一种多层无序物料的高精度快速视觉定位系统及方法
文献发布时间:2023-06-19 10:10:17
技术领域
本发明涉及领域,具体涉及一种多层无序物料的高精度快速视觉定位系统及方法。
背景技术
少批种物料通过物料托盘可以实现高精度定位,方便机械臂抓取实现自动化装配,但是针对多批种而且尺寸差异大的物料,再通过物料托盘实现精准定位,会增加人工在放置物料的时间成本和投产托盘的费用。
目前使用3D视觉技术可以实现对物料框里无序堆叠物料定位,但是定位精度较低。因此,提出一种多层无序物料的高精度快速视觉定位系统及方法。
发明内容
本发明所要解决的技术问题在于:如何解决现有3D视觉技术对无序堆叠物料定位存在的定位精度较低的问题,提供了一种多层无序物料的高精度快速视觉定位方法。
本发明是通过以下技术方案解决上述技术问题的,本发明包括以下步骤:
S1:获取粗定位圆心坐标
依次拉开各层物料托具,利用大视野相机拍摄后处理,匹配物料判别正反方向的特征,得到物料的正反信息,提取各层物料指定圆特征的粗定位圆心坐标;
S2:获取精定位特征点坐标
同时利用小视野相机依次拍摄各层物料指定圆特征,提取各层物料指定圆特征的精定位圆心坐标,并根据物料的几何关系,计算出物料表面吸附点的精定位坐标;
S3:转换点坐标关系信息
利用多项式拟合得到大视野与小视野中各层物料的点坐标关系,下一次装配时,使用大视野相机拍摄处理后,直接将各特征点的粗定位坐标信息转换成精定位坐标信息;
S4:装配物料
获取各特征点的精定位坐标信息后,根据产品装配需要逐层抓取所需物料后将其装配至产品中。
更进一步地,在所述步骤S1中,物料托具为并列纵置的多个物料抽屉。
更进一步地,在所述步骤S1中,在第一层物料托具到第N层物料托具中,大视野下物料指定圆特征的粗定位圆心坐标为(XN
更进一步地,在所述步骤S2中,组装时物料表面吸附点与机械臂连接,实现对物料的抓取。
更进一步地,在所述步骤S2中,从第一层物料托具到第N层物料托具中,小视野下物料指定圆特征的精定位圆心坐标为(X
更进一步地,在所述步骤S3中,点坐标关系转换公式如下:
X
Y
其中
X
Y
XN
YN
a
包括大视野视觉系统、小视野视觉系统、多层物料小车、机器臂、固定架,所述大视野视觉系统包括大视野相机,所述小视野视觉系统包括小视野相机,所述多层物料小车的内部纵向并列设置有多个物料抽屉,所述机器臂、所述大视野相机均与所述固定架连接,所述小视野相机设置在所述机器臂上,所述大视野相机、所述小视野相机均位于所述多层物料小车上方。
更进一步地,各所述物料抽屉内部均设置有防滑层。
更进一步地,通过所述机器臂控制各所述物料抽屉的开闭。
本发明相比现有技术具有以下优点:该多层无序物料的高精度快速视觉定位方法,通过设置两套2D视觉系统配合使用,具有高精度快速定位功能;多层物料小车的抽屉里共放置不同种类且尺寸差异大的物料,取料时机械臂拉开抽屉,大视野相机拍摄物料抽屉里的物料,然后处理后给出物料的正反信息和指定圆特征的圆心坐标信息,接着小视野相机再拍摄指定圆特征处理后给出更精确的圆心坐标信息,再根据物料的几何关系,得出表面的吸附点坐标信息;最后通过大视野与小视野提取的圆心坐标信息的转化,下一次再取相同层物料时,可以省去小视野拍摄过程,根据大视野拍摄处理结果直接转换,快速精准定位。
附图说明
图1是本发明实施例二中视觉定位系统的结构示意图;
图2是本发明实施例二中视觉定位方法在不同视野中坐标转化前的流程图;
图3是本发明实施例二中视觉定位方法在不同视野中坐标转化后的流程图;
图4是本发明实施例二中物料区的分层示意图;
图5是本发明实施例二中物料正反信息示意图;
图6是本发明实施例二中视觉定位方法实施案例示意图。
