一种基于ADRC的微机械陀螺幅值控制系统
文献发布时间:2023-06-19 10:38:35
技术领域
本发明涉及微机械陀螺技术领域,特别涉及一种基于ADRC的微机械陀螺幅值控制系统。
背景技术
微机械陀螺是惯性导航系统与惯性仪表的核心部件,在战略武器中占有及其重要的地位,且在战术武器中的应用也日益广泛,以陀螺为核心组成的各种系统和设备已被广泛用于航海,航空航天,陆地和兵器等导航领域。
现阶段微机械陀螺幅值控制系统中主要使用自动增益控制,该控制算法是基于PID控制方法的一种控制方法,该方法在控制幅值时由于比例系数的关系,会产生超调,超调与快速性不可兼得,若系统响应快则系统超调就会变大,若想要系统超调变小,那么系统的快速性将会降低。
发明内容
为了克服上述现有技术的不足,本发明的目的在于提供一种基于ADRC的微机械陀螺幅值控制系统,旨在提高微机械陀螺输出信号的幅值稳定性。
为了实现上述目的,本发明采用的技术方案是:
一种基于ADRC的微机械陀螺幅值控制系统,包括微机械陀螺,微机械陀螺分别通过频率控制回路和幅值控制回路控制,所述频率控制回路中使用锁相环为微机械陀螺提供正弦驱动信号,使陀螺做简谐振动;
所述幅值控制回路中使用自抗扰控制来稳定微机械陀螺输出信号的幅值;
两个回路皆采用闭环控制。
所述频率控制回路通过锁相环为微机械陀螺提供正弦驱动信号,所述锁相环回路包含鉴相器、环路滤波器和压控振荡器;
所述鉴相器用于判断微机械陀螺输出信号与输入信号的相位差;
环路滤波器根据鉴相器输出误差,输出控制电压,控制压控振荡器的输出频率;
压控振荡器为电压控制器件,根据输入电压的大小调整输出信号的频率。
所述微机械陀螺频率控制回路工作方式为:
第一步,压控振荡器产生一定范围内的驱动信号,使微机械陀螺进入谐振工作范围;
第二步,微机械陀螺的输出信号与压控振荡器的输出信号通过鉴相器,鉴相器输出两个信号的相位差信号,并将该信号输入至环路滤波器;
第三步,环路滤波器根据输入的误差信号,输出一个控制信号,调整压控振荡器的输出信号频率,以此往复,最终频率控制回路输出频率达到微机械陀螺的工作频率,使微机械陀螺工作在谐振频率。
所述幅值控制回路使用自抗扰控制来稳定微机械陀螺输出信号幅值,所述幅值控制回路中包含跟踪微分器、误差反馈控制模块和扩张状态观测器模块;
所述跟踪微分器事先安排过渡过程,提取含有随机噪声的输入信号及其微分信号,解决PID超调性、快速性之间的矛盾;
所述误差反馈控制模块根据反馈的误差信号输出控制信号使控制对象(微机械陀螺)工作在期望的状态;
所述扩张状态观测器模块用于估计系统内外扰动的实时作用值,并在反馈中给予补偿,用补偿的方法消除扰动的影响。
所述自抗扰控制具体算法如下:
跟踪微分器;
fh=fhan(x
x
x
其中:x
其中fhan为最速综合函数,其表达式为:
式中参数计算方法为:
a
y=x
a=(a
本例中取h
式中:r
所述扩张状态观测器模块具体算法为:
ε
z
其中:fal(x,a,δ)为非线性函数:
误差反馈控制:
e
e
u
u=(u
本例中取b
式中:z
本发明的有益效果:
本发明使用ADRC控制算法对微机械陀螺的输出幅值进行控制,所述跟踪微分器事先安排过渡过程,提取含有随机噪声的输入信号及其微分信号,解决PID超调性、快速性之间的矛盾;所述误差反馈控制模块根据反馈的误差信号输出控制信号使控制对象(微机械陀螺)工作在期望的状态;所述扩张状态观测器模块用于估计系统内外扰动的实时作用值,并在反馈中给予补偿,用补偿的方法消除扰动的影响。
附图说明
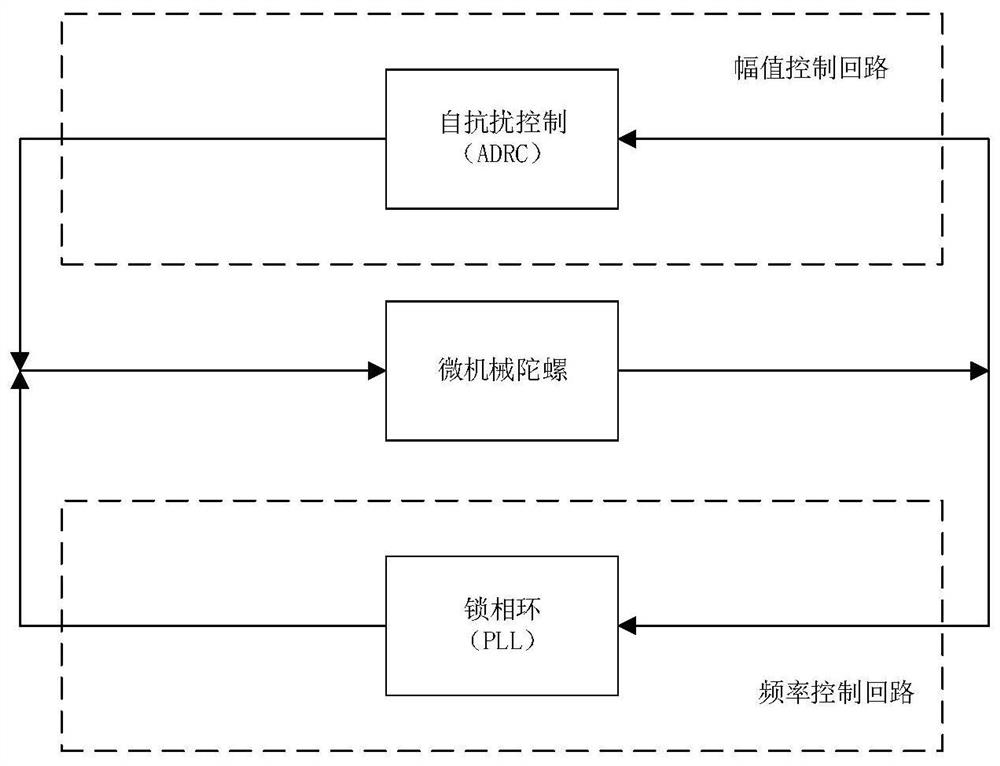
图1为基于ADRC的微机械陀螺驱动装置结构示意图。
图2为频率控制回路结构示意图。
