北斗导航信号的相关、捕获方法及其设备
文献发布时间:2023-06-19 09:40:06
技术领域
本发明涉及信号捕捉处理领域,尤其涉及北斗导航信号的相关、捕获方法及其设备。
背景技术
信号捕获是导航系统的关键的信号处理过程,是定位和导航的前提。北斗卫星导航系统由空面段、地面段和用户段三部分组成,可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务。
现有的北斗导航信号捕捉跟踪在对北斗导航卫星信号进行捕捉跟踪时,一般是不会对其信号捕捉跟踪器进行移动的,其信号会受到地理位置和其他环境的影响,可移动式的信号捕捉器成功率会更高。
因此,有必要提供一种新的北斗导航信号的相关、捕获方法及其设备解决上述技术问题。
发明内容
为解决上述技术问题,本发明提供一种的北斗导航信号的相关、捕获方法及其设备。
本发明提供的北斗导航信号的相关、捕获方法包括:
a、对信号捕捉设备进行安置,并对信号捕捉设备中的控制器设定捕捉模块需要捕捉信号的参数,具体设定为待捕捉北斗导航卫星、非相干积分或差分合并的积累实践长度和参数估计对的数量;
b、信号捕捉设备中的捕获模块接受待捕捉北斗导航卫星的导航信号并对其进行处理,具体处理为对接收的导航信号进行相干积分运算,按照累计时间长度对相干积分结果进行非相干积分或差分合并,并输出相应的参数估计对给跟踪模块;
c、信号捕捉设备中的跟踪模块接收待捕捉北斗导航卫星的参数估计对,并通过控制器给跟踪模块跟踪待捕捉北斗导航卫星建立跟踪通道;
d、信号捕捉设备中的控制器判断待捕捉北斗导航卫星是否被跟踪成功,若未成功跟踪捕捉北斗导航卫星,则通过控制器增加累计时间长度及根据累计时间长度增加参数估计对数量或移动信号捕捉设备至最佳位置,重复对待捕捉北斗导航卫星信号重新捕捉,直至待捕捉北斗导航卫星跟踪成功。
北斗导航信号的相关、捕获方法的信号捕捉设备,包括:箱体、箱腔、箱盖、锁止万向轮和信号捕捉跟踪器,箱腔开设于箱体中并开口朝上设置,且两个箱盖对称转动连接于箱腔的开口处,两组锁止万向轮对称安装于箱体的下端,信号捕捉跟踪器安装于箱腔内;升降机构,用于控制信号捕捉跟踪器移进或者移出箱腔的升降机构安装于箱腔中;供电机构,用于对信号捕捉设备中的用电设备进行供电的供电机构安装于箱腔中;锁定机构,锁定机构安装于箱体上;限位机构,限位机构安装于箱腔中;顶出机构,顶出机构安装于箱腔中。
优选的,升降机构包括电机、内螺纹转筒、螺纹柱和升降板,电机固定安装于箱腔的下侧内壁上,且内螺纹转筒竖直固定安装于电机的输出端上,螺纹柱竖直插设于内螺纹转筒中并与其螺纹连接,升降板横向固定安装于螺纹柱的上端,且信号捕捉跟踪器安装于升降板的上端。
优选的,供电机构包括蓄电池、安装腔、安装板和光伏板,蓄电池安装于箱腔的下侧内壁上,安装腔开设于箱体的侧壁上,且安装板转动连接于安装腔中,光伏板固定安装于安装板靠近安装腔内侧的一侧侧壁上。
优选的,锁定机构包括滑槽、卡杆、弹簧、卡槽、条形开口和拉杆,滑槽竖直开设于箱体的侧壁中并与安装腔连通,且卡杆竖直滑动连接于滑槽中并通过弹簧与滑槽的上侧内壁连接,卡槽开设于安装板的侧壁中,且卡杆的下端插设于卡槽中,条形开口竖直开设于箱体的侧壁上并与滑槽连通设置,且拉杆与卡杆的侧壁固定连接并贯穿条形开口延伸至箱体外。
