一种小型自主洗地机器人及其控制系统
文献发布时间:2023-06-19 11:39:06
技术领域
本发明属于小型智能机器人技术领域,具体涉及一种小型自主洗地机器人及其控制系统。
背景技术
我国正进入人口老龄化的困境,物业保洁面临劳动力市场紧缺、用人成本持续增高的窘境,而商用洗地机器人的问世可以大大降低企业及相关单位的保洁费用,目前的洗地机器人在洗地时,一般是由洗地机器人喷出清水、由盘刷旋转清洁地面,同时由后侧吸水趴将污水再吸入洗地机器人内进行存储,洗地工作完成后由保洁人员通过手动进行污水排放和加水,而目前由于保洁人员人手不够,常常洗地机器人工作后不能及时进行排污和加水,导致现有的洗地机器人工作效率不高。
同时现有的商用机器人体积较大,无法完全满足在小场景场合如医院、商场、办公楼、工厂车间等某些区域的使用需求。
发明内容
为了解决上述问题,本发明提供了一种小型自主洗地机器人,提高洗地机器人的自主性和工作效率,降低劳动成本。
为此,本发明的技术方案为:
一种小型自主洗地机器人,包括机体、用于洗地的盘刷、设置在盘刷后方用于吸污水的吸水趴、驱动机体行走和转向的底盘驱动系统,其特征在于,还包括:可对地面喷洒水的加排水系统、对污水净化以循环使用的污水循环过滤系统,以及,控制系统,所述控制系统与各系统通讯连接;
所述的污水循环过滤系统包括设置在机体上的污水箱与清水箱,污水箱内设置有用于对污水初次过滤的污水一次滤芯,污水箱内还设置有再次过滤污水并将过滤的污水吸至清水箱的滤泵;清水箱内设置有对污水再次净化的循环过滤滤芯;
所述污水箱回收的污水经过污水一次滤芯、滤泵过滤回收后补充至清水箱内,经清水箱内的循环过滤滤芯过滤后循环使用。
进一步地,所述污水箱内还设置有用于检测液位状态是否到达污水上限位的污水液位上限浮球开关;所述循环过滤滤芯依次包括:循环过滤一级滤芯和循环过滤二级滤芯。
进一步地,所述加排水系统包括:可对清水箱进行注水的注水管、对由注水管注入的水进行过滤的清水滤芯,以及,用于检测清水箱内上、下限水位的浮球开关。
进一步地,还包括自主排污系统,所述自主排污系统包括:排污滤芯、排污增压泵以及排污管,污水箱内的污水经排污滤芯过滤后,由排污增压泵增压后由排污管排出,还包括检测污水液位是否达到排污条件的排污电动球阀。
进一步地,所述的底盘驱动系统包括:位于行进方向前方的万向轮、位于行进方向前方且呈左右分布的驱动轮,所述驱动轮由轮毂电机差速驱动。
进一步地,所述盘刷具有两只,沿底盘中线对称地分布;所述盘刷可在盘刷升降机构的驱动下升降;所述吸水趴为可左右摆动的弧形结构,吸水趴可在吸水趴升降机构的驱动下升降。
进一步地,还包括:用于定位的电子码视觉导航、用于提供通讯连接信号的WIFI模块与4G路由、用于测量小型自主洗地机器人的空间坐标及加速度的IMU、用于近距离时精确定位导航的二维码相机、以及用于对路径进行扫描以规避或绕开路障的超声波传感器,所述的WIFI模块、4G路由、IMU及二维码相机与工控机通讯连接,所述超声波传感器与嵌入式主板通讯连接。
进一步地,还包括安全避障系统;所述的避障系统包括:用于采集清扫区域图像的激光模块、设置于机体上以探测障碍物的超声波传感器、以及电子防撞条。
本发明的另一方面,还提供一种小型自主洗地机器人控制系统,其特征在于,包括:进行激光扫描以获取清扫区域图像的激光模块、与激光模块进行通讯传输的工控机、根据工控机输出的信息进行操作控制的嵌入式主板、与嵌入式主板连接的多个驱动部件、以及,由驱动部件驱动的多个执行部件,执行部件动作,可使小型自主洗地机器人执行行走、清洗、自主充电、自主加水、自主排污的操作。
