一种基于稀疏处理的雷达回波信号精确测向方法
文献发布时间:2023-06-19 09:26:02
技术领域
本发明属于雷达技术领域,具体涉及一种基于稀疏处理的雷达回波信号精确测向方法。
背景技术
随着科技的进步雷达技术在不断发展,阵列信号处理这一技术广泛应用于多个领域,而其中的一个重要研究方向就是信号的波达方向(DOA)估计。传统的波束形成(CBF)算法通过对阵元延时后的阵列数据进行加权处理,在某一特定方向上形成主波束来实现DOA估计,但阵列天线的物理孔径即瑞利限对该方法具有制约作用,导致测向精度降低。该方法根据噪声子空间和信号子空间的正交性进行谱峰搜索,从而实现方位估计,后来也将该算法进行改进并应用于二维搜索,之后对MUSIC算法在不同阵元个数和高低信噪比情况下都进行了分析。
现有技术压缩感知理论总结研究了稀疏信号的恢复重构,这一理论逐渐广泛应用于图像处理等多个方面,而在阵列信号DOA估计中的应用也不断增多。
发明内容
针对现有技术的不足,本发明的目的在于提供一种基于稀疏处理的雷达回波信号的精确测向技术,以解决现有技术中存在的测向精度不高的问题。
为解决上述技术问题,本发明所采用的技术方案是:
一种雷达回波信号精确测向方法,包括如下步骤:
获取阵列信号和入射角;
对所述阵列信号进行DBF处理,得到目标方向图;
根据所述目标方向图和入射角获取粗略方位角;
根据所述粗略方位角设置方位角的搜索范围和搜索间隔;
根据所述搜索范围和搜索间隔构造包含搜索范围的字典矩阵;
通过对所述阵列信号的协方差矩阵进行特征分解构造观测矩阵;
将所述字典矩阵、观测矩阵和稀疏度输入到MFOCUSS算法中进行稀疏重构得到稀疏解矩阵;
对稀疏解矩阵进行归一化处理,获取角度域稀疏图;
根据所述角度域稀疏图获取精确方位角。
进一步的,所述阵列信号为:
X(t)=A*S(t)+n(t) (15)
S(t)=[S
其中,X(t)为阵列信号,A和s(t)分别为M×Q、Q×1的矩阵,n(t)为噪声矢量,a(θ
进一步的,所述DBF处理的方法为将复数权矢量与阵列信号做内积,做内积的公式为:
Y(t)=W
其中,[·]
进一步的,所述协方差矩阵通过K次快拍数据估计得到,所述协方差矩阵表示为:
其中,R
进一步的,进行特征分解后的协方差矩阵为:
R
式中,E
进一步的,所述观测矩阵由Q个大的特征值对应的特征向量构成的信号子空间,观测矩阵表示为:
式中,λ为对协方差矩阵R
进一步的,所述字典矩阵为:
A=[a(θ
式中,
其中,A为字典矩阵,a(θ
进一步的,所述稀疏解矩阵为:
S=[S(θ
其中,S为稀疏解矩阵,[·]
一种雷达回波信号精确测向系统,所述系统包括:
第一获取模块:用于获取阵列信号和入射角;
处理模块:用于对所述阵列信号进行DBF处理,得到目标方向图;
第二获取模块:用于根据所述目标方向图和入射角获取粗略方位角;
设置模块:用于根据所述粗略方位角设置方位角的搜索范围和搜索间隔;
第一构造模块:用于根据所述搜索范围和搜索间隔构造包含搜索范围的字典矩阵;
第二构造模块:用于通过对所述阵列信号的协方差矩阵进行特征分解构造观测矩阵;
稀疏重构模块:用于将所述字典矩阵、观测矩阵和稀疏度输入到MFOCUSS算法中进行稀疏重构得到稀疏解矩阵;
