用于电动马达的发夹线系统
文献发布时间:2023-06-29 06:30:04
技术领域
本说明书总体上涉及用于电动马达的系统,电动马达包括具有不同宽度的发夹线(或发夹式导线)。
背景技术
在汽车应用中,电动马达用于多种用途,比如作为启动马达、电驱动辅助器(推进器)以及纯电驱动,发电机为车载电力负载提供电力并且为电池组充电,以及作为再生器用作在车辆的制动/减速期间将车辆的动能转化为电力用以为电池组充电。
电动马达可包括定子和转子,其中转子联接到一个或多个输出轴。定子可以是静止的,并且可由电压源(诸如电池)供电,以在包括在定子的芯部(本文称为定子芯部)内的多根导线中产生电流,电流随后可产生磁场。在一个示例中,由定子产生的磁场可以在转子内感应电流,使转子响应定子和转子的组合磁场而旋转。在另一个示例中,转子可以包含永磁体,永磁体可以使转子响应于由定子产生的磁场而旋转。随后,转子的旋转运动可以转化为与电动马达的转子联接的一个或多个输出轴的旋转。
多根导线可以插入定子芯部内的槽(本文称为定子槽)中。定子槽可构造成切口,其径向延伸穿过定子芯部的部分厚度,并且完全延伸穿过定子芯部的长度。定子槽可沿定子芯部的周缘均匀间隔布置,并且成对相邻的定子槽可由定子齿隔开。定子内产生的磁场可以根据定子槽的形状和尺寸,以及其中包含的导线的形状和尺寸来调整,并且多根导线的电阻(和相应的铜损耗)可以变化。
在一个示例中,定子芯部的每个槽可以是梯形形状,每个定子槽包括插入到定子槽中的多根圆形导线,所述多根圆形导线以一定的填充系数填充槽。另外,相邻梯形定子槽的相邻侧翼可以彼此平行,或者换言之,相邻定子槽之间的每个定子齿可以是矩形的,并且因此可以包括沿径向方向平行的侧翼。通过包括具有平行侧翼的定子齿,可以沿定子齿径向地保持恒定的磁通密度,从而导致电动马达效率的提高。
在另一示例中,定子芯部的每个槽可以是矩形形状,并且可以包括插入到定子槽中的发夹导线的腿部,发夹导线的腿部具有矩形横截面。与其中插入有圆形导线的梯形定子槽相比,通过使用其中插入有发夹线的矩形定子槽,这些定子槽可以获得更高的定子槽填充系数。
但是,上述每个示例都可能具有潜在问题。虽然包括其中插入有圆形导线的梯形槽的示例可允许在定子齿内产生恒定的磁通密度,但定子槽内圆形导线的填充系数低于矩形定子槽内矩形发夹线的填充系数,从而导致电动马达的功率密度降低。此外,将圆形导线插到定子槽可能难以自动化,并且圆形导线的几何形状可能导致较大的DC(直流)电阻。相反,虽然矩形定子槽中的矩形发夹线的示例可能包括更有利的填充系数、降低的DC电阻,并且与之前的示例相比可以允许更容易地将导线插入定子芯部中,但相邻定子槽之间的定子齿可以包括沿定子芯部径向发散的侧翼(例如,定子齿可为梯形形状),导致径向方向上的磁通密度减小。此外,与梯形槽相比,矩形定子槽可能具有减小的面积,导致更高的铜损,并因此降低电动马达效率。此外,与圆形导线相比,矩形发夹导线的横截面积更大,可能会由于邻近效应而导致AC(交流)铜损耗增加。
已经尝试修改矩形槽中发夹线的设计。Jeong Dae-sung在K.R.1020120131309A中给出了一种示例方法。其中,Dae-sung提出包括矩形导电发夹线,其中发夹线的腿部在其中包括多个导电层,每个导电层由绝缘层隔开。以这种方式,与例如矩形定子槽内的传统矩形发夹线相比,AC铜损耗可以减少,而与例如梯形定子槽内的多根细圆线相比,可以保持增加的填充系数,从而提高电动马达功率和效率。
然而,本文的发明人已经认识到此类系统的潜在问题。作为一个示例,K.R.1020120131309A的系统具有梯形定子齿(例如,定子齿的侧翼随着径向距离的增加而彼此散开),导致定子齿内的磁通密度径向减小。此外,通过使用矩形定子槽,与梯形定子槽相比定子槽面积减小。
发明内容
在一个示例中,上述问题可以通过一种用于电动马达的定子组件的系统来解决,该系统包括围绕定子的内圆柱形表面定位的多个分段式槽,以及堆叠在每个分段式槽内的不同宽度的多根发夹线。以这种方式,通过包括近似于梯形定子槽的具有不同宽度的发夹线,可以在定子齿内维持近似恒定的磁通密度,同时维持低DC电阻和大填充系数。
作为一个示例,定子的定子槽可以包括四个连续的矩形层,每个后续的层的宽度在径向方向上增加。相应地,每个定子槽可以包括在定子槽的第一层中的具有第一宽度的第一对发夹线腿部,在定子槽的第二层中径向堆叠超过第一对的第二对发夹线腿部,其具有更大的第二宽度,第三对发夹线腿在定子槽的第三层中径向堆叠超过第二对的第三对发夹线腿部,其具有更大的第三宽度,以及在定子槽的第四层中径向堆叠超过第三对的第四对发夹线腿部,其具有更大的第四宽度。
