值小于设定值或为零,传递信息给飞行器本体的飞行控制器,切换飞行器本体的控制;所述速度传感器有多种,如何实现速度的检测,现有技术人员可以根据实际进行设置,在此不再叙述,无线收发装置对于信息的传递也是现有技术可以实现的技术,在此不再叙述,所述滑轮也可以用履带代替,或滑轮与履带两者组合使用。
所述脚踏移动装置为电动轮滑鞋,所述电动轮滑鞋设有电动轮滑轮,轮滑控制器和轮滑电源,所述电动轮滑鞋分别固定在人体左右脚下,在左右脚下的所述电动轮滑鞋可以交替运行前进,所述电动轮滑轮为轮式或履带式,轮滑控制器依靠轮滑电源提供电力控制电动轮滑轮运转,在所述电动轮滑鞋还设有第一离地传感器和第一人体姿态传感器,所述第一离地传感器和第一人体姿态传感器与轮滑控制器连接,第一离地传感器用于检测所述电动轮滑鞋为离地状态或接地状态,第一人体姿态传感器用于检测人体前倾或后仰的姿态,轮滑控制器根据第一离地传感器信息控制电动轮滑轮在双脚接地的时候运转,在单脚接地的时候控制离地的和接地的电动轮滑轮以相同速度运转,在双脚离地的时候控制电动轮滑轮停止运转,轮滑控制器根据第一人体姿态传感器的信息控制电动轮滑鞋在人体前倾的时候加速运转,在人体后仰的时候减速运转或向后运转,所述第一离地传感器,第一人体姿态传感器和轮滑控制器至少其中一个与飞行控制器连接,传输所述电动轮滑鞋信号给飞行控制器;所述轮滑电源独立给轮滑控制器供应电力,或与飞行器本体共享电源。
所述脚踏移动装置为电动平衡车,所述电动平衡车分别设置在人体左右脚下,在左右脚下的所述电动平衡车可以交替运行前进,所述电动平衡车还设置有电动平衡轮,平衡控制器和平衡车电源,平衡控制器依靠平衡车电源提供电力,控制电动平衡轮运转和电动平衡车的平衡,在所述电动平衡车内设有第二离地传感器和第二人体姿态传感器,第二离地传感器和第二人体姿态传感器与平衡控制器连接,第二离地传感器用于检测所述电动平衡车为离地状态或接地状态,第二人体姿态传感器用于检测人体前倾或后仰的姿态,平衡控制器根据第二离地传感器信息控制电动平衡轮在双脚接地的时候运转,在单脚接地的时候控制离地的和接地的电动平衡轮以相同速度运转,在双脚离地的时候控制电动平衡轮停止运转,平衡控制器根据第二人体姿态传感器的信息控制电动平衡车在人体前倾的时候加速运转,在人体后仰的时候减速或向后运转,以保持人体平衡,所述第二离地传感器,第二人体姿态传感器和平衡控制器至少其中一个与飞行控制器连接,传输所述电动平衡车信号给飞行控制器,所述平衡车电源独立给平衡控制器供应电力,或与飞行器本体共享电源,当使用电动平衡车的时候,电动平衡轮设置在电动平衡车的前后方向的中间位置,所述电动平衡轮为独轮或沿着电动平衡车前进后退方向的横向设置的多轮,有利于平衡,所述腿部支架下端连接在电动平衡车侧面前后方向的中间位置。
根据上述的飞行器控制方法和飞行器系统,当例如所述的人力轮滑鞋,电动轮滑鞋和电动平衡车等脚踏移动装置在地面加速运行,飞行器本体也加速运行,增加动力输出和姿态调整以达到与脚踏移动装置的加速配合,当脚踏移动装置减速运行,飞行器本体也减速运行,减少动力输出和姿态调整,以达到与脚踏移动装置减速配合,当脚踏移动装置向后运行,飞行器本体也向后运行,反向动力输出和姿态调整,例如反向旋转螺旋桨等,当脚踏移动装置离开地面的时候,飞行控制器根据人体控制飞行,对于飞行器本体的操控的现有技术在此不再叙述,本领域的技术人员可以理解并根据不同飞行器本体的具体结构和原理设置实施。
实际上从物理电学知识知道,功率可以由电压和电流的乘积计算得出,在电压不变的情况下,功率的大小与电流的大小是正比例关系,因此所述功率检测信息可以通过检测电流获得。