进一步地,还包括:用于定位的电子码视觉导航、用于提供通讯连接信号的WIFI模块与4G路由、用于测量小型自主洗地机器人的空间坐标及加速度的IMU、用于近距离时精确定位导航的二维码相机、以及用于对路径进行扫描以规避或绕开路障的超声波传感器,所述的WIFI模块、4G路由、IMU及二维码相机与工控机通讯连接,所述超声波传感器与嵌入式主板通讯连接。
与现有技术相比,本发明的有益效果体现在:
本发明的小型自主洗地机器人及其控制系统,可实现自主导航、自主加水、自主排污、自主充电等操作,提高了机器人的自主性,减少了人工干预成本;另一方面,使污水经过污水过滤循环过滤系统后再次作为清水循环使用,从而减少了保洁人员的及时排污及加水工作,提升了洗地效率;特别是在医院等人员密集场所,大大降低了保洁人员感染传染性疾病的风险。
与大型洗地机器人相比,本发明的小型自主洗地机器人因体积小噪音低自动化程度高等优势,所以可广泛地应用于医院、商场、办公楼、工厂车间等工作场景比较小的场合,从而大大节约了人力成本。
本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
图1为本发明小型自主洗地机器人的结构示意图;
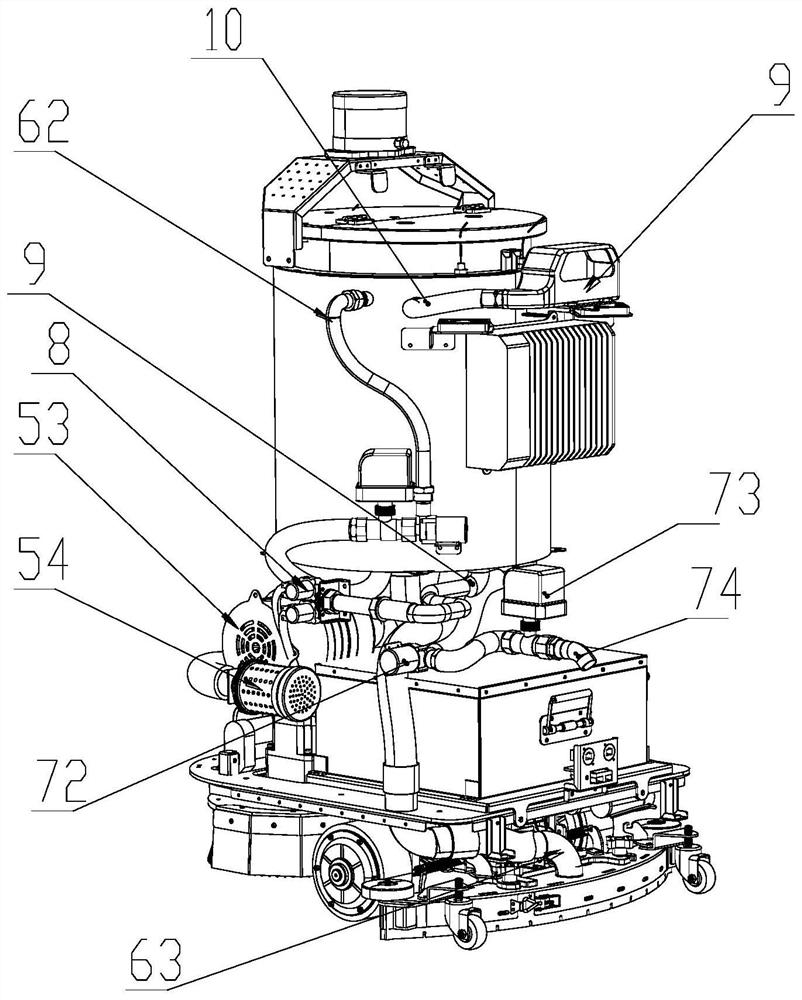
图2为本发明小型自主洗地机器人另一视角的结构示意图;
图3为图2中的细节放大图;
图4为设置于小型自主洗地机器人机体上部的污水箱与清水箱;
图5为小型自主洗地机器人的控制系统的结构示意图。
其中,1为盘刷、2为吸水趴、3为污水箱、4为清水箱、8为洒水阀、9为清水洒水管、10为注水管、11为右轮毂电机、12为注水口、13为万向轮、14为急停按钮、15为循环过滤一级滤芯、16为循环过滤二级滤芯、32为清水滤芯、51为污水一次滤芯、52为污水吸水管、53为风机、54为吸水电机、55为污水抽气管、56为吸污管、61为第一污水循环过滤连接管、62为第二污水循环过滤连接管、63为吸水趴水管、71为排污管、72为排污增压泵、73为排污电动球阀、74为排污口、75为排污滤芯。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。本发明中,SLAM是同步定位与地图构建(Simultaneous Localization And Mapping)的缩写。
实施例1
如图1~图4所示,是本发明小型自主洗地机器人的结构示意图。
本发明的一种小型自主洗地机器人,包括机体,还包括用于洗地的盘刷1、设置在盘刷1后方吸污水的吸水趴2、驱动机体行走和转向的底盘驱动系统,还包括对水箱补水并对地面喷洒水的加排水系统、对污水净化以便循环使用的污水循环过滤系统和控制系统,控制系统与其他各系统通讯连接。
如图1~图4所示,本无人洗地机器人采用双水箱设计,即清水箱4和污水箱3设计,容量均为25L,水箱箱体均采用不锈钢焊接制作。如图1~图4所示,本发明中,污水循环过滤系统包括设置在机体上的双水箱,即污水箱3与清水箱4;具体地,污水箱3内设置有用于对污水初次过滤的污水一次滤芯51,污水箱3内还设置有再次过滤污水并将过滤的污水吸至清水箱4的滤泵,另外污水箱3内还设置有排污滤芯75、污水液位浮球开关、循环过滤液位浮球开关等;污水箱3起始端的吸污管56为不锈钢管。清水箱4内设置有专对清水进行过滤的清水滤芯32及用于检测液位状态是否加满的清水液位浮球开关、专对污水进行过滤的循环过滤滤芯;循环过滤滤芯包括:循环过滤一级滤芯15和用于再次过滤的循环过滤二级滤芯16。图4为本小型自主洗地机器人的顶盖打开后机体上部的污水箱与清水箱的示意图。