具体实施方式
下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
实施例一
本实施例提供一种技术方案:一种多层无序物料的高精度快速视觉定位方法,包括以下步骤:
S1:获取粗定位圆心坐标
依次拉开各层物料托具,利用大视野相机拍摄后处理,匹配物料判别正反方向的特征,得到物料的正反信息,提取各层物料指定圆特征的粗定位圆心坐标;
S2:获取精定位特征点坐标
同时利用小视野相机依次拍摄各层物料指定圆特征,提取各层物料指定圆特征的精定位圆心坐标,并根据物料的几何关系,计算出物料表面吸附点的精定位坐标;
S3:转换点坐标关系信息
利用多项式拟合得到大视野与小视野中各层物料的点坐标关系,下一次有装配需求时,使用大视野相机拍摄处理后,直接将各特征点的粗定位坐标信息转换成精定位坐标信息,省去小视野拍摄处理过程;
S4:装配物料
获取各特征点的精定位坐标信息后,根据产品装配需要逐层抓取所需物料后将其装配至产品中。
在所述步骤S1中,物料托具为并列纵置的多个物料抽屉。
在所述步骤S1中,从第一层物料托具到第N层物料托具中,大视野下物料指定圆特征的粗定位圆心坐标为(XN
在所述步骤S2中,组装时物料表面吸附点与机械臂连接,实现对物料的抓取。
在所述步骤S2中,从第一层物料托具到第N层物料托具中,小视野下物料指定圆特征的精定位圆心坐标为(X
在所述步骤S3中,点坐标关系转换公式如下:
X
Y
其中
X
Y
XN
YN
a
本实施例还提供了一种多层无序物料的高精度快速视觉定位方法,利用如上所述的高精度快速视觉定位方法进行物料的定位工作,方便抓取装配;
包括大视野视觉系统、小视野视觉系统、多层物料小车、机器臂、固定架,所述大视野视觉系统包括大视野相机,所述小视野视觉系统包括小视野相机,所述多层物料小车的内部纵向并列设置有多个物料抽屉,所述机器臂、所述大视野相机均与所述固定架连接,所述小视野相机设置在所述机器臂上,所述大视野相机、所述小视野相机均位于所述多层物料小车的上方。
各所述物料抽屉内部均设置有防滑层。
通过所述机器臂控制各所述物料抽屉的开闭。
实施例二
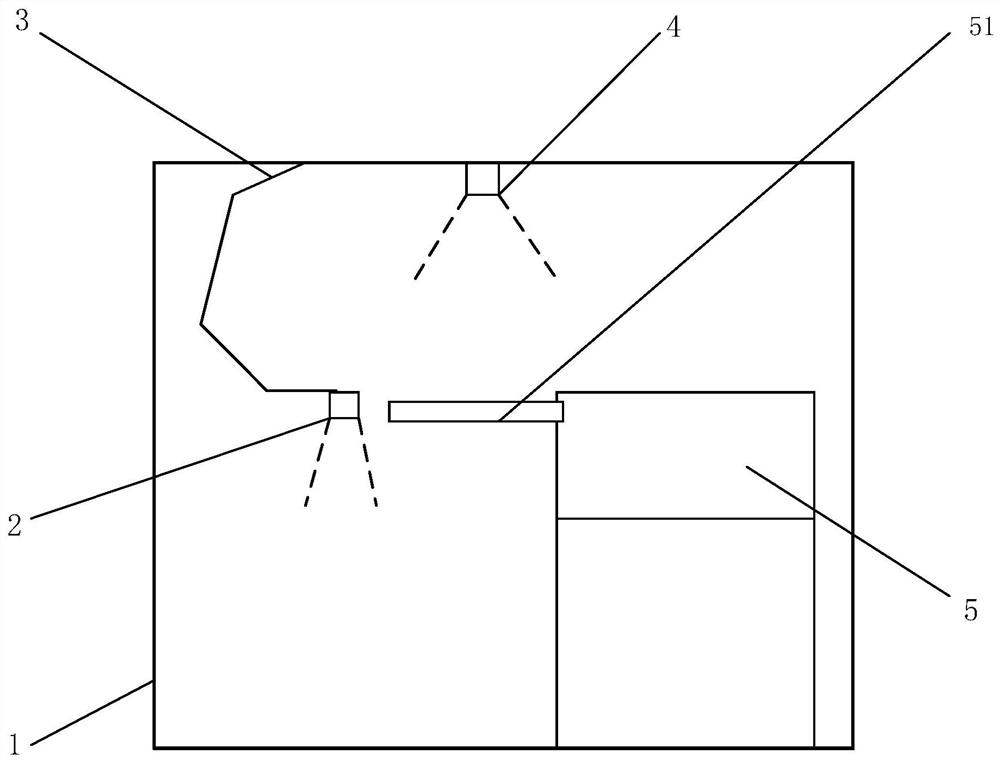
如图1所示,本实施例提供了一种多层无序物料高精度快速视觉定位系统,包括大视野视觉系统4、小视野视觉系统2、多层物料小车5、机器臂3、固定架1,所述大视野视觉系统4包括2000万像素相机、定焦镜头、双条形光源、光源控制器,大视野视觉系统4的2000万像素相机固定在多层物料小车5上方的固定架1上,起到大视野长景深拍摄作用;小视野视觉系统2包括2000万像素相机、远心镜头、环形光源、光源控制器,小视野视觉系统2的2000万像素相机固定在机械臂3上,起到小视野高精度拍摄作用,所述多层物料小车5的每层抽屉51里铺设一层橡胶,可以防止抽屉51在拉开与关上时物料与抽屉51发生相对运动,由于一层的物料不是一次使用完,抽屉51会存在多次被拉开和被关上,如果抽屉51里铺设的橡胶防止物料相对运动效果比较好,每一层物料的定位只需第一次抽屉51被拉开始时使用大视野相机拍摄一次即可,可以进一步提高定位的速度。
如图2~4所示,本实施例还提供了一种多层无序物料高精度快速视觉定位方法,主要包括以下内容:
使用时,所述大视野视觉系统2是固定在多层物料小车抽屉51拉开后的正上方,与最上层物料的工作距离大于1米,而且双条形光源安装位置离最上层物料的距离大于1米,可以避免对机械臂3的运动产生干涉。将多层物料分为最上层6、中间层7和最下层8,在调节大视野视觉系统2的相机与镜头参数时,使镜头的光圈调到最小,可以增加景深,以中间层7为依据,调节焦距使得中间层7的物料拍摄清晰,然后再拍摄不同层数,镜头的焦距不用调节。