本申请的有益效果在于:采用本申请所述的一种飞行器控制方法及装置,在飞行器和脚踏移动装置之间设置关联的方法和装置,能够在人体使用本申请所述的飞行器系统的时候,使所述飞行器系统的飞行器本体部分和脚踏移动装置部分互相协调一致运行,防止所述飞行器系统在地面运行期间,因为飞行器系统的飞行器本体部分和脚踏移动装置部分运行不协调一致导致的人体伤害,财产损失,同时提高飞行器系统的运行效率,本申请的飞行器系统还采用具有减震缓冲功能的人体固定装置和所述腿部支架,减轻人体负担,采用头部支架,减轻人体头部负担, 所述的腿部支架和头部支架不仅在人体使用飞行器系统在地面运行期间具有作用,在人体使用飞行器系统在空中飞行的时候,同样能够减轻人体的负担,人体保持与飞行相适应的姿势而不用太多力量和疲劳,采用本申请的电动轮滑鞋和电动独轮平衡车,可以控制人体脚部离地和接地期间协调运动,通过本申请所述的这些设置,使本申请所述飞行器系统更加适合人体使用,减少危险,更稳定,人体用脚部控制脚踏移动装置运行,脚踏移动装置与飞行器本体控制关联,因此在整个本申请所述的飞行器系统运行的时候,人体不用单独控制飞行器本体,而是只需要用人体脚部控制脚踏移动装置即可,达到同步控制飞行器的目的,实现了整个装置的统一,极大地简化了控制过程,能够适应人体与飞行器的反复灵活安全地起飞降落。
附图说明
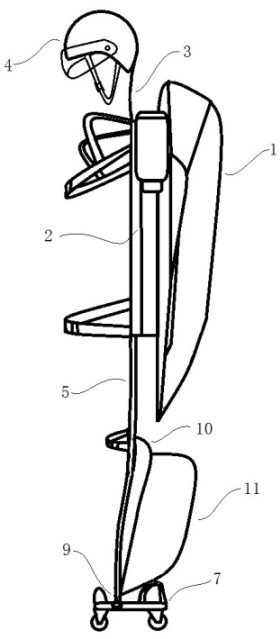
图1为本申请含有人力轮滑鞋或电动轮滑鞋的一种飞行器系统侧面结构示意图;
图2为本申请含有人力轮滑鞋或电动轮滑鞋的一种飞行器系统的人体使用正面示意图;
图3为本申请的含有电动平衡车的一种飞行器系统侧面结构示意图;
图4为本申请的电动平衡车与腿部支架连接侧面示意图;
图5为本申请的头部支架与头盔一种连接侧面示意图;
图6为本申请的人力轮滑鞋或电动轮滑鞋与腿部支架连接侧面示意图;
图7为本申请的腿部支架连接端一种连接结构示意图;
图8为本申请的水平尾翼和垂直尾翼与腿部支架连接结构示意图;
图9为本申请的腿部支架连接端另一种连接结构示意图;
图10为本申请的腿部支架连接端另一种连接结构局部示意图;
图中:1-飞行器本体,2-固定部,3-头部支架,31-头部支架内孔,32-头部支架外孔,33-头部支架档帽,34-档帽底片,35-档帽弹簧,4-头盔,41-头盔第一连接端,42-头盔第二连接端,5-腿部支架, 6-线型霍尔器件61-第二转轴,62-销针,63-永磁体,64-第二轴套,7-人力轮滑鞋或电动轮滑鞋,71-速度传感器,8-电动平衡车,81-电动平衡轮,9-腿部支架连接端,91-内孔,92-垫圈,93-第一轴套,94-销孔,95-第一转轴,96-通孔,97-信号线,98-底座,99-旋钮,10-水平尾翼,11-垂直尾翼,12-脚部固定带。
具体实施方式
下面结合具体实施例,进一步阐述本申请,图1为本申请含有人力轮滑鞋或电动轮滑鞋的一种飞行器系统侧面结构示意图;结合附图2看出,图中飞行器本体1通过其固定部2与人体背部连接,固定部2通过胸部,腰部固定带人体,支架5通过腿部固定带固定人体,脚部固定带固定人体脚部于脚踏移动装置,即人力轮滑鞋或电动轮滑鞋7,固定部2在飞行器本体1和人体之间设有阻尼减震系统,使人体与飞行器本体1之间能够在一定距离范围内相互移动,在人体使用飞行器本体1运动的时候能够减少飞行器本体1对于人体的冲击,例如在人体在地面运动的时候,减少上下震动对于人体的影响,可以减少飞行器本体对人体的冲