以这种方式,通过在每个定子槽中使用成对的发夹线腿部,这些成对的发夹线腿部各自具有不同的宽度,电动马达可以获得与矩形槽中的矩形发夹腿部相同的填充系数,但与矩形定子槽相比,可以具有增加的槽面积。具有在径向方向上增加宽度的多层发夹线腿部的技术效果是:可以维持定子齿内的磁通密度基本恒定,这是由于定子齿的侧翼是基本平行的。此外,与具有相同填充系数的矩形槽设计和包括圆线的梯形槽设计中的每一个相比,包括宽度沿径向方向增加的槽的定子设计可以具有减小的DC电阻。与之前的定子槽设计相比,通过降低DC电阻,可以提高电动马达效率。
应当理解,提供以上发明内容是为了以简化的形式介绍在详细描述中进一步描述的概念的选择。这并不意味着识别所要求保护的主题的关键或必要特征,所要求保护的主题的范围由详细描述之后的权利要求书唯一地限定。此外,所要求保护的主题不限于解决以上或在本公开的任何部分中指出的任何缺点的实施方式。
附图说明
图1示出了电动马达的第一端视图。
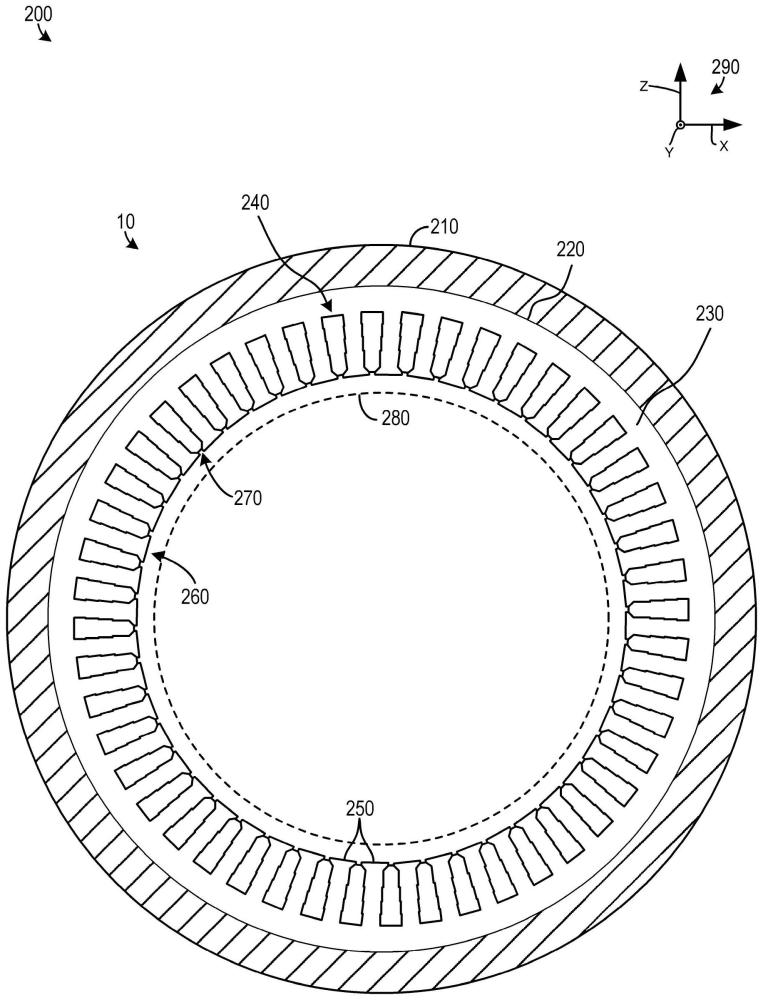
图2示出电动马达的第二端视图,包含包括在定子壳体中的槽的细节。
图3A示出了具有第一宽度的发夹线的第一实施例。
图3B示出了具有第二宽度的发夹线的第二实施例。
图3C示出了具有第三宽度的发夹线的第三实施例。
图3D示出了具有第四宽度的发夹线的第四实施例。
图4A示出定子槽的第一实施例,其中包括四对发夹线。
图4B示出了具有四段不同宽度的部段的定子槽的第二实施例,其中包括四对不同宽度的发夹线。
图2-4B大致按比例示出。
具体实施方式
以下描述涉及用于在单个定子槽内包括多层不同宽度的发夹线的系统。定子槽可以形成在电动马达的定子内;图1中给出了电动马达的实施例。在图2中给出了包括定子槽的细节的图1的电动马达的相应端视图。图2的定子槽包括四个连续的矩形层,矩形层的宽度在径向方向上增加。相应地,定子槽内的层可以填充有导电发夹线的成对腿部,发夹线的腿部的宽度对应于层的宽度。图3A-3D示出了具有不同发夹腿部宽度的四种不同发夹线设计的平面图。如图4A示出了第一填充的矩形定子槽,其包括八个相等面积和相等纵横比(该对象在一个方向上的第一范围与该对象在垂直方向上的第二范围的比率,例如,槽的层的宽度与在径向方向上的层的高度的比率)的发夹腿部,而图4B示出了具有四对发夹腿部的第二填充的定子槽,其中每对发夹腿部具有相等的横截面积,但具有不同的宽度。
图1示出电动马达10的第一端视图100。电动马达10包括封围内部部件的壳体102。包括第一端部绕组106的定子104可以经由壳体102封围。端部绕组106可以包括多根卷绕线或发夹线(例如,圆线、矩形线、扁平线等),它们在定子104的芯部的外部。卷绕线或发夹线可以经由相位汇流条113连接到输入电压源,其中至容纳在端部绕组106中的发夹线的联接件由箭头126表示。然而,可以理解,定子芯部还包括延伸穿过其中的线材部段。此外,定子104可以从能量储存装置108(例如,电池、电容器等)接收电能,并且在一些情况下,比如当马达设计成具有再生功能时,将电能传递到能量储存装置108。箭头110表示该能量传递。电动马达还包括转子112,其具有围绕旋转轴线118旋转的芯部114和转子轴116。可以理解,径向方向是垂直于旋转轴线118的任何方向。此外,还提供了包括x轴、y轴和z轴的坐标系190以供参考。在一个示例中,z轴可以是竖直轴线,x轴可以是横向轴线,和/或y轴可以是纵向轴线。然而,在其他示例中,这些轴线可以具有其他定向。可以理解,电动马达可以设计成产生在第一旋转方向上的旋转输出和在某些示例中的在第二旋转方向上的旋转输出。此外,在一些示例中,电动马达可以设计成能以再生模式操作,在再生模式中电动马达接收旋转输入并且响应于接收的旋转输入产生电能。
转子芯部114可以包括多个金属叠片115(例如,叠片磁性钢或铁)或者实心磁性金属。因此,转子芯部114包括磁交互部分(例如,永磁体或电磁体)。可以理解,在马达操作期间,转子112可以旋转,同时定子104保持相对静止。
定子104和转子112构造成电交互作用以产生旋转输出,并且在一些情况下,在一个用例中,响应于从诸如车辆传动系的外部源接收的旋转输入而产生电能。然而,如上所述,马达可以在广泛的各种操作环境中使用。因此,电动马达10构造成产生旋转输出,并且在一些示例中,在再生模式下,接收旋转输入并且产生电能输出。因此,电动马达10可以设计成从能量储存装置108接收电能,并且在一些示例中,将能量传递到能量储存装置。有线和/或无线的能量传递机构可以用于促进这种能量传递功能。
第一平衡板120示出为附连到转子芯部114。平衡板120可以设计为考虑转子112中的不平衡。详细地说,可以选择第一平衡板120和第二平衡板的质量和质量分布来平衡马达中的残留不平衡力。换言之,在一个示例中,平衡板可以提供冷却气流动力学以及实质性的平衡功能。
