一种转动关节用减震器及其减震方法
文献发布时间:2023-06-19 11:08:20
技术领域
本发明涉及机器人减震技术领域,尤其涉及一种转动关节用减震器及其减震方法。
背景技术
目前,足式机器人在髋关节安装舵机驱动大腿,在髋关节安装舵机并通过带传动驱动小腿,机器人的运动姿态依靠舵机的高精度转矩控制,但是,足式机器人关节处无减振装置,在机器人运动过程中产生的振动和冲击作用力增加了舵机的运动负荷,限制了足式机器人的应用。
专利文件CN112141236A公开了一种带减震功能的轮足式机器人腿部系统,其设置了安装于轮足机构和小腿机构中间的弹簧减震系统,该减震系统与轮足机构共同配合:一方面有弹性的轮足机构抵消小部分冲击力,另一方面弹簧减震系统可以极大地削弱冲击力,但是其仅仅能够对沿腿部传递的冲击力进行减震,不能有效的对周向转动的关节进行减震。
专利文件CN207364172U公开了一种周向减震的减震器用衬套,通过在内外支撑套之间设置多个橡胶减震体,一方面,保证内外支撑套之间通过橡胶硫化的结合可靠性,另一方面,橡胶减震体之间相对独立,发生形变时互不影响,再一方面,橡胶减震体之间的间隙为橡胶减震体提供形变空间,进一步提高减震效果。然而橡胶减震体刚度较差,而且容易在某一角度上的冲击时,导致损坏。
发明内容
本发明的目的是提供一种转动关节用减震器及其减震方法,以解决上述存在的技术问题,从动连接部通过条形板簧直接连接在主动毂上,利用条形板簧对作用在从动连接部上的冲击力进行缓冲,减少转动过程中的主动毂及驱动舵机的动负荷,以助于提高舵机的使用寿命。
为实现上述目的,本发明提供了如下方案:提供一种转动关节用减震器,包括主动毂和从动连接部,所述主动毂通过至少一个能够沿所述主动毂周向弯曲的条形板簧与所述从动连接部相连接,当所述条形板簧设有多个时,各所述条形板簧沿所述主动毂周向等间隔设置。
优选的,所述从动连接部上沿周向均布有若干个固定块,相邻所述固定块之间形成容纳单个所述条形板簧的限位夹紧槽。
优选的,所述限位夹紧槽的一侧内壁与所述条形板簧之间设置有限位板簧,所述限位板簧的长度不大于所述条形板簧位于所述限位夹紧槽内的长度。
优选的,所述固定块朝向所述主动毂的一端呈锥形结构。
优选的,所述从动连接部呈套接在所述主动毂外周壁上的环形结构,且各所述条形板簧、所述固定块沿所述环形结构周向等间隔设置。
优选的,所述环形结构与所述主动毂共同围成环形密封腔,所述环形密封腔内填充有可包裹所述条形板簧的液压油。
优选的,各所述条形板簧将所述环形密封腔分隔成若干个分别容纳有所述液压油和对应的所述固定块的分腔。
优选的,所述主动毂与所述从动连接部之间形成容纳所述条形板簧的环形密封腔,所述环形密封腔内填充有可包裹所述条形板簧的液压油。
优选的,所述主动毂的外周壁上开设有若干个分别对应各所述条形板簧的固定槽,所述条形板簧靠近所述主动毂的一端插接在所述固定槽内。
还提供一种转动关节用减震器的减震方法,包括如下步骤:
S1、减震器安装:将主动毂套接在机器人髋关节的驱动舵机的输出端上,将从动连接部与机器人的腿部相连接;
