一种振动筛糠机去灰用可调节风拉机构
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及振动筛糠机风力调节机构技术领域,具体为一种振动筛糠机去灰用可调节风拉机构。
背景技术
糠,其本义指谷的外壳,全谷的一部分,属于种子的外层。含有糠的米为粗米,而去糠的米则为精米,糠是全谷的可使用部分。
现有振动筛糠机的风拉机构不能智能的对进行调节避免风拉机构内的相对通孔面积进行调节,存在糠原料中的灰尘吸附不完全以及将糠吸附走的问题。
发明内容
本发明的目的就在于为了解决如何对风拉机构进行调节避免风拉机构内的相对通孔面积过大或者过小,造成将糠吸附走或者糠原料中的灰尘吸附不完全的问题,而提出一种振动筛糠机去灰用可调节风拉机构;本发明通过对风机的输出功率以及像素格糠数进行分析得到分析面积,将分析面积与风拉机构内的相对通孔面积进行比对,然后通过处理器对风拉机构进行控制调节,进而调节相对通孔面积,方便对糠原料中的灰尘进行吸附,避免风拉机构内的相对通孔面积过大或者过小,造成将糠吸附走或者糠原料中的灰尘吸附不完全。
本发明的目的可以通过以下技术方案实现:包括数据采集模块、处理器、数据存储模块、数据分析模块、风机和安装在振动筛糠机内部的风拉机构;
所述风拉机构包括挡板,挡板的内部开设有安装槽,安装槽的内部滑动安装有移动板,所述移动板的一端通过螺栓固定安装有连接条,挡板的一侧侧壁安装有气缸,气缸的活塞杆顶端通过焊接与连接条固定连接;所述挡板的上端面开设有与安装槽贯通连接的矩形槽,所述移动板上均匀开设有若干个第一风孔,安装槽的底端面均匀开设有若干个与第一风孔一一对应的第二风孔。
优选的,所述风机通过管道与振动筛糠机的风管贯通连接,其中,风管的底端位于风拉机构的正上方,所述风机用于抽吸风拉机构下方糠原料中的灰尘并将其抽吸的灰尘输送至灰尘收集箱内;
所述数据采集模块用于采集灰尘收集箱内部的图片以及风机的输出功率和第二风孔与第一风孔在垂直方向上的相对通孔面积并将图片、输出功率和相对通孔面积发送至处理器;
所述处理器接收到图片、输出功率和相对通孔面积后将其发送至数据分析模块;所述数据分析模块对接收到图片、输出功率和相对通孔面积进行分析,具体分析步骤为:
步骤一:将接收到的图片放大若干倍形成像素格图片,对像素格图片中每个像素格进行颜色识别,当像素格中的颜色与糠的颜色相同时,像素格糠数增加一;
步骤二:将像素格糠数标记为K1;将风机的输出功率标记为K2;相对通孔面积标记为K3;
步骤三:将像素格糠数、输出功率进行归一化处理并取其数值,利用公式K=μ×[(1/K1)×b1+(1/K2)×b2-0.3987]获取得到分析面积K;其中,b1和b2均为预设面积换算系数;μ为校准系数,取值为0.93254;
步骤四:将分析面积与相对通孔面积进行比对,当分析面积等于相对通孔面积时,不进行操作;当分析面积大于相对通孔面积时,则生成增大指令,并利用公式ZD=(K-K3)×b3获取得到增长间距ZD;其中,b3为预设面积距离换算系数;数据分析模块将增大指令和增长间距ZD发送至处理器;当分析面积小于相对通孔面积时,则生成缩小指令,并利用公式SD=(K3-K)×b3获取得到缩减间距SD,数据分析模块将缩小指令和缩减间距SD发送至处理器;
所述处理器接收到增大指令和增长间距以及缩小指令和缩减间距后进行处理,具体处理过程为:当处理器接收到增大指令后,处理器控制气缸工作,通并使得气缸带动连接条向靠近安装槽的方向运动,且连接条的运动距离等于增长间距ZD;
当处理器接收到缩小指令后,处理器控制气缸工作,通并使得气缸带动连接条向远离安装槽的方向运动,且连接条的运动距离等于缩减间距SD。