电动马达10可以联接到带有控制器152的控制系统150。控制器152包括处理器154(例如,微处理器单元和/或其他类型的电路)和存储器156(例如,随机存取存储器、只读存储器、保持活动(不失效)存储器、这些的组合等)。控制器152可以构造成将控制命令发送到系统部件158并且接收来自传感器160和其他合适部件的信号。可控部件可以包括电动马达10(例如,马达的定子)。可以理解,可控部件可以包括致动器以使部件能够调节。传感器可以包括马达温度传感器162、转子位置传感器164等。因此,控制器152可以接收指示马达的速度的信号,并且基于该速度信号调节马达的输出。电动马达中的其他可控部件能以类似的方式工作。此外,可以理解,控制器152可以经由有线和/或无线通信发送和接收信号。
图2示出电动马达10的第二端视图200。电动马达10可以与图1的电动马达10相同或非常相似。提供了包括x轴、y轴和z轴的坐标系290以供参考。坐标系290可以与图1的坐标系190相同。在一个示例中,z轴可以是竖直轴线,x轴可以是横向轴线,和/或y轴可以是纵向轴线。然而,在其他示例中,这些轴线可以具有其他定向。第二端视图200可以是在坐标系290的垂直于电动马达10的旋转轴的x-z平面中限定的电动马达10的剖视图。电动马达的旋转轴可以平行于坐标系290的y轴,并且可以与图1的旋转轴线118相同。
电动马达10被封围在周向的马达壳体210中。周向的马达壳体210可以与图1的马达壳体102相同。定子220同心地布置在马达壳体210内,包括环形定子芯部230。定子220可以与图1的定子104相同。定子芯部230可包括在定子芯部的内周缘260上的多个定子齿250。多个定子齿250可沿定子芯部230的内周缘260均匀间隔,并且可分隔多个定子槽240中相邻的定子槽270。在图2所示的电动马达10的实施例中,多个定子槽240包括48个定子槽,因此多个定子齿250包括48个定子齿;然而,包括不同数量的定子齿和定子槽的其他实施例也是可能的。每个定子槽270可以是从定子芯部230径向切出的。每个定子槽270可以包括以近似梯形形状彼此连续连接的四个矩形层,每个后续层在径向方向上的宽度(层在与切口的径向方相切的方向上的范围)都大于前一层。换言之,定子槽的第一层,最靠近定子芯部230的内周缘260的第一层,可以具有比定子槽的第二相邻层更小的宽度(例如,第一层可以在径向方向上比第二层更长),依此类推。在一些实施例中,定子槽的每一层的横截面积可以相同;然而,此类实施例不应视为限制性的,并且每一层的横截面积可基于设计规范而变化。在图2的电动马达的其他示例实施例中,每个定子槽270内可包括不同数量的层。每个定子槽270的每一层可以包括螺纹形穿过定子槽的发夹线的成对腿部(未示出)。其中包括发夹线的定子槽的其他细节参考图4B提供。转子280同心地放置在定子芯部230内,转子280可以响应于定子内产生的磁场而相对于定子220旋转。转子280可以与图1的转子112相同。气隙可以将定子220和转子280分开,允许两者之间相对运动。换言之,第四层可以靠近电动马达10的转子280,第三层与第四层相邻,第二层与第三层相邻,而第一层与第二层相邻。
以这种方式,图2可以提供用于电动马达10的定子220的导电绕组的系统,其包括周向地围绕内圆柱形表面(例如内周缘260)均匀间隔的多个定子槽240,多个定子槽240中的每个槽270从定子220的内圆柱形表面朝向定子的外圆柱形表面发散,并且不同宽度的导电绕组插入多个槽240的每个槽270内。在系统内,每个槽270可以包括四组导电绕组,其中导电绕组的宽度从靠近定子220的内圆柱形表面的槽的第一端朝向靠近定子的外圆柱形表面的径向槽的第二端增加,每组导电绕组包括两个相同尺寸的导电绕组。
用于定子(比如图1的定子104和图2的定子220)的导电绕组由发夹线提供。图3A-3D示出了示例发夹线的平面图。示例发夹线的平面图可以在坐标系390的x-z平面中获得。图3A-3D中的体现的发夹线可以有不同的腿部宽度。
