一种用于AGV机器人的高灵敏度避障系统及方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明属于AGV机器人领域,涉及高灵敏度避障技术,具体是一种用于AGV机器人的高灵敏度避障系统及方法。
背景技术
AGV即:Automated Guided Vehicle 简称AGV,当前最常见的应用如:AGV搬运机器人或AGV小车,主要功用集中在自动物流搬转运,AGV搬运机器人是通过特殊地标导航自动将物品运输至指定地点,最常见的引导方式为磁条引导,激光引导,磁钉导航、惯性导航;
制造业:市面上的AGV搬运机器人主要还集中应用在制造业物料搬运上,AGV在制造业应用中以其高效、准确、灵活地完成物料的搬运任务。并且可多台AGV组成柔性的物流搬运系统,搬运路线可以随着生产工艺流程的调整而及时调整,使一条生产线上能够制造出十几种产品,大大提高了生产的柔性和企业的竞争力。AGV作为基础搬运工具,AGV的应用深入到机械加工、家电生产、微电子制造、卷烟等多个行业,生产加工领域成为AGV应用最广泛的领域。
特种行业:在军事上以AGV的自动驾驶为基础集成其他探测和拆卸设备,可用于战场排雷和阵地侦察,英国军方正在研制的MINDER Recce是一辆侦察车,具有地雷探测、销毁及航路验证能力的自动型侦察车。在钢铁厂,AGV用于炉料运送,减轻了工人的劳动强度。在核电站和利用核辐射进行保鲜储存的场所,AGV用于物品的运送,避免了危险的辐射。在胶卷和胶片仓库,AGV可以在黑暗的环境中,准确可靠的运送物料和半成品。米克力美开发的AGV搬运机器人已经投入兵器维护和矿山实际应用。
餐饮服务业:未来在服务业AGV小车也有望大展身手,如餐厅传菜上菜端茶递水等基础劳动都可以有由AGV搬运机器人来实现。
食品医药业:对于搬运作业有清洁、安全、无排放污染等特殊要求的医药、食品、化工等行业中,AGV的应用也受到重视。
发明内容
本发明的目的在于提供一种用于AGV机器人的高灵敏度避障系统及方法,用于解决现有AGV机器人避障系统避障传感器失灵后无法避障的问题。
本发明的目的可以通过以下技术方案实现:
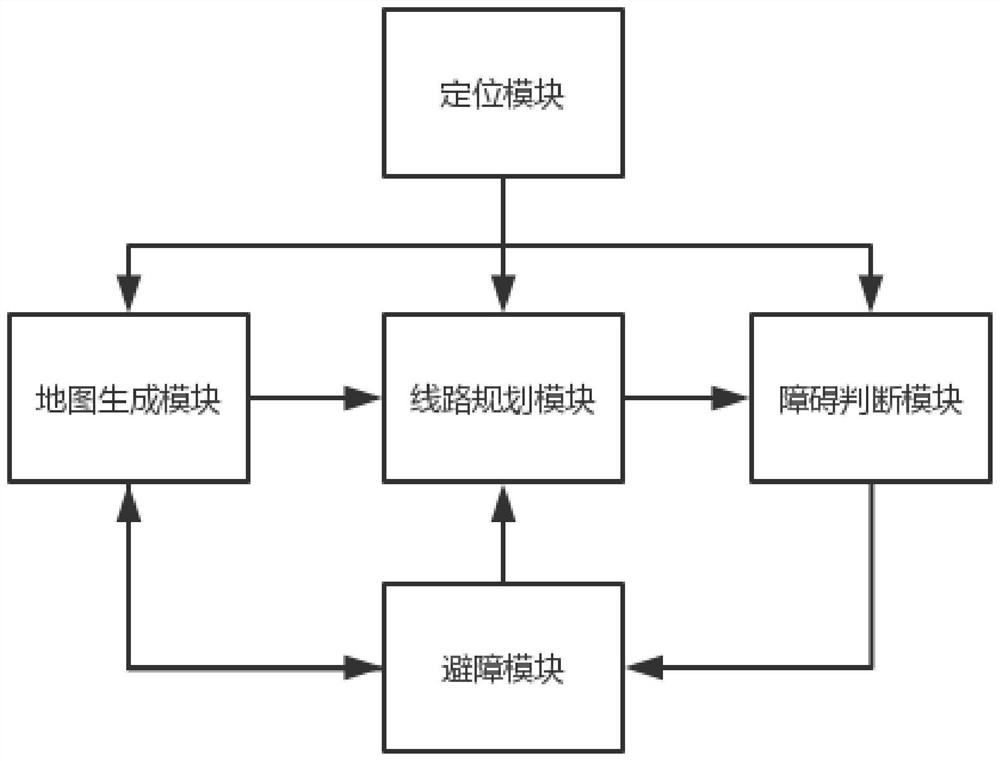
一种用于AGV机器人的高灵敏度避障系统,包括地图生成模块、线路规划模块、定位模块、障碍判断模块以及避障模块;
所述避障模块获取到调整指令后对AGV机器人进行调整避障,具体包括以下步骤:
步骤一:获取AGV机器人的运行安全宽度以及道路基点与障碍物模型最近距离;
步骤二:当道路基点与障碍物模型最近距离小于运行安全宽度时,挑选第N+1道路进行避障;
步骤三:当道路基点与障碍物模型最近距离大于或等于运行安全宽度时,将道路基点为行驶边界点进行避障;
所述地图生成模块用于生成AGV机器人运动区域的三维模型地图,具体的,地图生成模块包括BIM建模单元、地图建模单元以及物品建模单元;
所述BIM建模单元用于对运动区域内的建筑场景进行建模,具体为,获取运动区域内的建筑坐标以及建筑投影获取建筑的占地面积以及建筑层高,在通过BIM建模软件进行建模,获得建筑模型;
所述物品建模单元用于对运动区域内的实体物品进行物品建模,并获取物品建模对应的实体物品坐标;
所述地图建模单元通过获取运动区域的坐标进而确定运动区域范围,并生成对应的地图模型,具体包括以下步骤:
A1:获取运动区域,将运动区域放置在突出显示模板内;
A2:获取突出模板内的突出区域;
A3:选取突出区域的最值点,并连接最值点获得范围区域圈;
A4:获取范围区域圈内详细位置坐标,并在范围区域圈内进行标记;
A5:获取物品建模单元内的实体物品坐标与建筑坐标,并将实体物品坐标与建筑坐标与范围区域圈内详细位置坐标进行重合,并将重合后的坐标对应的仿真模型代入范围区域圈内得到三维模型地图;