击力,使人体背负所述飞行器本体轻松,减少体能消耗,移动速度更快,具体阻尼减震系统有很多类设计,本领域技术人员根据现有技术能够实现,在此不再叙述,例如在申请号CN2021212657645(发明名称为一种背负式飞行器)中叙述的装置;飞行器本体1向上设置头部支架3,头部支架3至少具有轴向和径向弹性其中一种,例如采用弹性钢材或碳纤维等复合材料制作,能够在上下的轴向或左右的径向中至少一个方向弯曲,头部支架3下端飞行器本体1固定连接,头部支架3上端可以与人体头部直接或间接活动连接,直接连接例如直接用绑带固定于头部,间接连接例如本实施例头部支架3上端活动连接头盔4,飞行器本体1向下设置腿部支架5,腿部支架下端连接人力轮滑鞋或电动轮滑鞋7。
当使用人力轮滑鞋的时候,所述人力轮滑鞋依靠人力蹬踏运行,例如人体两个脚部带动人力轮滑鞋依照外八字的形状轮流蹬踏地面,所述人力轮滑鞋分别固定在人体左右脚下,在左右脚下的所述人力轮滑鞋可以交替运行前进,所述人力轮滑鞋设有滑轮和速度传感器,所述速度传感器检测滑轮的运转速度和/或加速度,所述速度传感器以有线或无线电连接飞行器本体1的飞行控制器,传输人力轮滑鞋的速度信息给飞行控制器,所述滑轮也可以用履带代替,或滑轮与履带两者组合使用,所述速度传感器在现有技术中有很多应用,各类汽车飞行器等交通工具,以及工业机床,农业设备等都有广泛使用,例如附图6中的速度传感器71,设置在滑轮附近进行转速检测,陀螺仪固定于人力轮滑鞋进行加速度检测等是现有技术,本领域技术人员可以根据本申请的内容根据实际情况设置实施,在此不再叙述。
当使用电动轮滑鞋的时候,所述电动轮滑鞋设有电动轮滑轮,轮滑控制器和轮滑电源,所述电动轮滑鞋分别固定在人体左右脚下,在左右脚下的所述电动轮滑鞋可以交替运行前进,所述电动轮滑轮为轮式或履带式,轮滑控制器依靠轮滑电源提供电力控制电动轮滑轮运转,在所述电动轮滑鞋内还设有第一离地传感器和第一人体姿态传感器,所述第一离地传感器和第一人体姿态传感器与轮滑控制器连接,第一离地传感器用于检测所述电动轮滑鞋为离地状态或接地状态,第一人体姿态传感器用于检测人体前倾或后仰的姿态,轮滑控制器根据第一离地传感器信息控制电动轮滑轮在双脚接地的时候运转,在单脚接地的时候控制离地的和接地的电动轮滑轮以相同速度运转,在双脚离地的时候控制电动轮滑轮停止运转,轮滑控制器根据第一人体姿态传感器的信息控制电动轮滑鞋在人体前倾的时候加速运转,在人体后仰的时候减速运转或向后运转,所述第一离地传感器,第一人体姿态传感器和轮滑控制器至少其中一个与飞行器本体1的飞行控制器连接,传输所述电动轮滑鞋信号给飞行控制器;所述轮滑电源独立给轮滑控制器供应电力,或与飞行器系统其他部分共享电源,第一离地传感器和第一人体姿态传感器采用的传感器为现有技术,例如使用压力传感器检测人体脚部与电动轮滑鞋之间的压力或检测电动轮滑鞋与地面之间的压力,当检测到的压力值小于设定值即为离开地面,可以采用固定于电动轮滑鞋的超声波发射接收装置向地面发射超声波,当检测到返回超声波的值小于设定值的时候即为离开地面;姿态传感器例如采用陀螺仪检测人体姿态,把陀螺仪设置在腿部支架5上或人体上,当人体或腿部支架5发生前倾或后仰,陀螺仪一起发生前倾或后仰,输出人体姿态信号。