优选的,限位机构包括竖杆和套筒,两组竖杆对称竖直固定安装于升降板的下侧侧壁上,两组套筒对称固定安装于箱腔的下侧内壁上,且两组竖杆分别插设于两组套筒中。
优选的,顶出机构包括顶杆和弧形顶块,两组顶杆对称固定安装于升降板的上侧侧壁上,且两组弧形顶块分别固定安装于两组顶杆上。
优选的,两个箱盖相对的一侧侧壁上均固定安装有密封胶垫。
与相关技术相比较,本发明提供的北斗导航信号的相关、捕获方法及其设备具有如下有益效果:
1、本发明在根据一般的信号捕捉设备方法中增加移动信号捕捉设备来调整捕捉北斗导航卫星信号的最佳位置,提高了捕捉北斗导航信号的成功率;
2、本发明通过设置于箱体底部的锁止万向轮,使装置可移动,便于使用信号捕捉跟踪器对北斗导航卫星信号进行捕捉跟踪,箱体也对信号捕捉跟踪器进行保护,提高了其安全性能;
3、本发明通过设置说升降机构和顶出机构,使信号捕捉跟踪器上升并将箱盖顶开露出箱腔外,对北斗导航卫星信号进行捕捉跟踪,操作方便快捷;
4、本发明通过设置供电机构,通过蓄电池和光伏板对信号捕捉跟踪器和电机进行供电,主要是通过光伏板对其进行供电,在需要使用光伏板时,解除锁定机构对安装板的锁定,即可转动安装板,使光伏板处安装腔外进行光能发电,安全环保。
附图说明
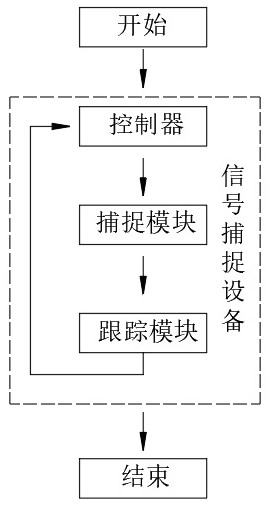
图1为本发明提供的北斗导航信号的相关、捕获方法的流程示意图;
图2为图1所示的信号捕捉设备的结构示意图;
图3为图1所示的信号捕捉设备的剖视结构示意图;
图4为图1所示的弧形顶块的结构示意图;
图5为图1所示的锁定机构的结构示意图。
图中标号:1、箱体,2、箱腔,3、箱盖,4、锁止万向轮,5、信号捕捉跟踪器,6、升降机构,61、电机,62、内螺纹转筒,63、螺纹柱,64、升降板,7、供电机构,71、蓄电池,72、安装腔,73、安装板,74、光伏板,8、锁定机构,81、滑槽,82、卡杆,83、弹簧,84、卡槽,85、条形开口,86、拉杆,9、限位机构,91、竖杆,92、套筒,9a、顶出机构,9a1、顶杆,9a2、弧形顶块,9b、密封胶垫。
具体实施方式
下面结合附图和实施方式对本发明作进一步说明。
请结合参阅图1、图2、图3、图4和图5,其中,图1为本发明提供的北斗导航信号的相关、捕获方法的流程示意图;图2为图1所示的信号捕捉设备的结构示意图;图3为图1所示的信号捕捉设备的剖视结构示意图;图4为图1所示的弧形顶块的结构示意图;图5为图1所示的锁定机构的结构示意图。北斗导航信号的相关信号捕捉设备包括:箱体1、箱腔2、箱盖3、锁止万向轮4、信号捕捉跟踪器5、升降机构6、供电机构7、锁定机构8、限位机构9、顶出机构9a和密封胶垫9b。
在具体实施过程中,如图1所示,北斗导航信号的相关、捕获方法:
a、对信号捕捉设备进行安置,并对信号捕捉设备中的控制器设定捕捉模块需要捕捉信号的参数,具体设定为待捕捉北斗导航卫星、非相干积分或差分合并的积累实践长度和参数估计对的数量;
b、信号捕捉设备中的捕获模块接受待捕捉北斗导航卫星的导航信号并对其进行处理,具体处理为对接收的导航信号进行相干积分运算,按照累计时间长度对相干积分结果进行非相干积分或差分合并,并输出相应的参数估计对给跟踪模块;