归一化模块:用于对稀疏解矩阵进行归一化处理,获取角度域稀疏图;
第三获取模块:用于根据所述角度域稀疏图获取精确方位角。
一种雷达回波信号精确测向系统,所述系统包括处理器和存储介质;
所述存储介质用于存储指令;
所述处理器用于根据所述指令进行操作以执行上述所述方法的步骤。
与现有技术相比,本发明所达到的有益效果:
本发明通过目标方向图和角度域稀疏图分别测得粗略方位角和精确方位角,由粗略方位角经过稀疏重构处理得到精确方位角,不但提高了测向精度,而且在构造字典矩阵的过程中减少了角度搜索的个数,从而降低了字典矩阵的维度,减少计算量。
附图说明
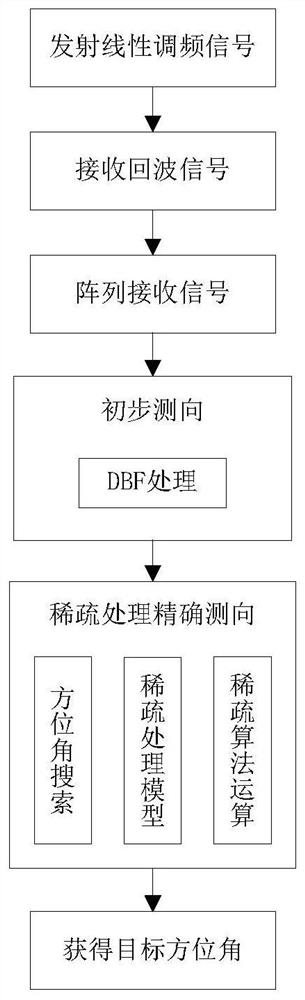
图1为基于稀疏处理的精确测向流程框图;
图2为DBF方向图;
图3为稀疏处理精确测向。
具体实现方式
下面对本发明作进一步描述。以下内容仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
本发明通过对雷达回波信号进行稀疏处理来得到目标的精确方位角。对得到的阵列接收信号,主要通过两个步骤来获得目标方位角。首先通过DBF方向图得到目标的粗略方位角,然后根据稀疏处理技术进行方位角的精确搜索,进而得到目标的精确方位角。
如图1所示,一种基于稀疏处理的雷达回波信号精确测向方法,包括如下步骤:
步骤一:初步测向
通过对阵列接收信号做DBF处理,得到目标方向图,测得目标粗略方位角θ
步骤二:稀疏处理精确测向
在粗略方位角θ
(1)对阵列接收信号进行数据处理构造观测矩阵;
(2)设置方位角遍历范围,构造包含所设置的方位角范围的字典矩阵;
(3)将观测矩阵、字典矩阵输入到MFOCUSS算法中进行稀疏重构得到稀疏解;
步骤四:对稀疏解进行归一化处理,得到角度域稀疏图,测得精确方位角。
阵列信号模型
假设雷达发射线性调频信号,则信号表示为:
式中,a
其中,rect(·)为标准矩形脉冲函数,具有如下形式:
假设共发射N个雷达脉冲,每个脉冲的载频为f
s
经过时延和多普勒后,第n个脉冲后的回波信号表示为:
s
式中,τ
假设目标在距离R
s
在下变频过程中,采用exp(-j2πf
S
设有一个阵元数为M,各阵元间距为d的均匀直线阵,到达信号波长λ=v/f
式中,
则在窄带线阵条件下,第q个信号源方位角为θ
其中,S
当同时存在Q个照射源信号入射到阵元上时,天线阵总输出为:
X(t)=a(θ
展开成矩阵为:
可简写为:
X(t)=A*S(t) (11)
式中,A和S(t)分别为M×Q、Q×1的矩阵,且分别为:
S(t)=[S
考虑到在实际情况下,天线阵会接收到的噪声和各阵元通道存在噪声,噪声矢量表示为:
n(t)=[n
可改写为
X(t)=A*S(t)+n(t) (15)
X=AS+N (16)
2初步测向
对阵列接收信号做DBF处理。波束形成是对阵列信号进行复加权求和,用复数权矢量W与阵列输出信号X(t)做内积,即:
Y(t)=W
式中,[·]
当波前信号S(t)照射到等距线阵,入射角为θ
此时的权矢量W使波束形成后方向图的主瓣指向为θ
3稀疏处理精确测向
首先在粗略方位角θ
3.1稀疏模型
阵列接收信号经过脉压后的协方差矩阵可以通过K次快拍数据估计得到,表示为:
其中,X(n)为脉压后第i个脉冲对应的回波信号,此时R为一个M×M的矩阵。
对R
R
式中E
其中,特征值分解后得到与信号源个数相同的Q个大的特征值,对应的特征向量构成信号子空间,即观测矩阵表示为:
式中λ=[λ
根据初步测向得到的粗略方位角θ
角度搜索θ
A=[a(θ
式中
稀疏解矩阵表示为:
S=[S(θ
其中,[·]
3.2MFOCUSS算法
将稀疏表示模型改写为:
S=A
式中,符号“+”表示Moore-Penrose伪逆,A
利用权矩阵W,可得
S=W(AW)
其中,q=(AW)
min||q||
MFOCUSS算法的基本迭代如下:
输入:观测矩阵X,字典矩阵A,正则化参数λ
输出:重构后的信号S
步骤一:设定初始解S
步骤二:求权矩阵W
步骤三:求解A
步骤四:得到S
步骤五:计算相对误差σ
通过迭代,求得信号在角度域的稀疏解,获得目标角度的估计值。
4实施例
雷达发射16个脉冲的线性调频信号,假设目标方位角为45.3°,接收线阵共有25个阵元。如表1所示为雷达与目标的参数设置。
表1雷达与目标参数设置
对阵列信号进行处理,通过DBF波束形成得到目标粗略方位角,再通过稀疏处理技术进行目标方位角的精确估计。
(1)首先进行初步测向。得到如图2所示的DBF方向图。由上图可知,方向图中的主瓣对应目标方位角,测得粗略方位角θ
(2)稀疏处理精确测向。根据θ
根据
对阵列接收信号的协方差矩阵
将字典矩阵A,观测矩阵X和稀疏度K=1输入到MFOCUSS算法中得出101×1的稀疏解矩阵S。
(3)参数估计
对稀疏解S进行归一化处理,找出S中最大的元素s(i,j),得到矩阵
如图3所示为设置方位角搜索范围后,通过稀疏处理进行精确测向。
图中出现一个峰值具有稀疏性,测得方位角为45.3°,与目标真实角度一致。
本发明通过二次测向,不但提高了测向精度,而且在构造字典矩阵的过程中减少了角度搜索的个数,从而降低了字典矩阵的维度,减少计算量。
一种雷达回波信号精确测向系统,所述系统包括:
第一获取模块:用于获取阵列信号和入射角;
处理模块:用于对所述阵列信号进行DBF处理,得到目标方向图;
第二获取模块:用于根据所述目标方向图和入射角获取粗略方位角;
设置模块:用于根据所述粗略方位角设置方位角的搜索范围和搜索间隔;
第一构造模块:用于根据所述搜索范围和搜索间隔构造包含搜索范围的字典矩阵;
第二构造模块:用于通过对所述阵列信号的协方差矩阵进行特征分解构造观测矩阵;
稀疏重构模块:用于将所述字典矩阵、观测矩阵和稀疏度输入到MFOCUSS算法中进行稀疏重构得到稀疏解矩阵;
归一化模块:用于对稀疏解矩阵进行归一化处理,获取角度域稀疏图;
第三获取模块:用于根据所述角度域稀疏图获取精确方位角。
一种雷达回波信号精确测向系统,所述系统包括处理器和存储介质;
所述存储介质用于存储指令;
所述处理器用于根据所述指令进行操作以执行上述所述方法的步骤。
本申请是参照根据本申请实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
以上仅为本发明的实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均包含在申请待批的本发明的权利要求范围之内。