优选的,所述振动筛糠机包括支架和筛糠箱体;支架上分别设置有第一支撑杆和第二支撑杆,筛糠箱体的底端面通过四个减震弹簧安装在第一支撑杆和第二支撑杆上;所述筛糠箱体的上端面一侧安装有进料斗,筛糠箱体的上端面另一侧安装有吸尘箱,吸尘箱的顶部贯通连接有风管的一端;风管的另一端与抽风机连接,吸尘箱上安装有风拉机构;筛糠箱体的一侧底部依次安装有第一出料管、第二出料管、第三出料管和第四出料管;筛糠箱体的一侧位于风拉机构和第一出料管之间开设有进风口;
所述筛糠箱体的中部通过螺栓安装有U型架,U型架上通过螺栓安装有底板,底板上通过螺丝固定安装有振动电机;
所述筛糠箱体的内部两侧侧壁由上至下依次对称设置有两个第一卡条、第二卡条和第三卡条;第一卡条、第二卡条和第三卡条上均开设有卡槽,两个第一卡条之间安装有第一筛板,且第一筛板的两侧分别卡接在两个第一卡条内部的卡槽内;两个第二卡条之间安装有第二筛板,且第二筛板的两侧分别卡接在两个第二卡条内部的卡槽内;两个第三卡条之间安装有第三筛板,且第三筛板的两侧分别卡接在两个第三卡条内部的卡槽内;第一筛板、第二筛板和第三筛板内均通过螺丝安装有筛网。
与现有技术相比,本发明的有益效果是:通过对风机的输出功率以及像素格糠数进行分析得到分析面积,将分析面积与风拉机构内的相对通孔面积进行比对,然后通过处理器对风拉机构进行控制调节,进而调节相对通孔面积,方便对糠原料中的灰尘进行吸附,避免风拉机构内的相对通孔面积过大或者过小,造成将糠吸附走或者糠原料中的灰尘吸附不完全。
附图说明
为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
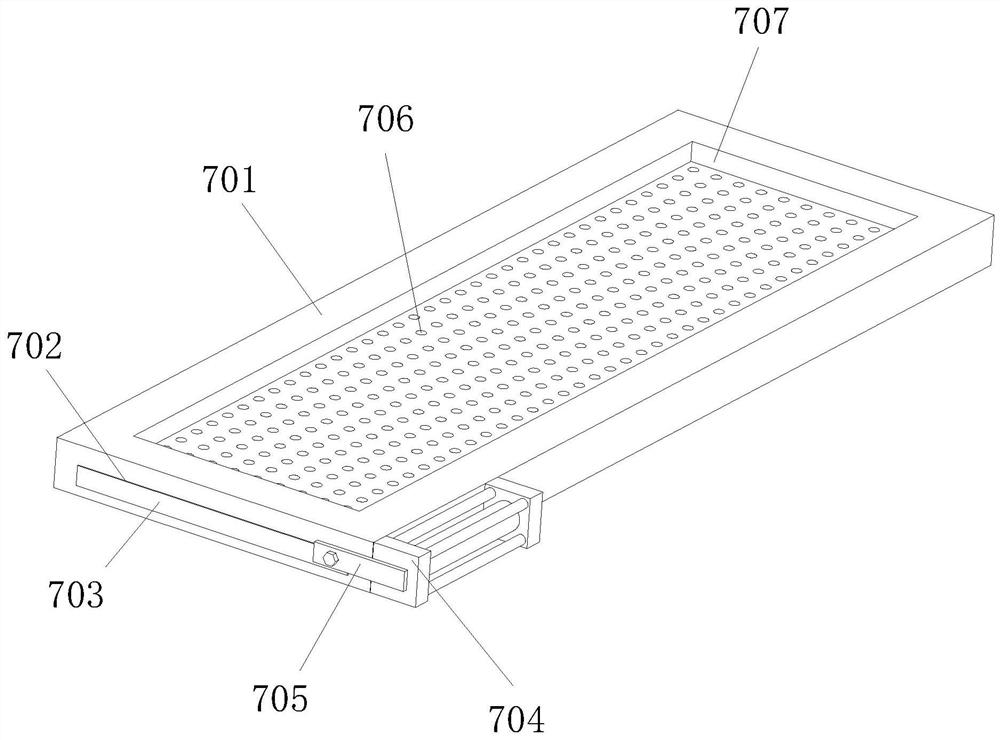
图1为本发明的风拉机构整体结构示意图;
图2为本发明的风拉机构整体结构爆炸图;
图3为本发明的原理框图;
图4为本发明的振动筛糠机整体机构图;
图5为本发明的振动筛糠机整体剖视图;
图6为本发明的减震弹簧安装示意图。
具体实施方式
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1-6所示,一种振动筛糠机去灰用可调节风拉机构,包括数据采集模块、处理器、数据存储模块、数据分析模块、风机和安装在振动筛糠机内部的风拉机构,
风拉机构包括挡板701,挡板701的内部开设有安装槽702,安装槽702的内部滑动安装有移动板703,移动板703的一端通过螺栓固定安装有连接条705,挡板701的一侧侧壁安装有气缸704,气缸704的活塞杆顶端通过焊接与连接条705固定连接;挡板701的上端面开设有与安装槽702贯通连接的矩形槽707,移动板703上均匀开设有若干个第一风孔706,安装槽702的底端面均匀开设有若干个与第一风孔706一一对应的第二风孔708。
风机通过管道与振动筛糠机的风管贯通连接,其中,风管的底端位于风拉机构的正上方,风机用于抽吸风拉机构下方糠原料中的灰尘并将其抽吸的灰尘输送至灰尘收集箱内;
数据采集模块用于采集灰尘收集箱内部的图片以及风机的输出功率和第二风孔708与第一风孔706在垂直方向上的相对通孔面积并将图片、输出功率和相对通孔面积发送至处理器;
处理器接收到图片、输出功率和相对通孔面积后将其发送至数据分析模块;数据分析模块对接收到图片、输出功率和相对通孔面积进行分析,具体分析步骤为:
步骤一:将接收到的图片放大若干倍形成像素格图片,对像素格图片中每个像素格进行颜色识别,当像素格中的颜色与糠的颜色相同时,像素格糠数增加一;
步骤二:将像素格糠数标记为K1;将风机的输出功率标记为K2;相对通孔面积标记为K3;
步骤三:将像素格糠数、输出功率进行归一化处理并取其数值,利用公式K=μ×[1/K1×b1+1/K2×b2-0.3987]获取得到分析面积K;其中,b1和b2均为预设面积换算系数;μ为校准系数,取值为0.93254;