S2、减震动作:当机器人足部受到冲击时,从动连接部带动固定块,固定块带动条形板簧和限位板簧发生变形,吸收振动和冲击能量,条形板簧和其两侧的固定块分别形成的空间容积发生变化,容积变小的腔内液压油通过固定块与主动毂之间的缝隙向容积变大的腔内流动,利用液压油对条形板簧和限位板簧产生阻尼、避免振荡;
S3、恢复动作:冲击结束后,条形板簧和限位板簧主动恢复原状,释放能量,液压油沿着固定块与主动毂之间的缝隙回流,利用液压油对条形板簧和限位板簧产生阻尼、避免振荡。
本发明相对于现有技术取得了以下技术效果:
第一、主动毂通过至少一个能够沿主动毂周向弯曲的条形板簧与从动连接部相连接,一方面,利用条形板簧能够沿周向弹性变形的特点,在从动连接部受到冲击时,条形板簧发生变形,吸收振动和冲击能量,另一方面,利用条形板簧刚度较大的特性,那么在主动毂正转或反转通过条形板簧带动从动连接部转动时,条形板簧变形较小,进而能够充分减少转动关节转动误差,当条形板簧设有多个时,各条形板簧沿主动毂周向等间隔设置,进一步保证了主动毂和从动连接部之间减震的均匀性。
第二、从动连接部上沿周向均布有若干个固定块,相邻固定块之间形成容纳单个条形板簧的限位夹紧槽,一方面,通过相邻固定块将条形板簧靠近从动连接部的一端夹紧,那么使得条形板簧的另一端为自由弯曲端,另一方面,通过固定块增加了条形板簧固定面,避免条形板簧的固定端过窄容易造成开裂等现象。
第三、固定块朝向主动毂的一端呈锥形结构,两相邻的锥形结构之间形成用于容纳条形板簧弯曲变形的空间,避免了条形板簧在未充分对冲击进行降震时,提前接触到固定块,进而保证了条形板簧形变的有效性。
第四、从动连接部呈套接在主动毂外周壁上的环形结构,且各条形板簧、固定块沿环形结构周向等间隔设置,进而保证了无论从动连接部受到沿其周向上任意角度的冲击,均能够保证对其进行均匀减震,保证了整个减震器周向减震的有效性。
第五、环形结构与主动毂共同围成环形密封腔,环形密封腔内填充有可包裹条形板簧的液压油,在条形板簧发生弯曲变形时,液压油在受到条形板簧变形的推动作用后,在环形密封腔内流动,进而对条形板簧的弯曲变形产生阻尼效果,减轻条形板簧的振荡。
第六、各条形板簧将环形密封腔分隔成若干个分别容纳有液压油和对应的固定块的分腔,那么条形板簧和其两侧的固定块分别形成的空间容积发生变化,容积变小的腔内液压油通过固定块与主动毂之间的缝隙向容积变大的腔内流动,利用液压油对条形板簧和限位板簧产生阻尼、避免振荡。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
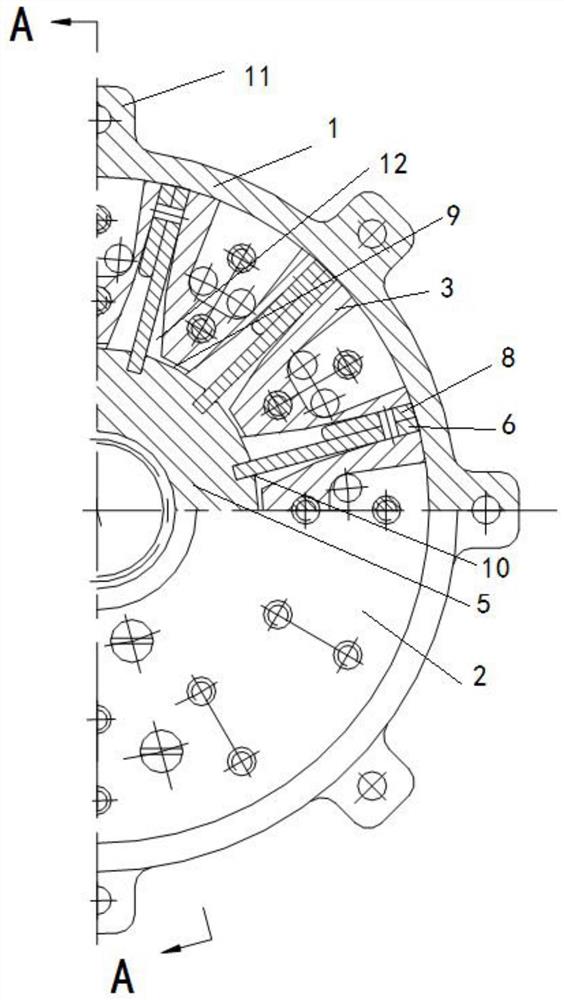
图1为本发明的正视半剖图;
图2为本发明的图1中A-A的剖视图;
其中,1-紧固连接盘、2-挡盘、3-固定块、4-密封圈、5-主动毂、6-条形板簧、7-连接销、8-限位板簧、9-缝隙、10-固定槽、11-连接耳、12-环形密封腔。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种转动关节用减震器及其减震方法,以解决上述存在的技术问题,从动连接部通过条形板簧直接连接在主动毂上,利用条形板簧对作用在从动连接部上的冲击力进行缓冲,减少转动过程中的主动毂及驱动舵机的动负荷,以助于提高舵机的使用寿命。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