c、信号捕捉设备中的跟踪模块接收待捕捉北斗导航卫星的参数估计对,并通过控制器给跟踪模块跟踪待捕捉北斗导航卫星建立跟踪通道;
d、信号捕捉设备中的控制器判断待捕捉北斗导航卫星是否被跟踪成功,若未成功跟踪捕捉北斗导航卫星,则通过控制器增加累计时间长度及根据累计时间长度增加参数估计对数量或移动信号捕捉设备至最佳位置,重复对待捕捉北斗导航卫星信号重新捕捉,直至待捕捉北斗导航卫星跟踪成功;
需要说明的是:在设备捕捉不到信号时,通过移动设备来调整捕捉信号的最佳位置,提高了捕捉北斗导航信号的成功率。
参考图2和图3示,箱体1、箱腔2、箱盖3、锁止万向轮4和信号捕捉跟踪器5,箱腔2开设于箱体1中并开口朝上设置,且两个箱盖3对称转动连接于箱腔2的开口处,两组锁止万向轮4对称安装于箱体1的下端,信号捕捉跟踪器5安装于箱腔2内;
需要说明的是:通过设置于箱体1底部的锁止万向轮4,使装置可移动,便于使用信号捕捉跟踪器5对北斗导航卫星信号进行捕捉跟踪,箱体1也对信号捕捉跟踪器5进行保护,提高了其安全性能,本装置主要针对较小型的信号捕捉跟踪器5使用,其大型设备需要装在于车辆上移动。
参考图3示,用于控制信号捕捉跟踪器5移进或者移出箱腔2的升降机构6安装于箱腔2中,升降机构6包括电机61、内螺纹转筒62、螺纹柱63和升降板64,电机61固定安装于箱腔2的下侧内壁上,且内螺纹转筒62竖直固定安装于电机61的输出端上,螺纹柱63竖直插设于内螺纹转筒62中并与其螺纹连接,升降板64横向固定安装于螺纹柱63的上端,且信号捕捉跟踪器5安装于升降板64的上端;
需要说明的是:在需要将信号捕捉跟踪器5移出箱腔2时,电机61控制内螺纹转筒62转动,在限位机构9的限制下,使升降板64上升,配合顶出机构9a将箱盖3顶开,使信号捕捉跟踪器5露出箱腔2外,对北斗导航卫星信号进行捕捉跟踪。
参考图2、图3和图5示,用于对信号捕捉设备中的用电设备进行供电的供电机构7安装于箱腔2中,供电机构7包括蓄电池71、安装腔72、安装板73和光伏板74,蓄电池71安装于箱腔2的下侧内壁上,安装腔72开设于箱体1的侧壁上,且安装板73转动连接于安装腔72中,光伏板74固定安装于安装板73靠近安装腔72内侧的一侧侧壁上;
需要说明的是:通过蓄电池71和光伏板74对信号捕捉跟踪器5和电机61进行供电,主要是通过光伏板74对其进行供电,在需要使用光伏板74时,解除锁定机构8对安装板73的锁定,即可转动安装板73,使光伏板74处安装腔72外进行光能发电,安全环保,蓄电池71主要是在无光照情况下使用。
参考图3和图5示,锁定机构8安装于箱体1上,锁定机构8包括滑槽81、卡杆82、弹簧83、卡槽84、条形开口85和拉杆86,滑槽81竖直开设于箱体1的侧壁中并与安装腔72连通,且卡杆82竖直滑动连接于滑槽81中并通过弹簧83与滑槽81的上侧内壁连接,卡槽84开设于安装板73的侧壁中,且卡杆82的下端插设于卡槽84中,条形开口85竖直开设于箱体1的侧壁上并与滑槽81连通设置,且拉杆86与卡杆82的侧壁固定连接并贯穿条形开口85延伸至箱体1外;