例如腿部支架连接端9可以采用设置角度传感器,角度传感器使用电位器,把电位器的底座98和旋钮99设置在腿部支架下端和电动轮滑鞋7之间,当两者之间发生的转动电位器输出不同阻值的信号,对应不同的角度信息,输出前倾或后仰的人体姿态信号,其中一个实施例是参见附图4,附图6和附图7,为了腿部支架连接端9能够不影响腿部支架5和人力轮滑鞋或电动轮滑鞋之间的相互活动,把腿部支架连接端9设置在人力轮滑鞋,电动轮滑鞋或电动平衡车和人体的侧面,其结构为,在人力轮滑鞋或电动轮滑鞋和人体的侧面设置内孔91,所述内孔91有内螺纹,第一转轴95左端设置外螺纹与内孔的螺纹配合,第一转轴95左端依次穿过第一轴套93和垫圈92拧紧于内孔91,内,可以理解的是转轴95也可以采用焊接的方式固定于内孔91,第一转轴95内部通孔96,第一转轴95右端通孔96内设置电位器,电位器具有信号线97,底座98和旋钮99,信号线97穿过第一转轴95进入在人力轮滑鞋或电动轮滑鞋和人体的内部,底座98卡设在第一转轴95内部,旋钮的上端有销柱,在底座98卡设入第一转轴95内部的时候,旋钮99的上端插入第一轴套93上端连接的腿部支架5上设置的销孔94,当人体发生前倾或后仰的时候,腿部支架5摆动,第一轴套93因为腿部支架5摆动而围绕第一转轴95转动,带动销孔94内的销柱和旋钮99转动,旋钮99转动使底座98内部的阻值变化,通过信号线97传递,传递信号到带动轮滑鞋的轮滑控制器,或/和飞行控制器,本结构的腿部支架连接端9可以用于本申请的各种脚踏移动装置。
附图4是本申请的电动平衡车与腿部支架连接侧面示意图,图中腿部支架5通过腿部支架连接端9与电动平衡车8连接,电动平衡车8设置一个电动平衡轮81,其他电动平衡车的结构为现有技术,在此不再显示和叙述。
附图6为本申请的人力轮滑鞋或电动轮滑鞋与腿部支架连接侧面示意图,图中腿部支架5通过腿部支架连接端9与人力轮滑鞋或电动轮滑鞋7连接,当使用人力轮滑鞋的时候设置速度传感器71在滑轮或电动滑轮侧面,检测人力轮滑鞋或电动轮滑鞋7的运行速度,或使用电动轮滑鞋,利用电动轮滑鞋的电动轮滑轮的速度,传递信号到电动轮滑鞋的轮滑控制器,或飞行控制器,其他除了本申请叙述的人力轮滑鞋或电动轮滑鞋7的结构形状为现有技术,在此不再显示和叙述。
图2为本申请含有人力轮滑鞋或电动轮滑鞋的一种飞行器系统的人体使用正面示意图;结合附图1可以看出水平尾翼10和垂直尾翼11设置在腿部支架5上并且靠近下端位置,腿部支架固定于人体腿部,人体腿部的运动因此可以带动水平尾翼10和垂直尾翼11移动,改变水平尾翼10和垂直尾翼11的方向姿态。
图3为本申请的含有电动平衡车的一种飞行器系统侧面结构示意图;在本附图中各部分与附图1的区别在于采用电动平衡车8作为脚踏移动装置,电动平衡车8在现有技术中已经广泛使用,是娱乐代步的工具,其具体结构在此不再叙述,本领域的技术人员可以理解实施。
附图8为本申请的水平尾翼和垂直尾翼与腿部支架连接结构示意图;在本附图中腿部支架5靠近腿部支架连接端9的位置设置水平尾翼10 和垂直尾翼11,腿部支架连接端9设置在人体腿部外侧,并且连接脚踏移动装置,垂直尾翼11朝向人体脚部后侧,水平尾翼10朝向人体外侧,脚部固定带12用于固定人体脚部后部。
图9为本申请的腿部支架连接端另一种连接结构示意图;图10为本申请的腿部支架连接端另一种连接结构局部示意图;本附图显示的是另一种结构的腿部支架连接端9,可以采用磁电式的传感器,例如使用线型霍尔传感器,包括设置在脚踏移动工具侧面的线型霍尔器件6,固定于脚踏移动装置侧面的第二转轴61,连接于腿部支架5下端的第二轴套64,垫圈92,销针62和设置在第二轴套64靠近脚踏移动工具一端的永磁体63,永磁体63沿着第二轴套64转动方向具有不同大小的磁性,转轴61穿过第二轴套64和垫圈92,销针62穿过第二转轴61上的销孔限定第二轴套64的位置,第二轴套64因为腿部支架5移动而转动,线型霍尔器件6与第二轴套64上设置的永磁体63位置对应,线型霍尔器件6因为不同磁力而输出电信号,线型霍尔器件6与电动轮滑鞋的轮滑控制器或/和飞行控制器连接,传递信号到电动轮滑鞋的轮滑控制器,或/和飞行控制器,本结构的腿部支架连接端9可以用于本申请的各种脚踏移动装置。