请参考图1-2所示,本实施例提供一种转动关节用减震器,尤其涉及足式机器人在髋关节处的转动减震作用,包括主动毂5和从动连接部,其中当应用在机器人髋关节处时,主动毂5和从动连接部分别固定在机器人髋关节的固定部和活动部上,优选的在机器人髋关节处固定有驱动舵机,主动毂5套接在驱动舵机的驱动端上,从动连接部固定在腿部对应髋关节的位置处,或者将主动毂5和从动连接部应用在其他类似转动关节的机构上;主动毂5通过至少一个能够沿主动毂5周向弯曲的条形板簧6与从动连接部相连接,利用条形板簧6能够沿周向弹性变形的特点,在从动连接部受到冲击时,条形板簧6发生变形,吸收振动和冲击能量,并且利用条形板簧6刚度较大的特性,那么在主动毂5正转或反转通过条形板簧6带动从动连接部转动时,条形板簧6变形较小,进而能够充分减少转动关节转动误差,优选的当转动关节始终承受某一方向上的冲击力时,为降低材料的使用,可以采用单独一根条形板簧6,且条形板簧6的延伸方向与冲击力的方向相垂直,为保证减震效果,可以采用多根条形板簧6,当条形板簧6设有多个时,各条形板簧6沿主动毂5周向等间隔设置,进一步保证了主动毂5和从动连接部之间减震的均匀性。
如图1-2所示,从动连接部上沿周向均布有若干个固定块3,相邻固定块3之间形成容纳单个条形板簧6的限位夹紧槽,条形板簧6的一端夹紧在限位夹紧槽内,另一端延伸出限位夹紧槽并固定在主动毂5上,一方面,通过相邻固定块3将条形板簧6靠近从动连接部的一端夹紧,那么使得条形板簧6的另一端为自由弯曲端,另一方面,通过固定块3增加了条形板簧6固定面,避免条形板簧6的固定端过窄容易造成开裂等现象;优选的固定块3呈镂空状结构,以减轻减震器的自重。
作为本发明优选的实施方式,如图1-2所示,为能够适应双向传动关节结构或者单向传动关节结构,条形板簧6的弯曲可以为双向传动,即在限位夹紧槽内仅仅设置单独一根条形板簧6,那么条形板簧6可以朝两侧任意弯曲,或者限位夹紧槽的两侧内壁与条形板簧6之间对称设有若干长度短于条形板簧6的限位板簧8,构成等强梁结构,那么在主动毂正转或反转通过条形板簧带动从动连接部转动时,两侧的刚度都有显著的提高,能够在转动时抵御更大的振动和冲击;条形板簧6的弯曲还可以为单向传动,即在限位夹紧槽的一侧内壁与条形板簧6之间设置有限位板簧8,同样限位板簧8的长度短于条形板簧6,使得条形板簧6朝两侧的弯曲强度不同,优选的限位板簧沿主动毂正转的方向设置在条形板簧的前侧,那么在从动连接部反转压制条形板簧时,条形板簧受到限位板簧的支撑作用,能够抵御更大的振动和冲击。优选的限位板簧8和条形板簧6靠近从动连接部的端部相平齐,进而保证了条形板簧6靠近从动连接部的位置处整体刚度的一致性,限位板簧8通过连接销7紧贴固定在条形板簧6上,或者限位板簧8与条形板簧6一体成型,并整体形成靠近从动连接部的一端宽于靠近主动毂5的一端的结构。
