一种基于蓝牙的GPS移动式机器人定位系统
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及控制系统,具体涉及一种基于蓝牙的GPS移动式机器人定位系统。
背景技术
不同于传统的工业机器人(机械臂等),移动机器人具有特殊的结构模型以及应用领域,移动机器人是指能够在室内、室外、以及复杂的路况情况自主运动的移动智能系统,是一种将周边环境检测、实时状态规划导航、运动控制以等多项功能集于一体的移动智能系统。在这块领域的研究内容涉及到图像实时处理、计算机视觉、传感器技术、自动控制原理,机械工程等多学科理论,体现了当代科学和人工智能技术的最新成果。
如今,随着研究机器人的不断深入、应用领域更加广泛,所面临的环境和任务也越来越复杂。就目前的发展情况来看,移动机器人将会在未来有更广泛的应用。
例如在探测领域,对危险环境或人力不方便触及的地域进行数据采集探测时,现有技术中的移动机器人定位系统复杂,成本较高。
发明内容
本发明的目的是提供一种基于蓝牙的GPS移动式机器人定位系统,可以解决上述技术问题中的一个或是多个。
为了达到上述目的,本发明提出的技术方案如下:
一种基于蓝牙的GPS移动式机器人定位系统,包括移动机器人、蓝牙模块、GPS模块、控制器、电机驱动模块、移动控制端、显示模块。
所述蓝牙模块、所述GPS模块、所述控制器、所述电机驱动模块、所述显示模块分别安装在所述移动机器人底盘上;
所述蓝牙模块用于使所述移动控制端和所述移动机器人之间建立通信连接;
所述GPS模块用于所述移动机器人的定位,并将定位信息发送到所述控制器;
所述控制器通过所述蓝牙模块将定位信息发送到所述移动控制端;
所述移动控制端通过所述蓝牙模块控制所述电机驱动模块驱动所述移动机器人到达指定位置;
所述显示模块用于显示所述移动机器人状态。
进一步的:所述移动控制端是手机、平板电脑、笔记本电脑。
进一步的:所述电机模块的型号是l298n,所述电机驱动模块至少为两个;每一所述电机驱动模块对应控制一台电机。
进一步的:所述控制器是stc89c52rc。
进一步的:所述蓝牙模块为hc-05。
进一步的:所述GPS是atgm336h。
进一步的:所述定位信息是经纬度信息以及所述对应的时间信息。
进一步的:所述移动机器人包括底盘、两台电机、四个迈克纳姆轮,每一台电机对应控制两个迈克纳姆轮。
进一步的:所述移动控制端控制所述移动机器人做包括如下运动:前进、后退、原地左转、原地右转。
本发明的技术效果是:
本发明中通过蓝牙实现了对移动机器人对控制,并且通过GPS实现了经纬度和对应时间的信息,定位信息通过经纬度和时间使得定位信息唯一,定位准确;令移动机器人不会迷失方向,也更便于后期路线的规划,通过蓝牙的信息交互成本更低廉。
附图说明
构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
在附图中:
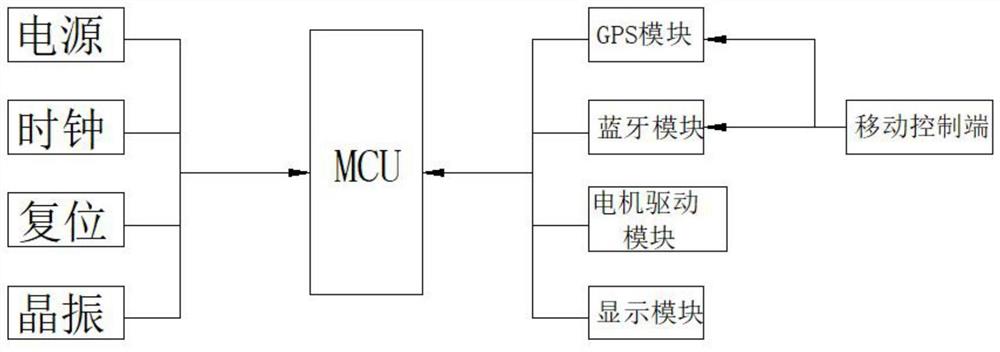
图1是本发明的控制结构示意图。
具体实施方式
下面将结合附图以及具体实施例来详细说明本发明,其中的示意性实施例以及说明仅用来解释本发明,但并不作为对本发明的不当限定。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施方式例如能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
为了便于描述,在这里可以使用空间相对术语,如“在……之上”、“在……上方”、“在……上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在……上方”可以包括“在……上方”和“在……下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
一种基于蓝牙的GPS移动式机器人定位系统,包括移动机器人、蓝牙模块、GPS模块、控制器、电机驱动模块、移动控制端、显示模块。
所述蓝牙模块、所述GPS模块、所述控制器、所述电机驱动模块、所述显示模块分别安装在所述移动机器人底盘上;
所述蓝牙模块用于使所述移动控制端和所述移动机器人之间建立通信连接;
所述GPS模块用于所述移动机器人的定位,并将定位信息发送到所述控制器;
所述控制器通过所述蓝牙模块将定位信息发送到所述移动控制端;
所述移动控制端通过所述蓝牙模块控制所述电机驱动模块驱动所述移动机器人到达指定位置;
所述显示模块用于显示所述移动机器人状态。
在本发明中通过蓝牙实现移动控制端和移动机器人之间的通信交互,蓝牙成本低,连接信号好。
