一种工业机器人
文献发布时间:2023-06-19 09:29:07
技术领域
本发明属于机器人领域,更具体地说,尤其是涉及到一种工业机器人。
背景技术
工业机器人是一种通过系统终端编程与机器人的机械臂内的液压系统相匹配后,通过远程终端控制液压系统中油液的推进与抽取,从而控制工业机器人的机械手臂对工件进行夹紧。
基于上述本发明人发现,现有的主要存在以下几点不足,比如:由于工业机器人的装夹手臂通常为左右两侧滑动的夹紧板,而当利用设备对球状物体进行夹取时,而球状物体与夹紧板间的夹紧端面只有左右两点且面积较小,在升降的过程中球状物体容易因惯性而旋转偏移最终掉落。
因此需要提出一种工业机器人。
发明内容
为了解决上述技术由于工业机器人的装夹手臂通常为左右两侧滑动的夹紧板,而当利用设备对球状物体进行夹取时,而球状物体与夹紧板间的夹紧端面只有左右两点且面积较小,在升降的过程中球状物体容易因惯性而旋转偏移最终掉落的问题。
本发明一种工业机器人的目的与功效,由以下具体技术手段所达成:其结构包括装夹机构、液压轴、液压臂、动力轴、固定底座,所述装夹机构嵌固安装在液压轴的左侧外端面,所述液压轴嵌固安装在液压臂的正上方,所述液压臂活动卡合安装在动力轴的正上方,所述动力轴位于固定底座的外侧上端面,所述固定底座嵌固安装在液压臂的正下方;所述装夹机构包括定位螺栓、连接杆、第一嵌固块、转轴、活动杆、装夹板,所述定位螺栓均匀镶嵌卡合安装在第一嵌固块的外侧端面,所述连接杆镶嵌安装在第一嵌固块的正上方,所述第一嵌固块下端面活动卡合安装着转轴,所述转轴对称安装在活动杆的上端左右两侧,所述活动杆下端面活动卡合连接着装夹板,所述装夹板对称安装在第一嵌固块下端的左右两侧。
其中,所述装夹板包括夹紧机构、防滑块、连接板、连接轴,所述夹紧机构镶嵌卡合安装在连接轴的正上方,所述防滑块对称安装在夹紧机构的左右两端,所述连接板嵌固安装在防滑块的正下方,所述连接轴通过焊接安装在连接板的正下方,所述连接轴的下端外侧面设有圆弧状内轮廓。
其中,所述夹紧机构包括第一滑轨、贴合板、第二转轴、弹性绳、第二滑轨,所述第一滑轨镶嵌卡合安装在夹紧机构的上端内侧面,所述贴合板嵌固安装在第二滑轨的正上方,所述第二转轴活动卡合安装在第二滑轨的正上方,所述弹性绳镶嵌卡合连接着防滑块且末端连接在贴合板的上端外表面,所述第二滑轨对称嵌固在贴合板下端的左右两侧,所述贴合板下端外轮廓设有梯状折叠式凹槽。
其中,所述防滑块包括镶嵌块、第三转轴、弹簧、活动块、活动槽,所述镶嵌块活动卡合连接着第三转轴,所述第三转轴位于活动槽的左侧方,所述弹簧镶嵌卡合安装在活动块的上端左侧面,所述活动块镶嵌卡合安装在活动槽的内侧端面,所述活动槽镶嵌设于镶嵌块的右侧下方,所述贴合板与镶嵌块的连接端面间设有倾斜面缺口。
