一种四自由度并联机器人包装机
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及金属零件包装的技术领域,特别是一种四自由度并联机器人包装机。
背景技术
载盘的结构如图1所示,其上开设有多个呈阵列分布的容纳槽(23),相邻两个容纳槽(23)之间的间距相等,工艺上要求向各个容纳槽(23)内填装如图2所示的金属零件(24),并确保各个容纳槽(23)内金属零件(24)的方向一致如图1所示,以完成金属零件的包装。目前,包装机器人的工作方式是先通过第一个CCD镜头识别下方是否有金属零件通过,若有金属零件通过时,机器人手臂将金属零件吸附起来,吸附起来后转运到第二个CCD镜头的正上方,识别后,通过旋转机构调节被吸附的金属零件的方向,以完成金属零件方向的纠正,最后通过转运机构将纠正方向后的金属零件抓取到载盘(4)的容纳槽(23))内,如此重复以上操作,即可最终向各个容纳槽(23)内填装一个金属零件。然而,这种包装机器人虽然能够将金属零件抓取到容纳槽(23)内,但是每次吸附起一个零件后,都需要转运到第二个CCD镜头的正上方以纠正方向,这无疑是增加了包装工序,进而增加了包装时间,降低了金属零件的包装效率。
发明内容
本发明的目的在于克服现有技术的缺点,提供一种结构紧凑、提高金属零件包装效率、实现动态抓料、自动化程度高的四自由度并联机器人包装机。
本发明的目的通过以下技术方案来实现:一种四自由度并联机器人包装机,它包括机台、固设于机台顶表面上的机架、皮带输送装置和载盘,机架上设置有抓料机构,抓料机构包括固设于机架上的安装板、设置于安装板下方的旋转台、旋转安装于旋转台内的转轴,转轴的下端部向下贯穿旋转台设置,且延伸端上固设有吸嘴,转轴的上端部连接有万向接头B,万向接头B的另一输出端连接有导向筒,导向筒的内壁上开设有沿其轴向设置的导向槽,所述安装板的底表面上且沿其周向上固设有三个电机,电机的输出轴上固设有连接轴筒,连接轴筒的另一端上经球铰链座A铰接有长杆,各个长杆的另一端经球铰链座B铰接于旋转台上;所述安装板的底表面上固设有伺服电机,伺服电机设置于三个电机所围成的区域内,伺服电机的输出轴上连接有万向接头A,万向接头A的另一输出端连接有导向杆,导向杆的外壁上固设有沿其轴向设置的导轨,导向杆滑动安装于导向筒内,且其上的导轨与导向槽相配合;
其中一个电机上设置有CCD镜头,CCD镜头发出的光柱朝向皮带输送装置的皮带设置。
三个电机均匀分布。
所述吸嘴的侧壁上连接有与其连通的吸管,吸管的另一端与真空泵的工作端口连接。
所述连接轴筒上经球铰链座A铰接有两根长杆,两根长杆的另一端均经球铰链座B铰接于旋转台的外边缘上。
其中一个电机外壳的底表面上固设有固定板,所述CCD镜头设置于固定板上。
它还包括控制器,所述控制器与伺服电机、真空泵、CCD镜头和三个电机电连接。
所述皮带输送装置设置于载盘的前侧。
本发明具有以下优点:本发明结构紧凑、提高金属零件包装效率、实现动态抓料、自动化程度高。
附图说明
图1为载盘的结构示意图;
图2为金属零件的结构示意图;
图3为本发明的结构示意图;
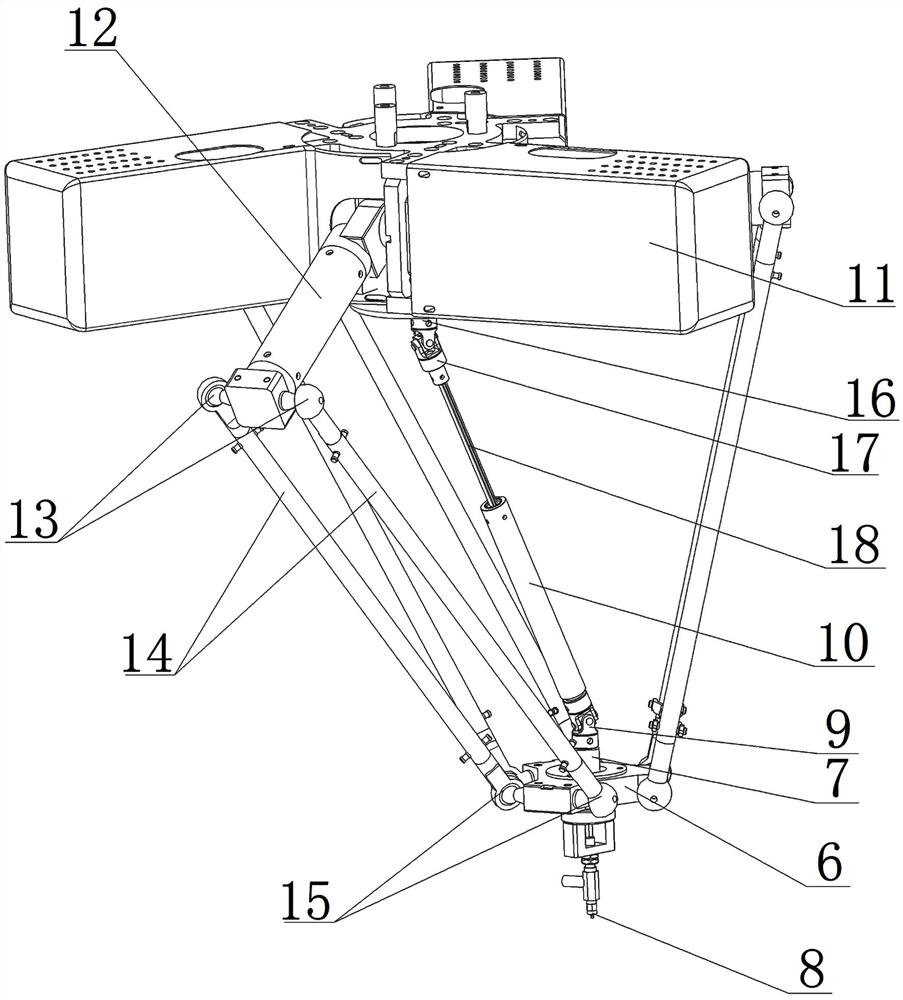
图4为抓料机构的结构示意图;
图5为导向杆的结构示意图;
图中,1-机台,2-机架,3-皮带输送装置,4-载盘,5-安装板,6-旋转台,7-转轴,8-吸嘴,9-万向接头B,10-导向筒,11-电机,12-连接轴筒,13-球铰链座A,14-长杆,15-球铰链座B,16-伺服电机,17-万向接头A,18-导向杆,19-导轨,20-CCD镜头,21-皮带,22-固定板,23-容纳槽,24-金属零件。
具体实施方式