其中,所述仿真模型包括物品建模与建筑模型。
进一步地,所述BIM建模软件包括 Revit、鸿业 Bimspace、 Magicad、 Navisworks软件。
进一步地,所述突出显示模板包括输入层、二维平面层、边缘采集层、人工学习层以及输出层;
所述输入层用于获取运动区域的全部位置坐标,具体为,通过市政地图获取运动区域内的全部位置坐标,具体包括道路基准点坐标、路牌坐标、建筑基准点坐标以及物品基准点;
所述二维平面层用于建立二维坐标系,并将运动区域的全部位置坐标代入二维坐标系内,具体为,与内置CAD软件建立数据连接,在CAD内调制出二维坐标系,并将运动区域的全部位置坐标与CAD内调制出的二维坐标系内坐标进行重合;
重合后将运动区域的全部位置坐标与CAD内调制出的二维坐标系原点相连,并选取出区域原点;具体的,将位置坐标与CAD内调制出的二维坐标系原点通过直线相连,并选取相连直线最短对应的位置坐标为区域原点;
获取到区域原点后,将CAD内调制出的二维坐标系对应进行移动,并得出突出区域,具体为,将CAD内调制出的二维坐标系原点与选取出的区域原点进行重合,对应的运动区域的全部位置坐标也随之变换,既产生突出区域;
所述边缘采集层用于获取突出区域内横坐标最大值、横坐标最小值、纵坐标最大值以及纵坐标最小值所对应的位置坐标,并标记为预选最值点;
所述人工学习层通过人工智能算法,对预选最值点进行迭代,获得最值点;
所述输出层用于对最值点进行输出。
进一步地,所述线路规划模块用于获取AGV机器人运动区域的三维模型地图,并获取三维模型地图内的道路模型,所述道路模型通过物品建模单元获取;
选取AGV机器人运行起点坐标与终点坐标,并选取起点坐标与终点坐标对应的全部道路模型,并根据道路模型的路程由低到高依次标记为第一道路、第二道路、第三道路……第N道路。
进一步地,所述定位模块用于实时获取AGV机器人的位置,具体为,接收AGV机器人的GPS坐标,并经过转换模型转化为区级坐标;
所述转换模型包括接收层、转换层、投影层以及输出层;
所述接收层用于接收AGV机器人的GPS坐标;
所述转换层用于将GPS坐标转化为ECEF坐标,具体为,将GPS卫星数据内的信息进行解码获得WGS-84坐标,通过对WGS-84坐标的平移、旋转以及缩放转化为ECEF坐标;
所述投影层通过高斯投影将ECEF坐标转化为平面直角坐标,并经过平移与旋转转换为地区坐标;
所述输出层用于将地区坐标进行输出。
进一步地,所述障碍判断模块用于判断前方是否出现障碍,具体包括如下步骤:
B1:获取第一道路、第二道路、第三道路……第N道路相对应的实体物品坐标;
B2:通过采集第一道路、第二道路、第三道路……第N道路的实时图像,获取第一道路、第二道路、第三道路……第N道路相对应的实时障碍物坐标;
B3:当实时障碍物坐标与实体物品坐标不相同时,获取对应实时图像进行图形分析,并生成调整指令。
进一步地,所述通过采集第一道路、第二道路、第三道路……第N道路的实时图像,具体为,通过若干无人机、摄像头以及高分卫星进行实时拍摄。
进一步地,所述获取对应实时图像进行图形分析,具体为,对实时图像进行图形识别,并将障碍物与背景图片进行分离;
将分离后的障碍物进行建模,生成障碍物模型,获取障碍物坐标并将障碍物模型代入三维模型地图内;
所述障碍物模型只具备X轴与Y轴矢量;
所述道路基点,具体为,道路模型的两边界坐标;
所述道路基点与障碍物模型最近距离,具体为,道路基点做垂直于障碍物模型的线段最短段。
一种用于AGV机器人的高灵敏度避障方法,所述高灵敏度避障方法具体包括以下步骤:
Q1:建立AGV机器人运动区域的三维模型地图;
Q2:对三维模型地图内道路进行划分;
Q3:实时监测道路信息;