结合附图1,附图2和附图3实施例,其中的飞行器本体1设置左右双涡轮喷气发动机,可以理解的是,还可以采用多种类型的发动机或电动机作为动力驱动,也可以采用更多数量的发动机,在腿部支架下端相对于人体的两侧连接设置水平尾翼10,在腿部支架下端相对于人体的后侧连接设置垂直尾翼11,人体运动腿部可以带动水平尾翼10 和垂直尾翼11移动,改变飞行器本体的风动属性,改变飞行器本体的运动方向,在两个腿部支架下端都设置垂直尾翼,增加人体对于飞行器本体调节姿态能力,本领域的技术人员通过附图1和附图2可以了解本申请的基本原理和结构,相关飞行器的结构和飞行原理在此不再叙述,例如,在人体手部上设置绑定控制手柄,用于人体对于飞行器本体的控制,或者在飞行器本体上设置控制手柄,人体利用手部去拉动,转动或按压手柄,控制飞行器本体飞行,现有飞行器技术中已经有相关内容,在本申请的附图不再显示和叙述具体结构,本领域的技术人员可以根据本申请理解并实施。
图5为本申请的头部支架与头盔一种连接侧面示意图;所述飞行器本体1还向上设有头部支架3,所述头部支架3直接或间接与人体头部连接,所述头部支架3具有弹性,或/和所述头部支架3与头部连接位置为活动连接,使头部能够摆动和转动;附图5中头盔4的后部设置头盔第一连接端41,在头部支架3的上端设置头盔第二连接端42,头盔第一连接端41和头盔第二连接端42位互相配合使用的活动连接装置,例如本附图中显示的球头和球套,使头盔4能够多个方向转动,也可以使用其他类型的万向节等具有同样功能的活动连接装置,头部支架3的下端为中空管状,侧面设置头部支架内孔31,在飞行器本体1的固定部2上端设置带有头部支架外孔32的管状结构,在头部支架内孔31内设置定位装置,所述定位装置包括头部支架档帽33通过档帽弹簧35连接档帽底片34,头部支架档帽33依靠档帽弹簧35穿过头部支架内孔31和头部支架外孔32,定位头部支架3的高度,按压头部支架档帽33上下调节头部支架3的高度,适应人体头部和颈部不同的高度需要,设置头部支架3不仅可以依靠头盔4等保护头部,头部支架3因为连接在飞行器本体1与头盔4或头部之间,对头部同时具有支撑力,所述支撑力包括从飞行器本体1到头部方向的轴向和径向的支撑力,在人体与飞行器本体1竖直方向站立或飞行的时候,人体头部与头盔4固定,头部支架3的轴向向上的支撑力减轻人体头部负担,在人体与飞行器本体1水平飞行的时候,头部支架3的径向支撑力负担部分人体头部的重量而减轻人体头部对人体颈部的负担,在人体与飞行器本体1倾斜运行的时候,轴向和径向的支撑力都发挥减轻人体负担的作用,避免人体颈部受到过大载荷,有利于人体对飞行器本体1的控制和长时间飞行。
可以理解的是,本申请所述实施例里面各部件的尺寸比例并非完全按照实际比例绘制,相关内容本领域技术人员可以理解实施,不限制本申请的技术方案。
本申请的实施例的飞行器本体附图的形状用于说明本申请的使用, 这里仅通过所选的实施例对本申请进行了说明,所述背负式飞行器还有很多种形状,不仅仅是附图中的形状,飞行器还可以设有电子控制系统,机翼可以设有付翼襟翼等,机翼可以是一体机翼,或机翼设置在机体两侧,都适用于本申请,因此显而易见的是,上述的实施例用于说明而不是用于限定本申请。