图3A示出了发夹线300的第一示例。发夹线300可以是U形导线部段(比如铜),在一端(例如,匝端)处通过端匝302连结在一起。发夹线300的U形可包括从公共连接点(端匝302)向外延伸的两个腿部,由此发夹线300在x-z平面中限定凹入形状(例如,相对于坐标系390的z轴向下凹入),从而腿部310、312的腿端部308相互平行,并且平行于例如z轴。发夹线300的腿部310、312的另一端(例如连接端)彼此间隔开。两个腿部310、312中的每一个都包括从端匝302延伸的直部段304、弯曲部段306和直腿端部308。在定子组装期间,腿部310、312在它们仍然是直的时插入到定子(比如图1的定子104和图2的定子220)中,从定子的插入侧(例如,插入侧与电动马达的侧部相同,如图1的电动马达10的第一端视图100和图2的电动马达10的第二端视图200)进入相应的槽中。腿部310、312可以延伸穿过定子,直腿端部308延伸经过定子本体的连接侧。定子的连接侧上的直腿端部308然后可以向外弯曲,以便在发夹线之间形成电连接。发夹线300可以包括发夹线的腿部310、312的直部段304之间的间距,该间距为第一跨度314。第一跨度314于是可以等于定子槽之间的距离(比如图2的多个定子槽240的定子槽),发夹线300的每个腿部都插入这些定子槽中。发夹线300的每个腿部310、312包括以相同的第二跨距318弯曲的弯曲部段306,第二跨度318从端匝302向外延伸。波形绕组可以通过在它们各自的连接端处将交替的多根发夹线串联连接在一起而形成。
图3B示出了发夹线320的第二示例。发夹线300、320的各自的腿部可以具有不同的宽度(可以将发夹线的腿部的宽度限定为沿x轴的腿的厚度)(例如,腿部330、332的宽度336),但在其他方面可以具有相同的设计。具体而言,发夹线320可包括端匝322、两个腿部330、332,每个腿部包括从端匝322延伸的直部段324、弯曲部段326和直腿端部328。另外,腿部330、332之间的第一跨度334可略大于图3A的腿部310、312之间的第一跨度314,跨度的增加是由于相邻槽中沿径向方向的层之间的分离增加所致。类似地,每个腿部330、332的第二跨度338可以与图3A的腿部310、312的第二跨度318相同。在分别在图3A和图3B中描绘的发夹线300、320的平面图中,这对应于发夹线320的腿部330、332的宽度336大于图3A的发夹线300的腿部310、312的宽度316。
图3C示出了发夹线340的第三示例。发夹线300、320、340中的每一个可以具有不同的腿部宽度,但是可以在其他方面具有相同的设计。具体而言,发夹线340可包括端匝342、两个腿部350、352,每个腿部包括从端匝342延伸的直部段344、弯曲部段346和直腿端部348。另外,腿部350、352之间的第一跨度354可略大于图3B的腿部330、332之间的第一跨度334,跨度的增加是由于相邻槽中沿径向方向的层之间的分离增加所致。在分别在图3A、图3B和图3C中描绘的发夹线300、320、340的平面图中,这对应于发夹线340的腿部350、352的宽度356大于图3A的发夹线300的腿部310、312的宽度316以及图3B的发夹线320的腿部330、332的宽度336中的每一个。
图3D示出第四示例发夹线360。发夹线300、320、340、360中的每一个可以具有不同的腿部宽度,但是可以在其他方面具有相同的设计。具体而言,发夹线360可包括端匝362、两个腿部370、372,每个腿部包括从端匝362延伸的直部段364、弯曲部段366和直腿端部368。另外,腿部370、372之间的第一跨度374可略大于图3C的腿部350、352之间的第一跨度354,跨度的增加是由于相邻槽中沿径向方向的层之间的分离增加所致。在分别在图3A、图3B、图3C和图3D中描绘的发夹线300、320、340、360的平面图中,这对应于发夹线360的腿部370、372的宽度376大于图3A的发夹线300的腿部310、312的宽度316、图3B的发夹线320的腿部330、332的宽度336、以及图3C的发夹线340的腿部350、352的宽度356中的每一个。
图3A、3B、3C和3D的发夹线300、320、340、360然后可以分别插入到定子(比如图2的定子220)的定子槽(比如图2的定子槽270)中并在定子的连接端处串联连接,以形成一组定子绕组。定子绕组然后可以包括电动马达的一相或多相(比如图1-2的电动马达10)。
图3A-图3D中描绘的发夹线可包括在电动马达(比如图1的电动马达10)的定子槽内。图4A-4B示出定子槽的实施例,包括矩形定子槽400的第一实施例和分段式定子槽410的第二实施例,分段式定子槽410包括四个不同宽度的矩形层。坐标系490包括在图4A-图4B中,坐标系490与图2的坐标系290和图1的坐标系190相同。定子槽400、410从电动马达(比如图1、图2的电动马达10)的定子(比如分别为图1、图2的定子104、220)的端视图示出,该端视图在垂直于坐标系490的x-z平面的平面中,该平面可以是垂直于电动马达的旋转轴线(比如图1的旋转轴线118)的平面。