图3为幅值控制回路结构示意图。
图4为跟踪微分器输入输出结果图。
图5为基于自动增益控制与自抗扰控制的幅值稳定系统仿真结果对比图。
具体实施方式
下面结合实施例对本发明作进一步详细说明。
在本实施例中,如图1所示中微机械陀螺是控制对象,频率控制回路中使用锁相环为微机械陀螺提供正弦驱动信号,使陀螺做简谐振动。幅值控制回路中使用自抗扰控制来稳定微机械陀螺输出信号的幅值。两个环路皆采用闭环控制。
在本实施例中,如图2所示中频率控制回路使用的是锁相环为微机械陀螺提供正弦驱动信号,其中锁相环回路包含:1、鉴相器,用于判断微机械陀螺输出信号与输入信号的相位差。2、环路滤波器,根据鉴相器输出误差,输出控制电压,控制压控振荡器的输出频率。3、压控振荡器,压控振荡器为电压控制器件,可根据输入电压的大小调整输出信号的频率。
本实施例中,假设微机械陀螺的工作频率为14000Hz(由于加工工艺的不成熟,环境影响,器件老化等因素,会导致微机械陀螺的工作频率有一定范围的波动)则频率控制回路工作方式为:第一步,压控振荡器产生14000±20Hz范围内的驱动信号,使微机械陀螺进入谐振工作范围。第二步,微机械陀螺的输出信号与压控振荡器的输出信号通过鉴相器,鉴相器输出两个信号的相位差信号,并将该信号输入至环路滤波器。第三步,环路滤波器根据输入的误差信号,输出一个控制信号,调整压控振荡器的输出信号频率。以此往复,最终频率控制回路输出频率达到微机械陀螺的工作频率,使微机械陀螺工作在谐振频率。
本实施例中,如图3中幅值控制回路使用自抗扰控制来稳定微机械陀螺输出信号幅值。幅值控制回路中包含:1、跟踪微分器,事先安排过渡过程,提取含有随机噪声的输入信号及其微分信号,解决PID超调性、快速性之间的矛盾。2、误差反馈控制模块,根据反馈的误差信号输出控制信号使控制对象(微机械陀螺)工作在期望的状态。3、扩张状态观测器模块,用于估计系统内外扰动的实时作用值,并在反馈中给予补偿,用补偿的方法消除扰动的影响,从而具有抗干扰的作用。
下面依次本实施例中自抗扰控制中各个模块的工作机理:
1、跟踪微分器(TD):事先安排过渡过程,提取含有随机噪声的输入信号及其微分信号,解决PID超调性、快速性之间的矛盾。
2、扩张状态观测器(ESO):估计系统内外扰动的实时作用值,并在反馈中给予补偿,用补偿的方法消除扰动的影响,从而具有抗干扰的作用。
3、误差反馈控制器:扰动抑制和消减:根据TD得出的给定信号和信号的微分,与ESO观测到的系统输出、输出导数的误差,进而进行控制和扰动补偿。
自抗扰控制具体算法如下:
1、跟踪微分器;
fh=fhan(x
x
x
其中:x
其中最速综合函数为:
其中:
a
y=x
a=(a
本实施例中参数取h
本实施例,图3所示为跟踪微分器输入输出仿真结果图,图3所示中:输入的阶跃信号,跟踪微分器将阶跃信号平缓化后得到的最终系统输入信号,三角形信号为其微分信号,由仿真结果可以看出跟踪微分器减少了信号大幅变化时导致的系统超调,将非常激烈的阶跃信号平缓化。
2、扩张状态观测器;
ε
z
其中:fal(x,a,δ)为非线性函数:
误差反馈控制:
e
e
u
u=(u
本实施例中参数取b
本实施例中,图5为基于自动增益控制与自抗扰控制的幅值稳定系统仿真结果对比图:图中阶跃信号为系统需要跟踪的阶跃信号曲线,有超调的曲线为传统自动增益控制曲线,无超调的曲线为基于自抗扰控制的输出曲线。从图中可得到:基于自抗扰控制(ADRC)的幅值稳定系统相比较传统自动增益控制控制系统来说,系统暂态时间更短,上升时间更短,超调量更少,所以自抗扰控制相比较传统自动增益控制来说在幅值控制中所得到的性能更好。
- 一种基于ADRC的微机械陀螺幅值控制系统
- 一种基于改进ADRC的飞轮储能机侧控制系统及方法