如图1~图4所示,本发明中,污水箱3回收的污水,由污水箱3流出,经过污水一次滤芯51、并流经第一污水循环过滤连接管61、再流至滤泵、过滤电动球阀、流经第二污水循环过滤连接管62过滤回收后补充至清水箱4内,经清水箱4内的循环过滤一级滤芯15、循环过滤二级滤芯16的过滤后,再进一步循环使用。
如图1~图4所示,小型自主洗地机器人还包括自主加排水系统,自主加排水系统包括能自助加水至清水箱4内的注水管10,还包括清水滤芯32、清水液位浮球开关和用于检测液位状态是否到达下限位的清水液位下限浮球开关。如图1~图4所示,本小型自主洗地机器人可通过自主加排水系统对注水口12进行加水,从而完成自主加水及排污等动作。
自主加排水系统的具体操作如下:经过自主注水管10把水引流到清水箱4中,通过检测清水箱4中的清水箱4液位浮球开关状态来判断是否加满清水;所述的清水滤芯32用于对自助加水进行过滤。
如图1~图4所示,本小型自主洗地机器人还包括自主排污系统,所述的自主排污系统包括用于输送污水的排污管71,排污管71的末端设置有排污口74;自主排污系统还包括与污水箱3连通的排污滤芯75、与排污滤芯75相连的排污增压泵72、设置于排污管71上用于检测污水液位状态是否符合排污条件并进行排污的排污电动球阀73。排污增压泵72用于吸附污水,污水箱3内设置有污水液位上限浮球开关,用于检测液位状态是否到达污水上限位。具体地,污水箱3中排污滤芯75通过排污管71连接至排污增压泵72,当污水液位上限浮球开关触动时,排污电动球阀73的阀门开启,从而污水在经过排污电动球阀73后再通过排污口74排出。
如图1~图4所示,本发明中,小型自主洗地机器人还包括自主充电装置。同时因设置有自主加排水系统和自主充电装置,所以相应地设置有清水出水槽、污水接水槽、充电对接刷板、二维码板、排污口74、进水口、漏电断路器、电源插座、电源开关按钮、急停按钮14等,上述的部件均属于洗地机器人的常规设置,在此不再一一描述。
本发明中,小型自主洗地机器人还包括安全避障系统;所述的避障系统包括用于采集清扫区域图像的激光模块、设置于机体上以探测障碍物的超声波传感器、设置于防撞导向轮上的电子防撞条等。
如图1~图4所示,本发明采用双盘刷结构,本发明中,双盘刷1和吸水趴2均可自由升降,机体上设置有驱动盘刷1平稳水平升降的盘刷升降机构,在机体上还设置有驱动吸水趴2升降的吸水趴升降机构;吸水扒吸取污水。本发明中,底盘驱动系统包括布置在行进方向前方的万向轮13、左右各一采用两驱差速布置的左轮毂电机与右轮毂电机11。
本发明中,左轮毂电机与右轮毂电机11即为驱动轮;左轮毂电机与右轮毂电机11用于驱动机体行进或转向,且左轮毂电机与右轮毂电机11均采用直径为140mm大扭矩防滑轮毂电机;万向轮13采用聚氨酯制作具有防滑作用,更适合室内场景适用。
如图1~图4所示,本发明中,两只盘刷1沿前置的万向轮13为中心左右对称布置;所述盘刷1可在盘刷升降机构的驱动下升降。
本发明中,如图1~图4所示,小型自主洗地机器人的吸水趴2为可左右摆动的弧形结构,吸水趴2的左右摆动角度为30度;吸水趴2可在吸水趴升降机构的驱动下升降,吸水趴2头部的两端设置有两个防撞导向轮,后部设计有可调节万向轮13,用于调节吸水趴2胶皮压地的高度。