具体地,图4A示出矩形定子槽400,矩形定子槽400包括多个矩形发夹线腿部404。矩形定子槽400可以是本领域技术人员公知的常见设计。多个矩形发夹线腿部404中的每个矩形发夹线腿部可以具有相等的横截面积,并且具体地,可以具有相同的高度406和宽度402。另外,多个矩形发夹线的相邻矩形发夹线腿部404在它们之间可以具有相同的间距408。在一个示例中,在发夹线的腿部的边缘之间形成的角部可以倒角,以防止损坏矩形定子槽400内的绝缘衬里(未示出)。多个矩形发夹线腿部404可以以给定的填充系数来填充矩形定子槽400。填充系数是多个矩形发夹线腿部404的总横截面积与矩形定子槽400的总横截面积之比。
图4B示出了分段式定子槽410,其包括具有相同横截面积但具有不同宽度的四个矩形层,分段式定子槽410被包括为从电动马达(比如图1-图2的电动马达10)中的定子(比如图1的定子104和图2的定子220)切割出的切口。分段式定子槽410可以在形状上分段以便近似梯形槽,槽的每一层的宽度从靠近转子(比如图2的转子280)的第一端到靠近电动马达的马达壳体(比如图2的马达壳体210)的第二端发散。分段式定子槽410包括两层或更多层,每一层容纳一根或多根相应的发夹线的一个或多个腿部。在图4B描绘的实施例中,分段式定子槽410包括第一层476,第一层是定子槽的四层中最靠近定子的内周缘(比如图2的内周缘260)的层。在图4B中描绘的实施例中,第一层476、第二层474、第三层472和第四层468中的每一层都可以容纳两个对应的发夹线的两个腿部,其中成对发夹线的每个腿部的横截面积可以是相同的,并且可以与图4A的多根发夹线404中的每一个的横截面积相同。然而,此实施例可被视为非限制性的,且在其他实施例中,成对发夹线的腿部的每一个腿部的横截面积可根据设计规范而随层变化。特别地,第一层476在其中包括矩形发夹线腿部的第一对450,发夹线腿部的第一对450中的每个腿部432、428属于单独的发夹线。第一腿部432可以比第二腿部428更靠近定子的内周缘,第二腿部428被定位成在分段式定子槽410的第一层476内在径向方向上(例如,沿着定子槽410的长度延伸的方向,该方向平行于坐标系490的z轴的正z方向)相邻于第一腿部432并经过第一腿部432。发夹线腿部的第一对450可具有第一高度464和第一宽度462,并且可以具有与定子槽的第一层476相同或大致相同(在5%以内)的纵横比,以给定的填充系数填充定子槽。另外,第一宽度462可以基本上等于图4A的多根发夹线腿部404中的每一个的宽度402。在一个示例中,分段式定子槽410的第一层476内的发夹线腿部的第一对450的填充系数可以与图4A的矩形定子槽400内的多个矩形发夹线腿部404的填充系数相同。与图4A类似,发夹线腿部的第一对450中的每个腿部432、428可以具有倒角的角部,以减少分段式定子槽410内的绝缘衬里(未示出)的劣化。另外,分段式定子槽410的第一层476的内边缘也可以具有倒角的角部,以便减少分段式定子槽内的绝缘衬里的劣化。发夹线腿部的第一对450可在第一层476内的一对之间具有第一间隔部466。
第二层474放置在分段式定子槽410的第一层476的正上方(例如,沿着坐标系490的z轴在正z方向上前进)。第二层474可以连续地连接到第一层476,放置成使得第二层474的宽度(例如,第二层474在沿着坐标系490的x轴的方向上的范围)的中间可以沿径向方向与第一层476的宽度的中间对齐。第二层474的横截面积可与第一层476的横截面积相同,但第二层474的纵横比可大于第一层476的纵横比,使得第二层474的宽度延伸超过第一层的宽度,而第二层474的高度(例如,第二层474在沿着坐标系490的z轴的方向上的范围)小于第一层476的高度。
第二层474在其中包括矩形发夹线腿部的第二对440,发夹线腿部的第二对440的每个腿部426、424来自单独的发夹线。第三腿部426可以比第四腿部424更靠近定子的内周缘,第四腿部424在分段式定子槽410的第二层474内在径向方向上与第三腿部426相邻并经过第三腿部426。发夹线腿部的第二对440可具有给定的第二高度454和第二宽度452,并且可以具有与定子槽的第二层474相同或大致相同(在5%以内)的纵横比,以给定的填充系数填充定子槽。第二层474内的发夹线腿部的第二对440的填充系数可以与分段式定子槽410的第一层476内的发夹线腿部的第一对450的填充系数相同。发夹线腿部的第二对440的每个腿部426、424可以具有倒角的角部,以便减少分段式定子槽410内的绝缘衬里(未示出)的劣化。另外,分段式定子槽410的第二层474的内边缘也可以具有倒角的角部,以便减少分段式定子槽内的绝缘衬里的劣化。第二腿部428和第三腿部426可以在它们之间具有第二间隔部458,并且发夹线腿部的第二对440可以在第二层474内的发夹线腿部的第二对440之间具有第三间隔部456,使得发夹线腿部的第二对440的每个腿部426、424可以在分段式定子槽410的第二层474内均匀地间隔开。