Q4:获取到调整指令后对AGV机器人进行调整避障。
与现有技术相比,本发明的有益效果是:
(1)通过获取AGV机器人的运行安全宽度以及道路基点与障碍物模型最近距离;当道路基点与障碍物模型最近距离小于运行安全宽度时,挑选第N+1道路进行避障;当道路基点与障碍物模型最近距离大于或等于运行安全宽度时,将道路基点为行驶边界点进行避障,可以精确的另AGV机器人进行避障,解决现在避障系统均为动态避障,一点出现传感器失灵,便无法避障;本发明通过将预先建立的三维模型地图加载至AGV机器人内,避免数据数据传输造成的信息延迟,同时通过对三维模型地图道路边界的定位,使得即使避障传感器失灵时,也可以通过三维模型地图内的坐标点进行避障;
(2)通过BIM建模单元用于对运动区域内的建筑场景进行建模,具体为,获取运动区域内的建筑坐标以及建筑投影获取建筑的占地面积以及建筑层高,在通过BIM建模软件进行建模,获得建筑模型;物品建模单元用于对运动区域内的实体物品进行物品建模,并获取物品建模对应的实体物品坐标;地图建模单元通过获取运动区域的坐标进而确定运动区域范围,并生成对应的地图模型,具体包括以下步骤:获取运动区域,将运动区域放置在突出显示模板内;获取突出模板内的突出区域;选取突出区域的最值点,并连接最值点获得范围区域圈;获取范围区域圈内详细位置坐标,并在范围区域圈内进行标记;获取物品建模单元内的实体物品坐标与建筑坐标,并将实体物品坐标与建筑坐标与范围区域圈内详细位置坐标进行重合,并将重合后的坐标对应的仿真模型代入范围区域圈内得到三维模型地图;其中,仿真模型包括物品建模与建筑模型,预先建立的三维模型地图加载至AGV机器人内,避免数据数据传输造成的信息延迟,造成机器故障;
(3)通过定位模块用于实时获取AGV机器人的位置,具体为,接收AGV机器人的GPS坐标,并经过转换模型转化为区级坐标;转换模型包括接收层、转换层、投影层以及输出层;接收层用于接收AGV机器人的GPS坐标;转换层用于将GPS坐标转化为ECEF坐标,具体为,将GPS卫星数据内的信息进行解码获得WGS-84坐标,通过对WGS-84坐标的平移、旋转以及缩放转化为ECEF坐标;投影层通过高斯投影将ECEF坐标转化为平面直角坐标,并经过平移与旋转转换为地区坐标;输出层用于将地区坐标进行输出,更加精准的定位AGV机器人的移动坐标,避免GPS坐标不兼容;
(4)通过突出显示模板包括输入层、二维平面层、边缘采集层、人工学习层以及输出层;输入层用于获取运动区域的全部位置坐标,具体为,通过市政地图获取运动区域内的全部位置坐标,具体包括道路基准点坐标、路牌坐标、建筑基准点坐标以及物品基准点;二维平面层用于建立二维坐标系,并将运动区域的全部位置坐标代入二维坐标系内,具体为,与内置CAD软件建立数据连接,在CAD内调制出二维坐标系,并将运动区域的全部位置坐标与CAD内调制出的二维坐标系内坐标进行重合;重合后将运动区域的全部位置坐标与CAD内调制出的二维坐标系原点相连,并选取出区域原点;具体的,将位置坐标与CAD内调制出的二维坐标系原点通过直线相连,并选取相连直线最短对应的位置坐标为区域原点;获取到区域原点后,将CAD内调制出的二维坐标系对应进行移动,并得出突出区域,具体为,将CAD内调制出的二维坐标系原点与选取出的区域原点进行重合,对应的运动区域的全部位置坐标也随之变换,既产生突出区域;边缘采集层用于获取突出区域内横坐标最大值、横坐标最小值、纵坐标最大值以及纵坐标最小值所对应的位置坐标,并标记为预选最值点;人工学习层通过人工智能算法,对预选最值点进行迭代,获得最值点;输出层用于对最值点进行输出,使得运动区域的位置坐标更加精准,避免出现缺失的问题,同时通过坐标转换,使得本发明AGV机器人使用的坐标唯一性,提高使用稳定性与抗干扰性。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明原理框图。