本发明的小型自主洗地机器人还包括:用于定位的电子码视觉导航、用于提供通讯连接信号的WIFI模块与4G路由、用于测量小型自主洗地机器人的空间坐标及加速度的IMU、用于近距离时精确定位导航的二维码相机、以及用于对路径进行扫描以规避或绕开路障的超声波传感器,所述的WIFI模块、4G路由、IMU及二维码相机与工控机通讯连接,所述超声波传感器与嵌入式主板通讯连接。
实施例2:
本实施例提供一种小型自主洗地机器人的控制系统,如图5所示,本控制系统包括:
进行激光扫描以获取清扫区域图像的激光模块;
与激光模块进行通讯传输的工控机;
根据工控机输出的信息进行操作控制的嵌入式主板;
与嵌入式主板连接的多个驱动部件、以及,由驱动部件驱动的多个执行部件,执行部件动作,可使小型自主洗地机器人执行行走、清洗、自主充电、自主加水、自主排污的操作;还包括与嵌入式主板连接的多个继电器,多个继电器驱动各阀门或泵体动作。
所述的驱动部件包括:驱动机体移动和转向的底盘驱动系统、洗地的左盘刷驱动及右盘刷驱动、吸除污水的吸水电机;所述的底盘驱动系统包驱动机体前后移动的推杆驱动和驱动机体转向的轮毂电机。
所述的继电器包括:控制洒水阀的继电器、控制污水过滤泵的继电器、控制污水过滤阀的继电器、控制排污泵的继电器、控制排污阀的继电器。
如图5所示,工控机通过激光模块获取的图像建立路径规划,规划好路径后在工控机的操作界面选择洒水水量、盘刷驱动转速、吸水电机54转速,然后一键启动,小型自主洗地机器人在底盘驱动系统的驱动作用下移动位置,边行走边进行自主清洗作业;
如图5所示,所述的控制系统还包括:设置在机体上用于进行末端精确定位的电子码视觉导航、用于提供通讯连接信号的WIFI模块与4G路由、用于测量小型自主洗地机器人的空间坐标及加速度的IMU、用于近距离时精确定位导航的二维码相机、用于对路径进行扫描以规避或绕开路障的超声波传感器;所述的WIFI模块、4G路由、IMU及二维码相机与工控机通讯连接,所述超声波传感器与嵌入式主板通讯连接;小型自主洗地机器人到达充电、加排水站点前1米附近,切换成电子码视觉导航进行精确定位。
如图5所示,所述的控制系统还包括设置在机体上的电子防撞条和用于控制污水水位与清水水位的浮球开关,所述的浮球开关与电子防撞条均与嵌入式主板通讯并受嵌入式主板控制。
本小型自主洗地机器人按照如下步骤进行控制,具体如S1~S6所示:
S1:小型自主洗地机器人通过激光SLAM模块获取图像,并进行定位及路径导航规划;
S2:工控机根据规划好的导航路径计算出运动方向和速度,按照拟定好的通讯协议由RS232通讯下发左轮毂电机控制/和右轮毂电机11控制、水量控制、左盘刷电机/和右盘刷电机控制、吸水电机54启动控制及转速控制等;
S2-1:嵌入式主板通过RS232通讯接收到工控机下发的左轮毂电机/和右轮毂电机11速度指令,通过CAN总线把左轮毂电机/和右轮毂电机11的驱动轮速度下发至伺服驱动器;伺服驱动器控制左轮毂电机/和右轮毂电机11的转动,伺服驱动器把轮毂电机相关的里程计、转速、故障等值通过CAN上传至嵌入式主板,再有嵌入式主板通过RS232上传至工控机,作为反馈;
S3:当启动清洗任务后,工控机下发由RS232通讯下发水量控制、左盘刷电机右盘刷电机、吸水电机54启动及转速指令;
S3-1:嵌入式主板通过RS232通讯接收到工控机下发的对应指令,通过RS232通讯把左盘刷电机右盘刷电机启动和速度数据下发至左盘刷电机右盘刷电机的驱动器,再由左盘刷电机右盘刷电机的驱动器控制左盘刷电机右盘刷电机的运行;