在第一次物料定位时,以第一层为例,机械臂3将物料抽屉51拉开,使用大视野相机拍摄,根据规定的物料正反条件(大视野相机拍摄后得到整个物料抽屉的物料图像,然后将其中一个物料图像灰度处理后分割出来当成模板,再将这个模板里的正反特征分割出来当成二次模板,通过两次模板匹配和拟合处理可以得到正反特征的某点坐标,比如圆心坐标点4(正反特征和指定圆特征不一定是相同特征),如图5所示,当在视觉成像坐标系中,直线上所有点C坐标值相同且过圆心4的直线和正反特征所在的物料边形成的直线交于点5,圆心点4的R坐标值比点5的R坐标值大时,物料为正,否则为反,(直线上的所有点C坐标值相同且过圆心点4的直线和正反特征所在的物料边形成的直线平行时实际出现的概率比较小,可以不考虑)可以判断物料的正反,然后给出所有物料的含有指定圆特征区域圆心的坐标(X1
如果小视野相机可以拍摄两个圆特征区域,可以处理出另一圆特征区域圆心的坐标,结合指定圆心两个点确定物料的倾斜角度信息;如果小视野不能拍摄两个圆特征,可以先通过直线拟合拟合出三条直线,然后求其中一条直线与另外两条直线的交点,如图6中的点1、点3,然后再根据点1和点3求出中点点2,然后点2和点4(定位指定圆特征区域的圆心)构成直线,得出物料的倾斜信息。
装配完后关闭第一层物料抽屉51,打开第二层物料抽屉51,根据需要依次打开第N层物料抽屉51。在装下一个产品时,会再次打开第一层物料抽屉51,再使用小视野相机拍摄,处理后给出各圆特征区域圆心的坐标(X
X
Y
其中:X
Y
XN
YN
a
不同物料层下坐标关系表如下表1所示
表1、不同物料层下坐标关系表
当下一次有装配需求时,使用大视野相机拍摄处理后,可以直接将特征点(圆特征区域圆心、吸附点)的粗定位坐标信息转换成精定位坐标信息,省去小视野拍摄处理过程,可实现快速高精度定位。其他层与第一层工作原理类似。
如图6所示,大视野相机拍摄后得到整个物料抽屉的物料图像,然后将其中一个物料图像灰度处理后分割出来当成模板,再将这个模板里的指定圆特征区域分割出来当成二次模板,通过两次模板匹配可以得到待定位的物料的定位指定圆特征的圆心坐标(点4坐标)。
工作原理:多层物料小车5的抽屉51里共放置不同种类且尺寸差异大的物料,取料时,机械臂3拉开抽屉51,大视野相机拍摄处理后给出相应的点坐标信息,然后小视野相机再拍摄处理后给出更精确的点坐标信息,通过大视野与小视野坐标信息的转化,下一次再取相同层物料时,可以省去小视野拍摄过程,根据大视野拍摄处理结果直接转换,快速精准定位;如果抽屉51里铺设的橡胶防止物料相对运动效果比较好,每一层物料的定位只需第一次抽屉51被拉开始时使用大视野相机拍摄一次即可,可以进一步提高定位的速度。
综上所述,上述实施例的多层无序物料的高精度快速视觉定位系统及方法,通过设置两套2D视觉系统配合使用,具有高精度快速定位功能;多层物料小车的抽屉里共放置不同种类且尺寸差异大的物料,取料时机械臂拉开抽屉,大视野相机拍摄物料抽屉里的物料,然后处理后给出物料的正反信息和指定圆特征的圆心坐标信息,接着小视野相机再拍摄指定圆特征处理后给出更精确的圆心坐标信息,再根据物料的几何关系,得出表面的吸附点坐标信息;最后通过大视野与小视野提取的圆心坐标信息的转化,下一次再取相同层物料时,可以省去小视野拍摄过程,根据大视野拍摄处理结果直接转换,快速精准定位。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 一种多层无序物料的高精度快速视觉定位系统及方法
- 一种基于高精度三维地图的视觉定位系统及方法