下面结合附图对本发明做进一步的描述,本发明的保护范围不局限于以下所述:
如图3~5所示,一种四自由度并联机器人包装机,它包括机台1、固设于机台1顶表面上的机架2、皮带输送装置3和载盘4,所述皮带输送装置3设置于载盘4的前侧,机架2上设置有抓料机构,抓料机构包括固设于机架2上的安装板5、设置于安装板5下方的旋转台6、旋转安装于旋转台6内的转轴7,转轴7的下端部向下贯穿旋转台6设置,且延伸端上固设有吸嘴8,转轴7的上端部连接有万向接头B9,万向接头B9的另一输出端连接有导向筒10,导向筒10的内壁上开设有沿其轴向设置的导向槽,所述安装板5的底表面上且沿其周向上固设有三个电机11,三个电机11均匀分布,电机11的输出轴上固设有连接轴筒12,连接轴筒12的另一端上经球铰链座A13铰接有长杆14,各个长杆14的另一端经球铰链座B15铰接于旋转台6上;所述安装板5的底表面上固设有伺服电机16,伺服电机16设置于三个电机11所围成的区域内,伺服电机16的输出轴上连接有万向接头A17,万向接头A17的另一输出端连接有导向杆18,导向杆18的外壁上固设有沿其轴向设置的导轨19,导向杆18滑动安装于导向筒10内,且其上的导轨19与导向槽相配合;其中一个电机11上设置有CCD镜头20,CCD镜头20发出的光柱朝向皮带输送装置3的皮带21设置。
所述吸嘴8的侧壁上连接有与其连通的吸管,吸管的另一端与真空泵的工作端口连接,所述连接轴筒12上经球铰链座A13铰接有两根长杆14,两根长杆14的另一端均经球铰链座B15铰接于旋转台6的外边缘上。其中一个电机11外壳的底表面上固设有固定板22,所述CCD镜头20设置于固定板22上。它还包括控制器,所述控制器与伺服电机16、真空泵、CCD镜头20和三个电机11电连接。
本发明的工作过程如下:
S1、打开皮带输送装置3的动力部分,皮带21的上边带朝向载盘4方向运动;
S2、工人将待包装的金属零件一个接一个间隔的任意摆放在皮带21的上边带上;
S3、上边带将第一个金属零件A朝向载盘4方向输送,当金属零件A运动到CCD镜头20的正下方时,CCD镜头20将金属零件A的位置信息转换成电信号,并将该电信号传递给控制器,控制器接收到该电信号后,控制三个电机11联动,电机11带动连接轴筒12转动,连接轴筒12带动长杆14运动,长杆14带动旋转台6运动,以使旋转台6平动的朝向金属零件A方向运动,进而使吸嘴8同步做平动,当吸嘴8的底表面接触到金属零件A后,控制器控制真空泵启动,真空泵对吸嘴8抽真空,从而将金属零件A吸附住;
S4、当金属零件A被吸嘴8吸住后,控制器控制三个电机11再次联动,以使被吸附的金属零件A朝向载盘4方向运动,在运动过程中,控制器控制伺服电机16动作,伺服电机16带动万向接头A17旋转,万向接头A17带动导向杆18旋转,导向杆18带动导向筒10旋转,导向筒10带动万向接头B9旋转,万向接头B9带动转轴7旋转,转轴7带动吸嘴8旋转,从而使被吸附的金属零件A旋转一定角度,以使金属零件A的方向满足设计的要求,当金属零件A进入到容纳槽23内后,控制器控制真空泵关闭,金属零件A掉落在容纳槽内,从而实现了第一个金属零件A的包装;
S5、重复步骤S2~S4的操作,即可实现对金属零件进行包装,从而实现了金属零件的连续包装,极大的提高了包装效率。
其中,在步骤S4中,实现了在转运金属零件的过程中,完成对金属零件方向的调整,确保了各个容纳槽内金属零件的摆放方向一致,相比传统的包装机器人,减少了包装工序,进而节省了包装时间,提高了金属零件的包装效率。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种四自由度并联机器人包装机
- 基于三自由度和四自由度并联机构的混联喷涂机器人