S3-2:水量控制由嵌入式主板通过继电器控制洒水阀8开关,清水箱4里的清水通过清水滤芯32过滤一次后,由清水洒水管3连接至洒水阀8分成两路水路进行洒水,洒出的水再通过左盘刷电机右盘刷电机旋转刷毛进行地面清洗;
S3-3:在清洗的同时,吸水电机54接收嵌入式主板通过PWM变化的脉冲信号进行高速转动,通过吸水电机54高速转动产生的高于18KPA吸力通过污水抽气管55连接至污水箱3出风口;清洗产生的污水由吸水趴2进行聚拢收集后,通过污水吸水管52进入污水箱3内,吸污管56把污水喷入污水过滤袋,垃圾和大颗粒泥沙通过过滤袋进行过滤收集;
S4:当污水箱3污水液位上限位浮球开关触发、清水箱4清水液位下限位浮球开关触发时,相关状态通过嵌入式主板采集由RS232上传至工控机,工控机通过嵌入式主板上传的信息做出相对应的决策,结束清洗任务;
S5:清洗任务结束后小型自主洗地机器人开始自主充电及加水排污,机器人导航生成一条由当前点前往充电、加排水站点的路径;机器人按照该路径到达充电、加排水站点前1米处,切换成二维码视觉导航进行末端精定位导航,当机器人完成与充电、加排水站对接后,由工控机上的WIFI模块主动建立与充电、加排水站WIFI模块TCP/IP连接,当通信成功后,由工控机下发自主充电、自主加水、自主排污等功能;当然此处的1米可以也可以是其它距离如0.8米处或1.1米处等,二维码也可以替换为条形码等;
S5-1:当嵌入式主板收到自主充电指令后,通过控制嵌入式主板的继电器控制充电使能接触器,充电、加排水站里充电机检测到刷板上的电压后进行充电工作,当电量充到设定值后,关闭充电使能接触器;
S5-2:当充电、加排水站接收到自主加水指令后,打开进水电磁阀,自来水通过电磁阀把水注入机器人注水口12在流经注水管10把水引流到清水箱4中,当嵌入式主板检测到清水箱4清水液位上限位浮球开关触发时,上传至工控机,然后由工控机做出停止加水决策,通过WIFI通讯下发停水指令,当充电、加排水站收到停水指令后关闭电磁阀,小型自主洗地机器人即关闭并完成充电、加排水的任务;
S5-3:当嵌入式主板接收自主排污指令后,通过控制继电器从而控制排污增压泵72、排污电动球阀73开启,污水箱3中的污水通过排污滤芯75流经排污管71,再通过排污增压泵72增压后经过排污电动球阀73把污水通过排污口74排出,充电、加排水站污水接水槽收集小型自主洗地机器人排出的污水,最终把污水排到指定的区域;当嵌入式主板检测到污水箱3污水液位下限位浮球开关触发时,上传至工控机,然后由工控机做出停止排污决策并下发停止排污指令至嵌入式主板,嵌入式主板接收到停止排污指令后,通过控制继电器从而控制排污增压泵72、排污电动球阀73关闭,小型自主洗地机器人即关闭并完成排污任务。
S6:自主充电加水排污后,小型自主洗地机器人按照路径导航返回至未完成洗地工作的区域继续完成后继的洗地工作,直至小型自主洗地机器人结束所有洗地任务,之后,再自动导航返回至S1步骤中未开始洗地时的初始位置,开始下次的洗地任务。
本文中所描述的具体实施例仅仅是对本发明精神作举例说明;本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后……)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
另外,在本发明中如涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
- 一种小型自主洗地机器人及其控制系统
- 一种智能安保服务机器人自主巡逻控制系统及自主巡逻控制方法