一种可自动进料的农业牧草粉碎装置
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及农业设备技术领域,具体为一种可自动进料的农业牧草粉碎 装置。
背景技术
牧草,一般指供饲养的牲畜食用的草或其他草本植物,牧草再生力强, 一年可收割多次,富含各种微量元素和维生素,因此成为饲养家畜的首选, 牧草品种的优劣直接影响到畜牧业经济效益的高低,需加以重视;
现有的牧草粉碎装置在进行牧草粉碎时,工作人员需要手扶牧草一点点 地推送进粉碎装置内,从而需要消耗工作人员大量的精力和体力,且牧草离 粉碎装置的距离越近危险性越高,目前粉碎装置虽然实现对牧草的自动粉碎, 但粉碎效果不佳,仍有较长的牧草未被完全粉碎后排出,从而降低了牧草的 加工质量。
发明内容
本发明的目的在于提供一种可自动进料的农业牧草粉碎装置,以解决上 述背景技术中对牧草进料时需要消耗工作人员大量的精力和体力,且具备一 定的危险性,粉碎效果不佳,仍有较长的牧草未被完全粉碎后排出,从而降 低了牧草的加工质量问题。
为实现上述目的,本发明提供如下技术方案:一种可自动进料的农业牧 草粉碎装置,包括:
底座;
第一壳体,所述第一壳体的底端四角均固定设置有立柱,且所述立柱 固定设置在所述底座的顶端;
粉碎装置,设置在所述第一壳体的内腔底端;
收料桶,放置在所述底座的底端,且所述收料桶位于所述第一壳体底 端出口处的正上方;
第二壳体,固定设置在所述第一壳体的一侧,所述第二壳体的一侧与 第一壳体的内腔相通,且所述第二壳体的另一侧为贯通状;
进料机构,设置在所述第二壳体的内腔;
切碎机构,设置在所述第一壳体的内腔一侧。
优选的,所述第一壳体的内腔从上至下向内侧倾斜设置。
优选的,所述第一壳体的内腔一侧固定设置有挡板。
优选的,所述进料机构包括:减速电机,固定设置在所述第二壳体的前 侧底端;第一转动辊,所述减速电机的输出端延伸进所述第二壳体的内腔并 固定设置有第一转动辊,且所述第一转动辊的一端与所述第二壳体的内壁转 动连接;滑块,所述第二壳体的内腔前后两侧均沿上下方向开设有滑槽,所 述滑槽的内腔插接有滑块;U形板,固定设置在所述滑块的内侧;第二转动辊, 转动设置在所述U形板的内侧;液压缸,固定设置在所述第二壳体的顶端, 所述液压缸的底端延伸进所述第二壳体的内腔并与U形板的顶端固定连接。
优选的,所述第二转动辊位于所述第一转动辊的正上方。
优选的,所述挡板的一侧延伸进所述第二壳体的内腔,且所述挡板的上 表面低于所述第一转动辊的外壁顶端高度。
本发明提出的一种可自动进料的农业牧草粉碎装置,有益效果在于:
1、本发明通过设置有进料机构可控制第二转动辊上下移动,从而通过与 第一转动辊的配合可对放入进第二壳体内的牧草压紧,控制第一转动辊逆时 针转动后可带动牧草向第一壳体内移动,从而可完成对牧草的自动进料,降 低了工作人员体力和精力的消耗,且安全性较高;
2、本发明通过设置有切碎机构可控制切刀上下往复移动,从而通过与条 形孔的配合可对移动至挡板上的牧草进行切割,切割后的牧草再通过粉碎装 置进行粉碎后,从而可提高牧草的粉碎质量。
附图说明
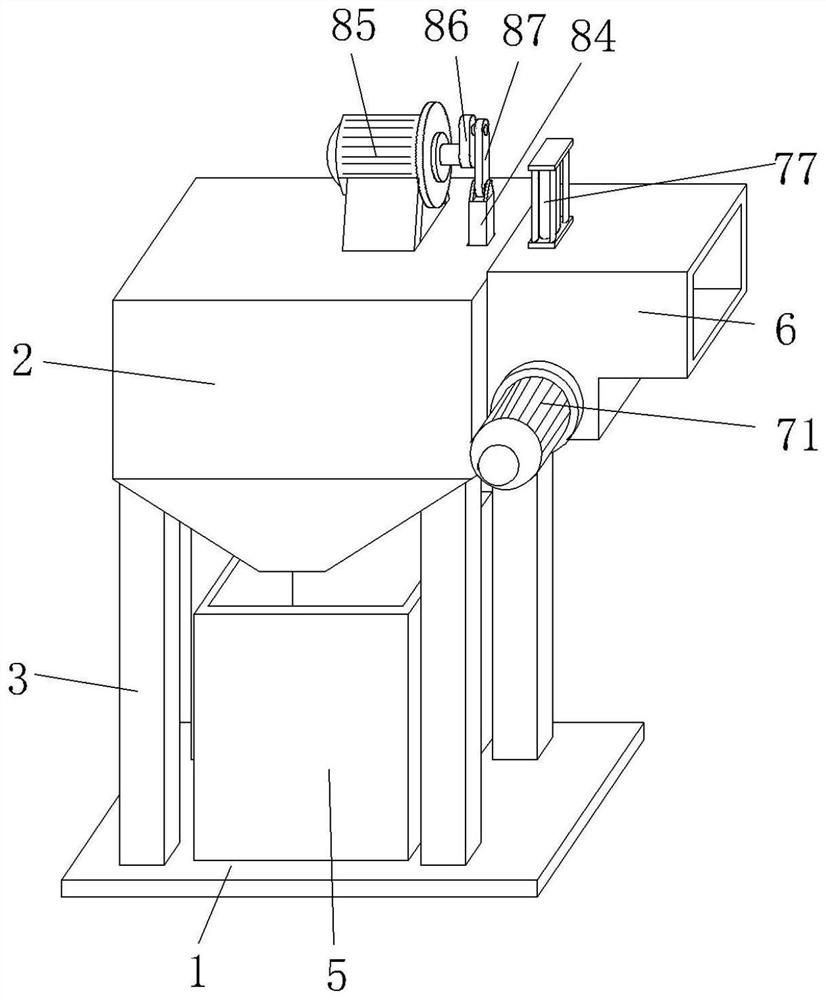
图1为本发明的结构示意图;
图2为本发明切碎机构的结构示意图;
