一种最小化后验距离的传感器路径优化方法
文献发布时间:2023-06-19 09:36:59
技术领域
本发明属于单传感器单目标跟踪领域,具体涉及一种最小化后验距离的传感器路径优化方法,用于提升传感器获取测量精度,提高对监测空间中目标的跟踪质量,达到持续稳定且高效跟踪目标的效果。
背景技术
在单传感器单目标跟踪领域中,若跟踪环境为简单环境,且传感器获取测量形式为非线性测量(常见如测量目标与传感器之间的距离即测距、目标与传感器之间相对位置矢量与x轴正半轴夹角即测角等)时,常利用扩展卡尔曼滤波算法进行目标状态估计。然而,当传感器获取测量形式为测距、测角时,测量质量会受到传感器自身固有测量误差的影响。
在扩展卡尔曼滤波算法中,常假设传感器自身测量误差服从一定均值的高斯分布。当该高斯分布均值、误差协方差矩阵数值固定时,传感器自身测量误差对测量数据质量的影响程度大小便取决于目标与传感器之间相对位置状态。如何通过优化传感器运动路径,有效降低传感器自身测量误差对测量质量的影响程度,是本发明要解决的主要问题。
发明内容
本发明提出一种最小化后验距离的传感器路径优化方法,该方法采用扩展卡尔曼滤波方法进行目标状态估计,同时利用“最小化目标与传感器之间后验距离”准则进行传感器路径优化,通过缩小目标与传感器之间后验距离,降低传感器自身测量误差对非线性测量质量的影响,提升传感器获取非线性测量的质量,从而减小目标状态估计误差,提升目标状态估计性能。
附图说明:
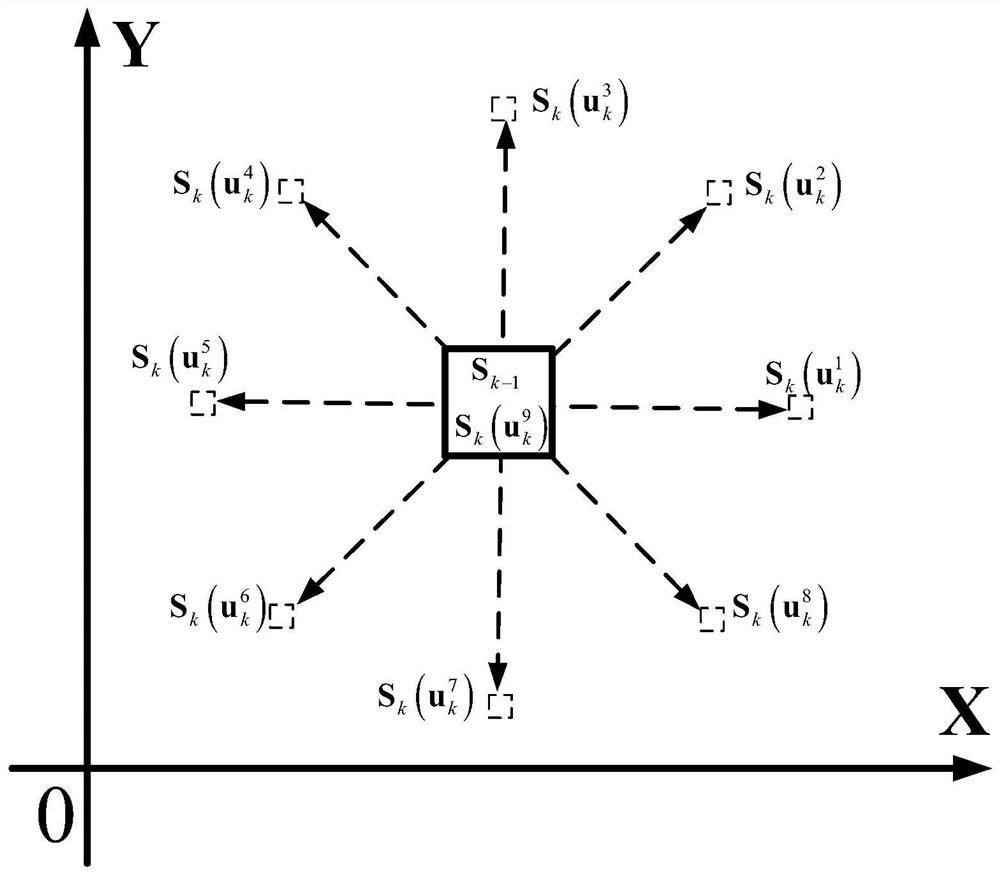
图1是传感器可选运动控制指令示意图;
图2是考虑了过程噪声的目标运动轨迹、某次仿真过程中传感器运动轨迹示意图;
图3是传感器路径优化前后获取的距离测量质量对比示意图;
图4是传感器路径优化前后获取的角度测量质量对比示意图;
图5是传感器路径优化前后目标位置状态估计误差示意图;
图6是传感器路径优化前后目标速度状态估计误差示意图。
具体实施方案:
以下结合技术方案和附图,详细叙述本发明的具体实施方式。
假设:1)传感器跟踪环境为简单环境,即跟踪环境中不存在任何干扰杂波,且传感器每一时刻仅能获取唯一目标测量信息;2)传感器在固定采样间隔内运动距离固定或为零,即传感器运动速度矢量模长固定或模长为零;3) 传感器运动航向角在[0~2π]区间内固定八等分,即传感器运动速度矢量可能与x轴正半轴分别成0、π/4、π/2、3π/4、π、5π/4、3π/2、7π/4夹角,因此每一时刻,传感器可选运动速度矢量共有九种情况:具体见图1。
结合上述假设,开始进行本发明实施步骤的描述:
(1)每一时刻,目标状态估计量服从高斯分布,即:
其中,
(2)在k时刻,进行目标状态估计时域预测:
P
其中,
(3)结合传感器k时刻所处位置S
(4)结合步骤(2)所得目标状态估计时域预测信息p(X
(5)利用虚拟测量信息
其中,
(6)结合k+1时刻传感器位置
(7)分别遍历各个传感器可选运动速度矢量
(8)利用“最小化目标后验状态与传感器之间距离”准则,选择最优传感器运动速度矢量:
(9)按照最优传感器运动速度矢量,传感器运动至指定位置
(10)重复步骤(1)~步骤(9),进行时域迭代计算,最终获取各个时刻目标状态估计信息。
算法仿真比较
传感器监测区域内仅一个进行近似匀速直线运动目标。传感器及目标初始位置、考虑了过程噪声的目标运动轨迹、单次仿真过程中传感器运动轨迹等见图2。以目标状态估计均方根误差(RMSE:Root Mean Square Error)作为性能指标。将本发明所提方法与“传感器位置固定”进行比较,共进行100次蒙特卡洛仿真实验。
100次蒙特卡洛实验下,距离、角度测量平均RMSE见图3、4,平均目标位置、速度状态估计RMSE见图5、6。
由图知:1)本发明所设计“最小化后验距离”的传感器路径优化方法基本有效,两者之间距离持续缩小;2)依据本发明所设计方法,在仿真过程中,传感器获取距离、角度测量质量不断提升;3)依据更高质量传感器观测数据,利用扩展卡尔曼滤波算法,最终所得目标动力学状态(包括目标位置、速度状态)估计精度有了显著提升。
- 一种最小化后验距离的传感器路径优化方法
- 一种转角与距离结合的旋翼无人机节能路径优化方法