步骤四:将分析面积与相对通孔面积进行比对,当分析面积等于相对通孔面积时,不进行操作;当分析面积大于相对通孔面积时,则生成增大指令,并利用公式ZD=K-K3×b3获取得到增长间距ZD;其中,b3为预设面积距离换算系数;数据分析模块将增大指令和增长间距ZD发送至处理器;当分析面积小于相对通孔面积时,则生成缩小指令,并利用公式SD=K3-K×b3获取得到缩减间距SD,数据分析模块将缩小指令和缩减间距SD发送至处理器;
处理器接收到增大指令和增长间距以及缩小指令和缩减间距后进行处理,具体处理过程为:当处理器接收到增大指令后,处理器控制气缸704工作,通并使得气缸704带动连接条705向靠近安装槽702的方向运动,且连接条705的运动距离等于增长间距ZD;
当处理器接收到缩小指令后,处理器控制气缸704工作,通并使得气缸704带动连接条705向远离安装槽702的方向运动,且连接条705的运动距离等于缩减间距SD。
振动筛糠机包括支架1和筛糠箱体2;支架1上分别设置有第一支撑杆12和第二支撑杆13,筛糠箱体2的底端面通过四个减震弹簧14安装在第一支撑杆12和第二支撑杆13上;筛糠箱体2的上端面一侧安装有进料斗21,筛糠箱体2的上端面另一侧安装有吸尘箱23,吸尘箱23的顶部贯通连接有风管231的一端;风管231的另一端与抽风机连接,吸尘箱23上安装有风拉机构;筛糠箱体2的一侧底部依次安装有第一出料管25、第二出料管26、第三出料管27和第四出料管28;筛糠箱体2的一侧位于风拉机构和第一出料管25之间开设有进风口29;
筛糠箱体2的中部通过螺栓安装有U型架22,U型架22上通过螺栓安装有底板221,底板221上通过螺丝固定安装有振动电机222;
筛糠箱体2的内部两侧侧壁由上至下依次对称设置有两个第一卡条31、第二卡条32和第三卡条33;第一卡条31、第二卡条32和第三卡条33上均开设有卡槽,两个第一卡条31之间安装有第一筛板311,且第一筛板311的两侧分别卡接在两个第一卡条31内部的卡槽内;两个第二卡条32之间安装有第二筛板321,且第二筛板321的两侧分别卡接在两个第二卡条32内部的卡槽内;两个第三卡条33之间安装有第三筛板331,且第三筛板331的两侧分别卡接在两个第三卡条33内部的卡槽内;第一筛板311、第二筛板321和第三筛板331内均通过螺丝安装有筛网;
本发明在使用时,数据分析模块对接收到图片、输出功率和相对通孔面积进行分析,将像素格糠数、输出功率进行归一化处理并取其数值,利用公式K=μ×[1/K1×b1+1/K2×b2-0.3987]获取得到分析面积K;将分析面积与相对通孔面积进行比对,当分析面积大于相对通孔面积时,则生成增大指令,并利用公式ZD=K-K3×b3获取得到增长间距ZD;其中,b3为预设面积距离换算系数;数据分析模块将增大指令和增长间距ZD发送至处理器;当分析面积小于相对通孔面积时,则生成缩小指令,并利用公式SD=K3-K×b3获取得到缩减间距SD,数据分析模块将缩小指令和缩减间距SD发送至处理器;处理器接收到增大指令和增长间距以及缩小指令和缩减间距后进行处理,具体处理过程为:当处理器接收到增大指令后,处理器控制气缸704工作,通并使得气缸704带动连接条705向靠近安装槽702的方向运动,且连接条705的运动距离等于增长间距ZD;当处理器接收到缩小指令后,处理器控制气缸704工作,通并使得气缸704带动连接条705向远离安装槽702的方向运动,且连接条705的运动距离等于缩减间距SD;通过对风机的输出功率以及像素格糠数进行分析得到分析面积,将分析面积与风拉机构内的相对通孔面积进行比对,然后通过处理器对风拉机构进行控制调节,进而调节相对通孔面积,方便对糠原料中的灰尘进行吸附,避免风拉机构内的相对通孔面积过大或者过小,造成将糠吸附走或者糠原料中的灰尘吸附不完全。
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。