如图1-2所示,固定块3朝向主动毂5延伸有延伸部,延伸部与固定块3之间形成台阶状结构,相邻两固定块3的延伸部之间形成用于容纳条形板簧6弯曲变形的空间,优选的,固定块3朝向主动毂5的一端呈锥形结构,两相邻的锥形结构之间形成用于容纳条形板簧6弯曲变形的空间,避免了条形板簧6在未充分对冲击进行降震时,提前接触到固定块3,进而保证了条形板簧6形变的有效性。
如图1-2所示,对于减震器始终受到单向冲击力或者某一角度内的冲击力时,从动连接部可以为扇形结构,各条形板簧6、固定块3沿扇形结构周向等间隔设置,既能够降低材料的应用,又能够保证整体的减震效果;对于减震器受到的冲击力沿周向上并不唯一,那么优选的,从动连接部呈套接在主动毂5外周壁上的环形结构,且各条形板簧6、固定块3沿环形结构周向等间隔设置,进而保证了无论从动连接部受到沿其周向上任意角度的冲击,均能够保证对其进行均匀减震,保证了整个减震器周向减震的有效性。
如图1-2所示,当从动连接部为环形结构时,环形结构与主动毂5共同围成环形密封腔12,环形密封腔12内填充有可包裹条形板簧6的液压油,或者采用其他类似液压油的、具有一定粘稠度的润滑油等,在条形板簧6发生弯曲变形时,液压油在受到条形板簧6变形的推动作用后,在环形密封腔12内流动,进而对条形板簧6的弯曲变形产生阻尼效果,减轻条形板簧6的振荡。
如图1-2所示,各条形板簧6将环形密封腔12分隔成若干个分别容纳有液压油和对应的固定块3的分腔,其中,条形板簧6上伸出限位夹紧槽且未连接主动毂5的部分的边缘紧贴环形密封腔12的内壁,同一分腔中,固定块3与两侧的条形板簧6之间分别形成能够随条形板簧6形变而变大或变小的容纳腔,而且固定块3环绕在主动毂5外周壁外侧,并与主动毂5之间形成连通两容纳腔且供液压油流通的缝隙9,同时增加限位板簧8的限制作用,整个减震器在减震的过程中,条形板簧6仅朝同一方向弯曲形变或恢复原始状,使得固定块3两侧的容纳腔在弯曲或恢复过程中,均能够一个容积变大,另一个容积变小,容积变小的容纳腔内液压油向容积变大的容纳腔内沿上述缝隙9流动,产生阻尼,减轻条形板簧6的振荡;优选的还可以通过优化两固定块3之间用于放置条形板簧6的间隙,以达到条形板簧6单向形变的目的,例如改变两侧对条形板簧6弯曲时的支点的位置,使得两侧在条形板簧6弯曲时的力臂长短不一,那么根据杠杆定理,条形板簧6更容易朝力臂较大的一侧弯曲;避免了同一固定块3两侧的容纳腔同时变大或变小,导致液压油的流动不均匀,容易造成未产生阻尼或者将液压油挤出减震器的现象。
进一步的,如图1-2所示,各条形板簧6的同一侧与对应的延伸部或锥形结构之间的距离相同,以保证同一固定块3两侧的容纳腔的变化尽可能相等,避免变化容积不同造成液压油压力过大或者不能够及时填充容纳腔的现象;优选的,条形板簧6沿周向与延伸部的侧壁之间,或者与锥形结构的侧壁之间的间隔相同,以保证液压油分布。