其中,所述贴合板包括第二嵌固块、固定块、空气口、橡胶片、单向口,所述第二嵌固块对称安装在单向口外侧端面的左右方,所述固定块嵌固安装在空气口的内侧下端面,所述空气口镶嵌设于橡胶片的内侧上端面,所述橡胶片嵌固安装在第二嵌固块的正上方,所述单向口镶嵌卡合安装在贴合板的内侧下端面,所述空气口的内端外轮廓采用可塑性较强的橡胶圈。
其中,所述单向口包括第二镶嵌块、钢片、相吸磁组、橡胶条,所述第二镶嵌块镶嵌卡合连接着橡胶条,所述钢片镶嵌设于橡胶条的内侧上侧面,所述相吸磁组镶嵌卡合安装在橡胶条的内端左侧面,所述橡胶条横向外侧端面镶嵌卡合连接着第二嵌固块,所述相吸磁组与橡胶条皆设有左右两组,且相吸磁组的磁性相吸。
与现有技术相比,本发明具有如下有益效果:
1.在弹性绳拉扯的同时左右两侧的防滑块会向中聚拢增加设备有物件表面的摩擦力,且通过弹性绳的拉扯会带动镶嵌块以第三转轴为中心支点向左摆动逐渐抬起防滑块,使左右两侧的防滑块形成倾斜状夹角,使其夹角表面直径大于球状物件横向直径。
2.当橡胶片内的空气全部被挤压排出时,橡胶片的内端面会贴合在第二嵌固块的上端外表面,使两者的连接端面形成紧密贴合状,利用内外气压的相差与橡胶片形成吸盘效果,紧紧贴合在球状物件表面,能够有效对物件进行吸附,避免球状物件因连接端面面积狭小导致的表面摩擦力减少使其难以被夹紧的问题。
附图说明
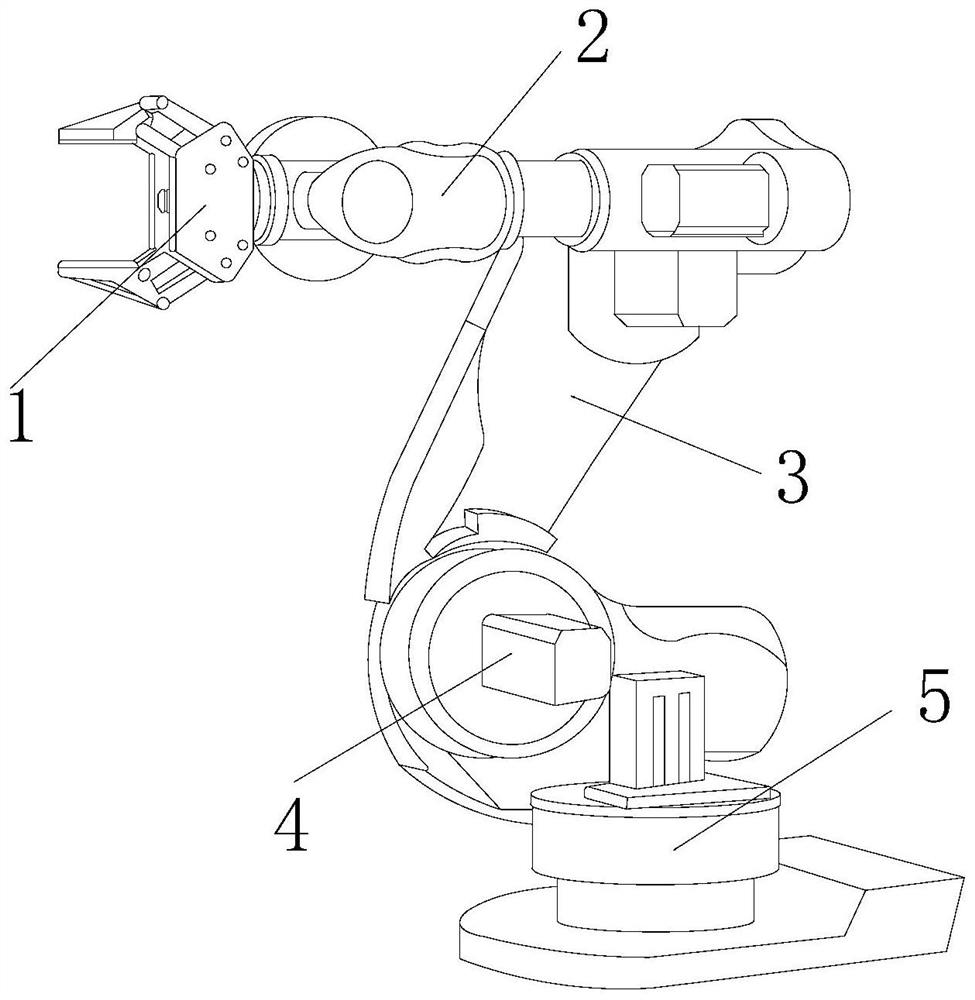
图1为本发明一种工业机器人的整体结构示意图。
图2为本发明一种工业机器人装夹机构的结构示意图。
图3为本发明一种工业机器人装夹板的结构示意图。
图4为本发明一种工业机器人夹紧机构的结构示意图。
图5为本发明一种工业机器人防滑块的结构示意图。
图6为本发明一种工业机器人贴合板的结构示意图。
图7为本发明一种工业机器人单向口的结构示意图。
图中:装夹机构-1、液压轴-2、液压臂-3、动力轴-4、固定底座-5、定位螺栓-11、连接杆-12、第一嵌固块-13、转轴-14、活动杆-15、装夹板-16、夹紧机构-161、防滑块-162、连接板-163、连接轴-164、第一滑轨-611、贴合板-612、第二转轴-613、弹性绳-614、第二滑轨-615、镶嵌块-621、第三转轴-622、弹簧-623、活动块-624、活动槽-625、第二嵌固块-121、固定块-122、空气口-123、橡胶片-124、单向口-125、第二镶嵌块-251、钢片-252、相吸磁组-253、橡胶条-254。
具体实施方式
以下结合附图对本发明做进一步描述:
实施例1:
如附图1至附图5所示:
本发明提供一种工业机器人,其结构包括装夹机构1、液压轴2、液压臂3、动力轴4、固定底座5,所述装夹机构1嵌固安装在液压轴2的左侧外端面,所述液压轴2嵌固安装在液压臂3的正上方,所述液压臂3活动卡合安装在动力轴4的正上方,所述动力轴4位于固定底座5的外侧上端面,所述固定底座5嵌固安装在液压臂3的正下方;所述装夹机构1包括定位螺栓11、连接杆12、第一嵌固块13、转轴14、活动杆15、装夹板16,所述定位螺栓11均匀镶嵌卡合安装在第一嵌固块13的外侧端面,所述连接杆12镶嵌安装在第一嵌固块13的正上方,所述第一嵌固块13下端面活动卡合安装着转轴14,所述转轴14对称安装在活动杆15的上端左右两侧,所述活动杆15下端面活动卡合连接着装夹板16,所述装夹板16对称安装在第一嵌固块13下端的左右两侧。
其中,所述装夹板16包括夹紧机构161、防滑块162、连接板163、连接轴164,所述夹紧机构161镶嵌卡合安装在连接轴164的正上方,所述防滑块162对称安装在夹紧机构161的左右两端,所述连接板163嵌固安装在防滑块162的正下方,所述连接轴164通过焊接安装在连接板163的正下方,所述连接轴164的下端外侧面设有圆弧状内轮廓,可供活动杆15进行连接,通过对活动杆15的末端进行控制可改变装夹板16的摆动与转向。
其中,所述夹紧机构161包括第一滑轨611、贴合板612、第二转轴613、弹性绳614、第二滑轨615,所述第一滑轨611镶嵌卡合安装在夹紧机构161的上端内侧面,所述贴合板612嵌固安装在第二滑轨615的正上方,所述第二转轴613活动卡合安装在第二滑轨615的正上方,所述弹性绳614镶嵌卡合连接着防滑块162且末端连接在贴合板612的上端外表面,所述第二滑轨615对称嵌固在贴合板612下端的左右两侧,所述贴合板612下端外轮廓设有梯状折叠式凹槽,通过该凹槽与第二滑轨615的镶嵌配合,使贴合板612上端受力时可使其向下沉陷。
其中,所述防滑块162包括镶嵌块621、第三转轴622、弹簧623、活动块624、活动槽625,所述镶嵌块621活动卡合连接着第三转轴622,所述第三转轴622位于活动槽625的左侧方,所述弹簧623镶嵌卡合安装在活动块624的上端左侧面,所述活动块624镶嵌卡合安装在活动槽625的内侧端面,所述活动槽625镶嵌设于镶嵌块621的右侧下方,所述贴合板612与镶嵌块621的连接端面间设有倾斜面缺口,当弹性绳614拉扯镶嵌块621的同时,可使镶嵌块621以第三转轴622为中心支点向左摆动。
本实施例的具体使用方式与作用:
本发明通过远程终端控制液压臂3与液压轴2内的油液来带动控制装夹机构1内的连接杆,从而通过连接杆12带动控制活动杆15与装夹板16的夹紧动作,当利用设备对圆球状物体进行夹紧时,夹紧机构161内的贴合板612会首先贴合在物件表面,睡着装夹板16的组件夹紧,贴合板612会向内凹陷,在凹陷的同时带动其左右两侧的弹性绳614向下拉扯,而在弹性绳614拉扯的同时左右两侧的防滑块162会向中聚拢增加设备有物件表面的摩擦力,且通过弹性绳614的拉扯会带动镶嵌块621以第三转轴622为中心支点向左摆动逐渐抬起防滑块162,使左右两侧的防滑块162形成倾斜状夹角,使其夹角表面直径大于球状物件横向直径。
实施例2:
如附图6至附图7所示:所述贴合板612包括第二嵌固块121、固定块122、空气口123、橡胶片124、单向口125,所述第二嵌固块121对称安装在单向口125外侧端面的左右方,所述固定块122嵌固安装在空气口123的内侧下端面,所述空气口123镶嵌设于橡胶片124的内侧上端面,所述橡胶片124嵌固安装在第二嵌固块121的正上方,所述单向口125镶嵌卡合安装在贴合板612的内侧下端面,所述空气口123的内端外轮廓采用可塑性较强的橡胶圈,当其受力向下压陷时,下端面可贴合在弧顶块122的外轮廓上,同时拉扯空气口123使其形成扩张贴合在球形物体表面。
其中,所述单向口125包括第二镶嵌块251、钢片252、相吸磁组253、橡胶条254,所述第二镶嵌块251镶嵌卡合连接着橡胶条254,所述钢片252镶嵌设于橡胶条254的内侧上侧面,所述相吸磁组253镶嵌卡合安装在橡胶条254的内端左侧面,所述橡胶条254横向外侧端面镶嵌卡合连接着第二嵌固块121,所述相吸磁组253与橡胶条254皆设有左右两组,且相吸磁组263的磁性相吸,可有效保证其向外扩张后通过橡胶条254自身的弹性回弹后能够依旧贴合。
本实施例的具体使用方式与作用:
本发明中当球状物件挤压橡胶片124上端表面时,会贴合阻塞在空气口123的上方且使橡胶片124向内凹陷,在其凹陷的同时位于内部的空气会向下挤压至单向口125处,将单向口125内右侧的橡胶条254向外推动,当橡胶片124内的空气全部被挤压排出时,橡胶片124的内端面会贴合在第二嵌固块121的上端外表面,使两者的连接端面形成紧密贴合状,利用内外气压的相差与橡胶片124形成吸盘效果,紧紧贴合在球状物件表面,能够有效对物件进行吸附,避免球状物件因连接端面面积狭小导致的表面摩擦力减少使其难以被夹紧的问题。
利用本发明所述技术方案,或本领域的技术人员在本发明技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本发明的保护范围。
- 工业机器人、用于该工业机器人的组件系统以及用于组装该工业机器人的方法
- 一种工业机器人以及工业机器人关节