第三层472放置在分段式定子槽410的第二层474的正上方(例如,沿着坐标系490的z轴在正z方向上前进)。第三层472可以连续地连接到第二层474,放置成使得第三层472的宽度的中间可以沿着径向方向与第二层474的宽度的中间对齐。第三层472的横截面积可以与第二层474和第一层476的横截面积中的每一个相同,但是第三层472的纵横比可以大于第二层474的纵横比,使得第三层472的宽度延伸超过第二层的宽度,而第三层472的高度小于第二层474的高度。
第三层472在其中包括矩形发夹线腿部的第三对430,发夹线腿部的第三对430的每个腿部422、418来自单独的发夹线。第五腿部422可以比第六腿部418更靠近定子的内周缘,第六腿部418在分段式定子槽410的第三层472内在径向方向上与第五腿部422相邻并经过第五腿部422。发夹线腿部的第三对430可具有给定的第三高度444和第三宽度442,并且可以具有与定子槽的第三层472相同或大致相同(在5%以内)的纵横比,以给定的填充系数填充定子槽。第三层472内的发夹线腿部的第三对430的填充系数可以与分段式定子槽410的第二层474内的发夹线腿部的第二对440和第一层476内的发夹线腿部的第一对450的填充系数中的每一个相同。发夹线腿部的第三对430的每个腿部422、418可以具有倒角的角部,以便减少分段式定子槽410内的绝缘衬里(未示出)的劣化。另外,分段式定子槽410的第三层472的内边缘也可以具有倒角的角部,以便减少分段式定子槽内的绝缘衬里的劣化。第四腿部424和第五腿部422可以在它们之间具有第四间隔部448,并且发夹线腿部的第三对430可以在第三层472内的发夹线腿部的第三对430之间具有第五间隔部446,使得发夹线腿部的第三对430的每个腿部422、418可以在分段式定子槽410的第三层472内均匀地间隔开。第四间隔部448和第二间隔部458的尺寸可以定为使得发夹线腿部的第二对440可以均匀地放置在第二层474内。
第四层468放置在分段式定子槽410的第三层472的正上方(例如,沿着坐标系490的z轴在正z方向上前进)。第四层468可以连续地连接到第三层472,放置成使得第四层468的宽度的中间可以沿着径向方向与第三层472的宽度的中间对齐。第四层468的横截面积可以与第三层472、第二层474和第一层476的横截面积中的每一个相同,但是第四层468的纵横比可以大于第三层的纵横比,使得第四层的宽度延伸超过第三层的宽度,而第四层的高度小于第三层的高度。
第四层468在其中包括矩形发夹线腿部的第四对420,矩形的发夹线腿部的第四对420的每个腿部416、414来自单独的发夹线。第七腿部416可以比第八腿部414更靠近定子的内周缘,第八腿部414在分段式定子槽410的第四层468内在径向方向上与第七腿部416相邻并经过第七腿部416。发夹线腿部的第四对420可具有给定的第四高度434和第四宽度412,并且可以具有与定子槽的第四层468相同或大致相同(在5%以内)的纵横比,以给定的填充系数填充定子槽。第四层468内的发夹线腿部的第四对420的填充系数可以与分段式定子槽410的第三层472内的发夹线腿部的第三对430、第二层474内的发夹线腿部的第二对440和第一层476内的发夹线腿部的第一对450的填充系数中的每一个相同。发夹线腿部的第四对420的每个腿部416、414可以具有倒角的角部,以便减少分段式定子槽410内的绝缘衬里(未示出)的劣化。另外,分段式定子槽410的第四层468的内边缘也可以具有倒角的角部,以便减少分段式定子槽内的绝缘衬里的劣化。第六腿部418和第七腿部416可以在它们之间具有第六间隔部438,并且发夹线腿部的第四对420可以在第四层468内的发夹线腿部的第四对420之间具有第七间隔部436,使得发夹线腿部的第四对420的每个腿部416、414可以在分段式定子槽410的第四层468内均匀地间隔开。第四间隔部448和第六间隔部438可以尺寸设为使得发夹线腿部的第三对430可以均匀地放置在第三层472内。
可以选择成对腿部450、440、430、420的每一对的纵横比以满足电动马达的特定设计标准。例如,选择成对腿部450、440、430、420的每一对的纵横比的自由度可用于减少与趋肤效应和邻近效应相关联的电损耗。靠近定子的内周缘的发夹线腿部的纵横比可以制作的得更小,而远离定子的内周缘的线横截面可以制作的更大。以这种方式,可以降低高频下的总铜损耗(包括AC损耗)。与常规的发夹式绕组相比,定子槽设计规格的这种自由度也可能是额外的优势。