通过GPS模块实现经纬度的确认,同时配合时间维度,让移动机器人的位置信息唯一;定位更准确,利于使用者在环境糟糕的情况下使用。
本定位装置适用于移动机器人在探测领域使用,例如探测路况或是其他,不做限定。
在本发明中,移动机器人可以携带任意检测和/或搬运组件,例如红外激光传感器、摄像头、气体检测装置,千斤顶等等,使移动机器人用于探测或是搬运领域,在此不做限定。
进一步的:所述移动控制端是手机、平板电脑、笔记本电脑。或是其他移动端,例如PSP,在此不做限定。
进一步的:所述电机模块的型号是l298n,所述电机驱动模块至少为两个;每一所述电机驱动模块对应控制一台电机。通过pwm占空比控制电机转速,电机正反转控制左右,正反转即信号01对调,一个移动式机器人需要两个电机,四个轮子;在此基础上,根据移动及机器人的需求可以增加控制模块和电机的对应数量。
进一步的:所述控制器是stc89c52rc。
进一步的:所述蓝牙模块为hc-05。
进一步的:所述GPS是atgm336h。
上述型号都是市面上可以购买到的型号,在使用过程中,成本低廉,使用方便。
进一步的:所述定位信息是经纬度信息以及所述对应的时间信息。让定位信息唯一,定位准确。
进一步的:所述移动机器人包括底盘、两台电机、四个迈克纳姆轮,每一台电机对应控制两个迈克纳姆轮。
进一步的:所述移动控制端控制所述移动机器人做包括如下运动:前进、后退、原地左转、原地右转。
迈克纳姆轮通过协调可以实现全方位的移动,其依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。
实施例一
如图1所示,在图1中移动控制端是手机。一种基于蓝牙的GPS移动式机器人定位系统,包括移动机器人、蓝牙模块、GPS模块、控制器、电机驱动模块、移动控制端、显示模块。
所述蓝牙模块、所述GPS模块、所述控制器、所述电机驱动模块、所述显示模块分别安装在所述移动机器人底盘上;所述移动机器人包括底盘、两台电机、四个迈克纳姆轮,每一台电机对应控制两个迈克纳姆轮。
所述蓝牙模块用于使所述移动控制端和所述移动机器人之间建立通信连接;所述蓝牙模块为hc-05。
所述GPS模块用于所述移动机器人的定位,所述GPS是atgm336h。所述定位信息是经纬度信息以及所述对应的时间信息。并将定位信息发送到所述控制器;所述控制器是stc89c52rc。
所述控制器通过所述蓝牙模块将定位信息发送到所述移动控制端;所述移动控制端是手机、在手机上安装APP,用于控制移动机器人。所述移动控制端控制所述移动机器人做包括如下运动:前进、后退、原地左转、原地右转。
所述移动控制端通过所述蓝牙模块控制所述电机驱动模块驱动所述移动机器人到达指定位置;所述电机模块的型号是l298n,所述电机驱动模块至少为两个;每一所述电机驱动模块对应控制一台电机。所述显示模块用于显示所述移动机器人状态,例如位置信息、电量情况等。
在本实施例中,将手机作为移动控制端,使用更灵活,对于每一个移动机器人的使用者只需要下载特定APP就可以实现对移动机器人的使用,使用范围更广泛。
实施例二
如图1所示,在图1中移动控制端是笔记本电脑。一种基于蓝牙的GPS移动式机器人定位系统,包括移动机器人、蓝牙模块、GPS模块、控制器、电机驱动模块、移动控制端、显示模块。
所述蓝牙模块、所述GPS模块、所述控制器、所述电机驱动模块、所述显示模块分别安装在所述移动机器人底盘上;所述移动机器人包括底盘、两台电机、四个迈克纳姆轮,每一台电机对应控制两个迈克纳姆轮。
所述蓝牙模块用于使所述移动控制端和所述移动机器人之间建立通信连接;所述蓝牙模块为hc-05。
所述GPS模块用于所述移动机器人的定位,所述GPS是atgm336h。所述定位信息是经纬度信息以及所述对应的时间信息。并将定位信息发送到所述控制器;所述控制器是stc89c52rc。
所述控制器通过所述蓝牙模块将定位信息发送到所述移动控制端;所述移动控制端是笔记本电脑上安装APP,用于控制移动机器人。所述移动控制端控制所述移动机器人做包括如下运动:前进、后退、原地左转、原地右转。
所述移动控制端通过所述蓝牙模块控制所述电机驱动模块驱动所述移动机器人到达指定位置;所述电机模块的型号是l298n,所述电机驱动模块为两个;每一所述电机驱动模块对应控制一台电机。所述显示模块用于显示所述移动机器人状态,例如位置信息、通信状况、电量情况等。
在本实施例中,移动控制端是笔记本电脑;这样可以保证使用的安全性,避免无序使用而造成移动机器人损坏,便于责任划分。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于蓝牙的GPS移动式机器人定位系统
- 一种机器人基于ROS和GPS的室内外无缝定位方法和定位系统