具体实施方式
为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
因此,在下述附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。
如图1所示,一种用于AGV机器人的高灵敏度避障方法,,高灵敏度避障方法具体包括以下步骤:
Q1:建立AGV机器人运动区域的三维模型地图;
Q2:对三维模型地图内道路进行划分;
Q3:实时监测道路信息;
Q4:获取到调整指令后对AGV机器人进行调整避障。
一种用于AGV机器人的高灵敏度避障系统,包括地图生成模块、线路规划模块、定位模块、障碍判断模块以及避障模块;
具体的,地图生成模块用于生成AGV机器人运动区域的三维模型地图,具体的,地图生成模块包括BIM建模单元、地图建模单元以及物品建模单元;
BIM建模单元用于对运动区域内的建筑场景进行建模,具体为,获取运动区域内的建筑坐标以及建筑投影获取建筑的占地面积以及建筑层高,在通过BIM建模软件进行建模,获得建筑模型;
物品建模单元用于对运动区域内的实体物品进行物品建模,并获取物品建模对应的实体物品坐标;
地图建模单元通过获取运动区域的坐标进而确定运动区域范围,并生成对应的地图模型,具体包括以下步骤:
A1:获取运动区域,将运动区域放置在突出显示模板内;
A2:获取突出模板内的突出区域;
A3:选取突出区域的最值点,并连接最值点获得范围区域圈;
A4:获取范围区域圈内详细位置坐标,并在范围区域圈内进行标记;
A5:获取物品建模单元内的实体物品坐标与建筑坐标,并将实体物品坐标与建筑坐标与范围区域圈内详细位置坐标进行重合,并将重合后的坐标对应的仿真模型代入范围区域圈内得到三维模型地图;
优选的,仿真模型包括物品建模与建筑模型。
再本发明具体实施时,BIM建模软件可选取 Revit、鸿业 Bimspace、 Magicad、Navi sworks软件中任一种;
更加优选地,突出显示模板包括输入层、二维平面层、边缘采集层、人工学习层以及输出层;
具体的,输入层用于获取运动区域的全部位置坐标,具体为,通过市政地图获取运动区域内的全部位置坐标,具体包括道路基准点坐标、路牌坐标、建筑基准点坐标以及物品基准点;
具体的,二维平面层用于建立二维坐标系,并将运动区域的全部位置坐标代入二维坐标系内,具体为,与内置CAD软件建立数据连接,在CAD内调制出二维坐标系,并将运动区域的全部位置坐标与CAD内调制出的二维坐标系内坐标进行重合;
重合后将运动区域的全部位置坐标与CAD内调制出的二维坐标系原点相连,并选取出区域原点;具体的,将位置坐标与CAD内调制出的二维坐标系原点通过直线相连,并选取相连直线最短对应的位置坐标为区域原点;
获取到区域原点后,将CAD内调制出的二维坐标系对应进行移动,并得出突出区域,具体为,将CAD内调制出的二维坐标系原点与选取出的区域原点进行重合,对应的运动区域的全部位置坐标也随之变换,既产生突出区域;
具体的,边缘采集层用于获取突出区域内横坐标最大值、横坐标最小值、纵坐标最大值以及纵坐标最小值所对应的位置坐标,并标记为预选最值点;
具体的,人工学习层通过人工智能算法,对预选最值点进行迭代,获得最值点;
具体的,输出层用于对最值点进行输出。
具体的,人工智能算法可选用卷积人工智能算法。
优选地,线路规划模块用于获取AGV机器人运动区域的三维模型地图,并获取三维模型地图内的道路模型,道路模型通过物品建模单元获取;
选取AGV机器人运行起点坐标与终点坐标,并选取起点坐标与终点坐标对应的全部道路模型,并根据道路模型的路程由低到高依次标记为第一道路、第二道路、第三道路……第N道路。