以这种方式,图4B的分段式定子槽410示出了用于将导电绕组容纳在电动马达的定子内的系统,该系统包括具有第一宽度的第一组导电绕组(例如,包括发夹线),其插入到沿着定子的内表面定位的分段式定子槽410的第一层476内,以及具有第二宽度的第二组导电绕组,其插入到分段式定子槽的第二层474内,第二宽度大于第一宽度。该系统还可以包括具有第三宽度的第三组导电绕组,其插入到槽的定位成与第二层474相邻的第三层472内,以及具有第四宽度的第四组导电绕组,其插入到槽的定位成与第三层472相邻的第四层468内,第三宽度大于第二宽度,并且第四宽度大于第三宽度。第一组导电绕组、第二组导电绕组、第三组导电绕组和第四组导电绕组中的每一个可以包括具有相同宽度的对应的两个导电绕组中的每一个的腿部。分段式定子槽410的相应层内的导电绕组的腿部可具有与相应层基本相等(例如,在5%以内)的宽度,使得第一宽度可基本上等于第一层476的第五宽度,第二宽度可以基本上等于第二层474的第六宽度,第三宽度可以基本上等于第三层472的第七宽度,并且第四宽度可以基本上等于第四层468的第八宽度。分段式定子槽410可包括对应于四个宽度的八个导电绕组的八个腿部,分段式定子槽410是定子的多个槽(比如图2的多个定子槽240)之一,多个槽中的相邻的槽由矩形定子齿(比如图2的定子齿250)分隔开。
以这种方式,与常规的矩形定子槽内的矩形发夹线相比,并且与梯形槽内的圆线相比,利用不同宽度的定子槽内的层,电动马达的定子内的矩形发夹线的DC电阻可以降低。沿定子径向方向向外增加定子槽的层的宽度的技术效果是:相邻槽之间的定子齿内的磁通量可以保持近似恒定,从而提高电动马达的效率。此外,对于电动马达的给定外径,与矩形定子槽相比,槽面积可以增加,从而减少定子齿的铁的量,同时保持每个定子齿的总磁通量相同。与常规矩形定子槽设计相比,该设计因此可以增加每个定子齿的磁通密度。此外,这种设计的填充系数可以大于圆线在梯形定子槽中的填充系数,并且与矩形定子槽中的发夹线相同,从而提高电动马达的功率密度。最后,通过使用发夹线,与将圆线插入梯形槽内相比,可以简化电动马达的制造。
本公开提供了对用于电动马达的定子组件的系统的支持,系统包括:围绕定子的内圆柱形表面定位的多个分段式槽,以及堆叠在分段式槽的每一个内的多根不同宽度的发夹线。在该系统的第一示例中,每个分段式槽包括两层或更多层,每层容纳一根或多根对应的发夹线的一个或多个腿部。在该系统的第二个示例中,其可选地包括第一个示例,两层或更多层中的第一层的第一宽度小于两层或更多层中的第二层的第二宽度,第一层靠近定子的内圆柱面。在系统的第三示例中,其可选地包括第一示例和第二示例中的一个或两个,两层或更多层包括四层,其中,两层或更多层中的第三层的第三宽度小于第二宽度,并且其中,两层或更多层中的第四层的第四宽度小于第三宽度。在该系统的第四示例中,其可选地包括第一示例至第三示例中的一个或多个或每一个,第四层靠近电动马达的转子,其中,第三层与第四层相邻,其中,第二层与第三层相邻,并且其中,第一层与第二层相邻。在该系统的第五示例中,其可选地包括第一示例至第四示例中的一个或多个或每一个,第一层、第二层、第三层和第四层中的每一个容纳两个对应的发夹线的至少两个腿部。在该系统的第六示例中,其可选地包括第一示例至第五示例中的一个或多个或每个,多根发夹线包括第五宽度的第一组发夹线,第一组发夹线的每一根发夹线的一个腿部插入第一层内,以及第六宽度的第二组发夹线,第二组发夹线的每一根发夹线的一个腿部插入第二层内。在该系统的第七示例中,其可选地包括第一示例至第六示例中的一个或多个或每个,多根发夹线包括第七宽度的第三组发夹线,第三组发夹线的每一根发夹线的一个腿部插入第三层内,以及第八宽度的第四组发夹线,第四组发夹线的每一根发夹线的一个腿部插入第四层内。在系统的第八示例中,其可选地包括第一示例至第七示例中的一个或多个或每一个,第一组、第二组、第三组和第四组发夹线中的每一个包括两根发夹线。在系统的第九示例中,其可选地包括第一示例至第八示例中的一个或多个或每一个,第五宽度小于第六宽度,其中,第六宽度小于第七宽度,并且其中,第七宽度小于比第八宽度。在系统的第十示例中,其可选地包括第一示例至第九示例中的一个或多个或每一个,第一宽度基本上等于第五宽度,其中,第二宽度基本上等于第六宽度,其中,第三宽度是基本上等于第七宽度,并且其中,第四宽度基本上等于第八宽度。