需要说明的是:卡杆82在弹簧83的情弹性力作用下,卡杆82的下端卡在安装板73的卡槽84中,对安装板73进行锁定,在需要解除对安装板73的锁定时,向上滑动拉杆86,使拉杆86沿着条形开口85向上滑动,从而带动卡杆82对弹簧83进行挤压,同时卡杆83的下端脱离卡槽84,即可转动安装板73,将其转动至光伏板74接受阳光发电。
参考图3示,限位机构9安装于箱腔2中,限位机构9包括竖杆91和套筒92,两组竖杆91对称竖直固定安装于升降板64的下侧侧壁上,两组套筒92对称固定安装于箱腔2的下侧内壁上,且两组竖杆91分别插设于两组套筒92中;
需要说明的是:在升降板64升降过程中,竖杆91在套筒92中滑动,对升降板64进行限位,使升降板64不能转动而只能上下移动,两组四个竖杆91和套筒92的设置,提高了升降板64升降的稳定性。
参考图3和图4示,顶出机构9a安装于箱腔2中,顶出机构9a包括顶杆9a1和弧形顶块9a2,两组顶杆9a1对称固定安装于升降板64的上侧侧壁上,且两组弧形顶块9a2分别固定安装于两组顶杆9a1上;
需要说明的是:在升降板64向上移动过程中,顶杆9a1上的弧形顶块9a2会将箱盖3顶开,不需要工作人员手动打开箱盖3,使用方便。
参考图2示,两个箱盖3相对的一侧侧壁上均固定安装有密封胶垫9b;
需要说明的是:通过在箱盖3相对的一侧侧壁上安装密封胶垫9n,提高了箱盖3的密封性。
本发明提供的的工作原理如下:对信号捕捉设备进行安置,并对信号捕捉设备中的控制器设定捕捉模块需要捕捉信号的参数,具体设定为待捕捉北斗导航卫星、非相干积分或差分合并的积累实践长度和参数估计对的数量;信号捕捉设备中的捕获模块接受待捕捉北斗导航卫星的导航信号并对其进行处理,具体处理为对接收的导航信号进行相干积分运算,按照累计时间长度对相干积分结果进行非相干积分或差分合并,并输出相应的参数估计对给跟踪模块;信号捕捉设备中的跟踪模块接收待捕捉北斗导航卫星的参数估计对,并通过控制器给跟踪模块跟踪待捕捉北斗导航卫星建立跟踪通道;信号捕捉设备中的控制器判断待捕捉北斗导航卫星是否被跟踪成功,若未成功跟踪捕捉北斗导航卫星,则通过控制器增加累计时间长度及根据累计时间长度增加参数估计对数量或移动信号捕捉设备至最佳位置,重复对待捕捉北斗导航卫星信号重新捕捉,直至待捕捉北斗导航卫星跟踪成功;
其中在需要移动信号捕捉设备时,通过箱体1下端的锁止万向轮4对其进行移动,将其移动至捕捉跟踪北斗导航卫星信号的最佳位置,在使用信号捕捉跟踪器5过程中,电机61控制内螺纹转筒62转动,竖杆91在套筒92中滑动,对升降板64进行限位,使升降板64不能转动而只能上下移动,升降板64上升,顶杆9a1上的弧形顶块9a2会将箱盖3顶开,使信号捕捉跟踪器5露出箱腔2外,对北斗导航卫星信号进行捕捉跟踪,解除锁定机构8对安装板73的锁定,向上滑动拉杆86,使拉杆86沿着条形开口85向上滑动,从而带动卡杆82对弹簧83进行挤压,同时卡杆83的下端脱离卡槽84,即可转动安装板73,将其转动至光伏板74接受阳光发电,配合蓄电池71对信号捕捉跟踪器5和电机61进行供电。
本发明中涉及的电路以及控制均为现有技术,在此不进行过多赘述。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
- 北斗导航信号的相关、捕获方法及其设备
- 北斗导航信号的相关、捕获方法及其设备