图3为本发明第一壳体的正面剖视图;
图4为本发明第二壳体的右侧剖视图。
图中:1、底座,2、第一壳体,3、立柱,4、粉碎装置,5、收料桶,6、 第二壳体,7、进料机构,71、减速电机,72、第一转动辊,73、滑块,74、 滑槽,75、U形板,76、第二转动辊,77、液压缸,8、切碎机构,81、导柱, 82、切刀,83、条形孔,84、插杆,85、电机,86、转动杆,87、连杆,9、 挡板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行 清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而 不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做 出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-4,本发明提供一种技术方案:一种可自动进料的农业牧草粉 碎装置,包括:底座1、第一壳体2、立柱3、粉碎装置4、收料桶5、第二壳 体6、进料机构7和切碎机构8,第一壳体2的底端四角均固定设置有立柱3, 且立柱3固定设置在底座1的顶端,粉碎装置4设置在第一壳体2的内腔底 端,粉碎装置4为现有技术,可对牧草进行粉碎加工,符合本案的粉碎装置 均可使用,收料桶5放置在底座1的底端,且收料桶5位于第一壳体2底端 出口处的正上方,收料桶5可对粉碎后的牧草进行收集,第二壳体6固定设 置在第一壳体2的一侧,第二壳体6的一侧与第一壳体2的内腔相通,且第 二壳体6的另一侧为贯通状,进料机构7设置在第二壳体6的内腔,切碎机 构8设置在第一壳体2的内腔一侧。
作为优选方案,更进一步的,第一壳体2的内腔从上至下向内侧倾斜设 置,以便于粉碎后的牧草落入进收料桶5内。
作为优选方案,更进一步的,第一壳体2的内腔一侧固定设置有挡板9, 在挡板9的支撑下可使牧草进入到粉碎装置4内。
作为优选方案,更进一步的,进料机构7包括:减速电机71、第一转动 辊72、滑块73、滑槽74、U形板75、第二转动辊76、液压缸77,减速电机 71固定设置在第二壳体6的前侧底端,减速电机71的输出端延伸进第二壳体 6的内腔并固定设置有第一转动辊72,减速电机71为现有技术,减速电机71 可驱动第一转动辊72绕自身轴线逆时针转动,符合本案的减速电机型号均可 使用,且第一转动辊72的一端与第二壳体6的内壁转动连接,第二壳体6的内腔前后两侧均沿上下方向开设有滑槽74,滑槽74的内腔插接有滑块73,U 形板75固定设置在滑块73的内侧,通过滑槽74和滑块73的配合可使U形 板75移动更稳定,第二转动辊76转动设置在U形板75的内侧,第二转动辊 76可绕自身轴线转动,液压缸77固定设置在第二壳体6的顶端,液压缸77 的底端延伸进第二壳体6的内腔并与U形板75的顶端固定连接,液压缸77 为现有技术,液压缸77可推动U形板75上下移动,符合本案的液压缸型号 均可使用。
作为优选方案,更进一步的,第二转动辊76位于第一转动辊72的正上 方,通过第一转动辊72和第二转动辊76的配合可对牧草进行平稳传递。
作为优选方案,更进一步的,挡板10的一侧延伸进第二壳体6的内腔, 且挡板10的上表面低于第一转动辊72的外壁顶端高度,以使牧草能够准确 的移动到挡板10上。