本公开提供了对用于电动马达的定子的导电绕组的系统的支持,包括:具有第一宽度的第一组导电绕组,其插入沿定子内表面定位的槽的第一层内,以及具有第二宽度的第二组导电绕组,其插入槽的第二层内,第二宽度大于第一宽度。在该系统的第一示例中,槽在形状上是分段的,槽的宽度从靠近转子的第一端到靠近电动马达的壳体的第二端发散。在系统的第二示例中,其可选地包括第一示例,该系统还包括:具有第三宽度的第三组导电绕组,其插入到槽的定位成与第二层相邻的第三层内,以及具有第四宽度的第四组导电绕组,其插入到槽的定位成与第三层相邻的第四层内,第三宽度大于第二宽度,并且第四宽度大于第三宽度。在该系统的第三示例中,其可选地包括第一示例和第二示例中的一个或两个,第一组、第二组、第三组和第四组导电绕组中的每一个包括具有相同宽度的对应的两个导电绕组中的每一个的一个腿部。在该系统的第四示例中,其可选地包括第一示例至第三示例中的一个或多个或每一个,槽包括对应于四个宽度的八个导电绕组的八个腿部。在系统的第五示例中,其可选地包括第一示例至第四示例中的一个或多个或每一个,槽是定子的多个槽中的一个,并且其中,多个槽中的相邻的槽由矩形定子齿分隔开。
本公开提供了对用于电动马达的定子的导电绕组的系统的支持,包括:围绕内圆柱形表面周向均匀间隔的多个径向槽,每个槽从定子的内圆柱形表面朝向定子的外圆柱形表面发散,以及插入每个径向槽内的不同宽度的导电绕组。在该系统的第一示例中,每个径向槽包括四组导电绕组,导电绕组的宽度从径向槽靠近定子的内圆柱形表面的第一端朝向径向槽靠近定子的外圆柱形表面的第二端增加。在该系统的第二示例中,其可选地包括第一示例,每组导电绕组包括两个相同尺寸的导电绕组。
图2-图4B示出了带有各种部件的相对定位的示例构造。如果示出为彼此直接接触或直接联接,则至少在一个示例中这样的元件可以分别称为直接接触或直接联接。类似地,至少在一个示例中,示出为彼此连续或相邻的元件可以分别是彼此连续或彼此相邻的。作为示例,放置为彼此面共用接触的部件可以称为面共用接触。作为另一个示例,在至少一个示例中,定位成彼此间隔开、其间仅具有间隔空间而没有其他部件的元件可以如此称呼。作为又一个示例,元件示出为在彼此上方/下方、彼此相对侧或彼此左/右可以相对于彼此如此称呼。此外,如附图中所示,在至少一个示例中,最顶部元件或元件的点位可以称为部件的“顶部”,而最底部元件或元件的点位可以称为部件的“底部”。如本文所使用的,顶部/底部、上部/下部、上方/下方可以是相对于附图的竖直轴线并且用于描述附图的元件相对于彼此的定位。因此,在一个示例中,示出为在其他元件上方的元件竖直地定位在该其他元件上方。作为又一个示例,在附图中描绘的元件的形状可称为具有如此形状(例如,诸如圆形的、直线的、平面的、弯曲的、圆钝的、倒角的、成角度的等等)。此外,在至少一个示例中,示出为彼此相交的元件可以称为相交元件或彼此相交。更进一步地,在一个示例中,示出为在另一个元件内或在另一个元件外的元件可以如此称呼。
要注意的是,本文包括的示例控制和估计例程可以与各种电动马达和/或车辆系统构造一起使用。本文公开的控制方法和例程可以作为可执行指令存储在非暂态存储器中,并且可以由包括与各种传感器、致动器和其他电动马达硬件结合的控制器的控制系统来执行。本文描述的特定例程可以代表任何数量的诸如事件驱动、中断驱动、多任务、多线程等的处理策略中的一个或多个。这样,所示出的各种动作、操作和/或功能可以以所示出的顺序、并行地来执行,或者在某些情况下省去。同样,实现本文描述的示例实施例的特征和优点的处理顺序不是必要的,而是为了便于说明和描述而提供。取决于被使用的特定策略,可以重复地执行所示的动作、操作和/或功能中的一个或多个。此外,所描述的动作、操作和/或功能可以图形地表示待被编程到电动马达控制系统中的计算机可读存储介质的非暂态存储器中的代码,其中所描述的动作通过在包括各种硬件部件并且与电子控制器结合在一起的系统中执行指令来执行。
可以理解,本文公开的构造和例程本质上是示例性的,并且这些具体实施例不应被认为是限制性的,因为可以进行多种变化。例如,上述技术可以应用于各种类型的电动马达。此外,除非明确相反地说明,否则术语“第一”、“第二”、“第三”等并不意在表示任何顺序、位置、数量或重要性,而是仅仅用作区一个元件与另一个元件的标签。本公开的主题包括本文公开的各种系统和构造以及其他特征、功能和/或特性的所有新颖且非显而易见的组合和子组合。
如本文所使用的,除非另外指明,否则术语“大约”解释为表示该范围的正负百分之五。
所附权利要求书特别指出了被认为是新颖且非显而易见的某些组合和子组合。这些权利要求书可以指“一个”元件或“第一”元件或其等同物。应当将这种权利要求书理解为包括一个或多个这种元件的结合,既不需要也不排除两个或多个这种元件。在本申请或相关申请中,可以通过修改本权利要求书或通过提出新权利要求书来主张所公开的特征、功能、元件和/或特性的其他组合和子组合。这种权利要求书,无论在范围上与原权利要求书相比更宽、更窄、相等还是不同,都被认为包括在本公开的主题内。