作为本发明另外优选的实施方式,如图1-2所示,主动毂5和从动连接部之间仅通过条形板簧6连接,进一步的,主动毂5与从动连接部之间形成容纳条形板簧6的环形密封腔12,环形密封腔12内填充有可包裹条形板簧6的液压油,在条形板簧6弯曲变形,实现减震器的减震效果时,液压油在条形板簧6周围的流动对条形板簧6的弯曲形成阻尼作用,减轻条形板簧6的振荡,优选的条形板簧6的未连接主动毂5和从动连接部的部分与环形密封腔12的内壁之间形成窄小的间隙,以减小液压油的流通路径,使得液压油对条形板簧6产生充分的阻尼效果。
如图1-2所示,为便于对条形板簧6的安装工作,主动毂5的外周壁上开设有若干个分别对应各条形板簧6的固定槽10,条形板簧6上靠近主动毂5的一端插接在固定槽10内,无需再采用螺栓或者焊接等连接方式,而且插接的方式避免条形板簧6与主动毂5的连接点过小,进而导致条形板簧6容易在弯曲形变的过程中与主动毂5出现断裂等现象,优选的固定槽10的深度与条形板簧6的形变程度相匹配,避免条形板簧6的形变程度过大时,其端部容易从固定槽10中脱出,导致减震器整体减震失效。
如图1-2所示,从动连接套可以设置为可拆卸的结构,便于对各个结构的组装和连接,从动连接套包括均呈环形结构的紧固连接盘1和挡盘2,紧固连接盘1的周向截面呈L形结构,挡盘2可拆卸且密封连接在L形结构的端壁上,并与L形结构形成开口朝向主动毂5的环形槽状结构,主动毂5的外周壁上沿径向朝外延伸有环形凸缘,环形凸缘密封插接在环形槽状结构中,并与环形槽状结构构成环形密封腔12,优选的,紧固连接盘1和挡盘2之间装有密封圈4,紧固连接盘1和主动毂5之间也装有密封圈4,挡盘2与紧固连接盘1之间、挡盘2与主动毂5之间也装有密封圈4,优选的紧固连接盘1的外圆周上设有若干个连接耳11。
还提供一种转动关节用减震器的减震方法,以将减震器安装在足式机器人上为例,包括如下步骤:
S1、减震器安装:将主动毂5套接在机器人髋关节的驱动舵机的输出端上,将从动连接部与机器人的腿部相连接;优选的从动连接部由紧固连接盘1和挡盘2连接而成时,紧固连接盘1通过连接耳11固定在腿的根部位置,机器人的腿部通过减震器连接在机器人髋关节的驱动舵机上,进而减轻了机器人野外奔跑过程中对腿部和驱动舵机的冲击,延长了机器人的使用寿命;
S2、减震动作:当机器人足部受到冲击时,从动连接部带动固定块3,固定块3带动条形板簧6和限位板簧8发生变形,吸收振动和冲击能量,条形板簧6和其两侧的固定块3分别形成的空间容积发生变化,使得容积空间内的压力改变,容积变小的腔内压力增大,容积变大的腔内压力减小,容积变小腔内的液压油通过固定块3与主动毂5之间的缝隙9向容积变大的腔内流动,利用液压油的流动对条形板簧6和限位板簧8产生阻尼、避免振荡;
S3、恢复动作:冲击结束后,条形板簧6和限位板簧8主动恢复原状,由受到冲击时发生弯曲变形的状态恢复到之前平直状态,进而释放能量,之前容积变小或变大的腔均恢复呈初始状态,液压油沿着固定块3与主动毂5之间的缝隙9回流,利用液压油的流动对条形板簧6和限位板簧8产生阻尼、避免振荡。
需要说明的是,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上,本说明书内容不应理解为对本发明的限制。
- 一种转动关节用减震器及其减震方法
- 一种转动关节用减震器