作为优选方案,更进一步的,切碎机构8包括:导柱81、切刀82和条形 孔83,挡板9的顶端前后两侧均固定设置有导柱81,导柱81的顶端固定设 置在第一壳体2的内腔顶端,导柱81的外壁套接有沿前后方向设置的切刀82, 通过设置有导柱81可使切刀82平稳的上下移动,挡板9的顶端沿前后方向 开设有条形孔83,且条形孔83位于切刀82的正下方,通过切刀82和条形孔 83的配合可对牧草进行切割。
作为优选方案,更进一步的,切碎机构8还包括插杆84、电机85、转动 杆86和连杆87,第一壳体2的顶端一侧插接有插杆84,且插杆84的底端延 伸进第一壳体2的内腔并与切刀82的顶端中部固定连接,插杆84可在第一 壳体2的顶端上下移动,电机85固定设置在第一壳体2的顶端,电机85的 输出端固定设置有转动杆86,电机85为现有技术,电机85可驱动转动杆86 绕自身轴线顺时针转动,符合本案的电机型号均可使用,转动杆86的外侧通 过销轴转动设置有连杆87的一端,且连杆87的另一端与插杆84的顶端转动 连接,转动杆86的另一端可带动连杆87做顺时针圆周运动,并使连杆87的 一端在插杆84和第一壳体2的限制作用下带动插杆84做上下往复移动,从 而在导柱81的限制作用下可使切刀82平稳的上下移动。
其详细连接手段,为本领域公知技术,下述主要介绍工作原理以及过程, 具体工作如下。
步骤一:启动粉碎装置4,接通减速电机71、液压缸77和电机85的外 接电源,控制电机85启动后,电机85可驱动转动杆86绕自身轴线顺时针转 动,从而可使转动杆86的一端绕着电机85的输出端做顺时针圆周运动,转 动杆86的另一端可带动连杆87做顺时针圆周运动,并使连杆87的一端在插 杆84和第一壳体2的限制作用下带动插杆84做上下往复移动,从而在导柱 81的限制作用下可使切刀82平稳的上下移动;
步骤二:控制减速电机71启动,在减速电机71的驱动下可控制第一转 动辊72绕自身轴线逆时针转动,从而第一转动辊72对放置在第一转动辊72 外壁上的牧草进行传递,将牧草伸入进第二壳体6内,并放置在第一转动辊 72的外壁上,控制液压缸77启动,液压缸77可推动U形板75在滑槽74和 滑块73的限制下竖直向下移动,以使第二转动辊76向下移动,并在第二转 动辊76和第一转动辊72的相互挤压下对牧草进行压紧固定,并在第一转动 辊72的转动作用下可使牧草向第一壳体2内移动;
步骤三:控制牧草向第一壳体2内移动后,当牧草移动到切刀82的下方 后,通过控制切刀82上下移动并与条形孔83相配合,可对目前进行连续的 切割,切割成段后的牧草在挡板9的倾斜下可进入到粉碎装置4内,并通过 粉碎装置4进行粉碎,以使粉碎更加彻底,彻底粉碎后的牧草通过第一壳体2 的底端落入进收料桶5内进行收集,提高了牧草的粉碎质量,且节省了工作 人员的精力和体力,安全性较高,有利于广泛推广。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而 言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行 多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限 定。