定位模块用于实时获取AGV机器人的位置,具体为,接收AGV机器人的GPS坐标,并经过转换模型转化为区级坐标;
转换模型包括接收层、转换层、投影层以及输出层;
具体的,接收层用于接收AGV机器人的GPS坐标;
具体的,转换层用于将GPS坐标转化为ECEF坐标,具体为,将GPS卫星数据内的信息进行解码获得WGS-84坐标,通过对WGS-84坐标的平移、旋转以及缩放转化为ECEF坐标;
具体的,投影层通过高斯投影将ECEF坐标转化为平面直角坐标,并经过平移与旋转转换为地区坐标;
具体的,输出层用于将地区坐标进行输出。
优选地,障碍判断模块用于判断前方是否出现障碍,具体包括如下步骤:
B1:获取第一道路、第二道路、第三道路……第N道路相对应的实体物品坐标;
B2:通过采集第一道路、第二道路、第三道路……第N道路的实时图像,获取第一道路、第二道路、第三道路……第N道路相对应的实时障碍物坐标;
B3:当实时障碍物坐标与实体物品坐标不相同时,获取对应实时图像进行图形分析,并生成调整指令。
优选地,通过采集第一道路、第二道路、第三道路……第N道路的实时图像,具体为,通过若干无人机、摄像头以及高分卫星进行实时拍摄。
优选地,获取对应实时图像进行图形分析,具体为,对实时图像进行图形识别,并将障碍物与背景图片进行分离;
将分离后的障碍物进行建模,生成障碍物模型,获取障碍物坐标并将障碍物模型代入三维模型地图内;
优选地,障碍物模型只具备X轴与Y轴矢量;
优选地,道路基点,具体为,道路模型的两边界坐标;
优选地,道路基点与障碍物模型最近距离,具体为,道路基点做垂直于障碍物模型的线段最短段。
避障模块获取到调整指令后对AGV机器人进行调整避障,具体包括以下步骤:
步骤一:获取AGV机器人的运行安全宽度以及道路基点与障碍物模型最近距离;
步骤二:当道路基点与障碍物模型最近距离小于运行安全宽度时,挑选第N+1道路进行避障;
步骤三:当道路基点与障碍物模型最近距离大于或等于运行安全宽度时,将道路基点为行驶边界点进行避障。
上述公式均是去量纲取其数值计算,公式是由采集大量数据进行软件模拟得到最近真实情况的一个公式,公式中的预设参数由本领域的技术人员根据实际情况进行设置。
在本发明所提供的实施例中,应该理解到,所揭露的设备,装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述模块的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式;所述作为分离部件说明的模块可以是或者也可以不是物理上分开的,作为模块显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方法的目的。
另对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。
因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化涵括在本发明内。不应将权利要求中的任何附关联图标记视为限制所涉及的权利要求。
此外,显然“包括”一词不排除其他单元或步骤,单数不排除复数。系统权利要求中陈述的多个单元或装置也可以由一个单元或装置通过软件或者硬件来实现。第二等词语用来表示名称,而并不表示任何特定的顺序。
最后应说明的是,以上实施例仅用以说明本发明的技术方法而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方法进行修改或等同替换,而不脱离本发明技术方法的精神和范围。
- 一种用于AGV机器人的高灵敏度避障系统及方法
- 一种用于机器人跟踪与避障的超声波传感器系统的控制方法