一种存在互耦条件下基于多普勒频移的直接定位方法
文献发布时间:2023-06-19 09:26:02
技术领域
本发明属于信号处理领域,具体涉及一种定位方法。
背景技术
基于多普勒频移的直接定位系统,如图2所示,有若干个目标信源,一个运动的天线阵列在若干个时隙内不同位置上接收目标辐射的信号,联合分析若干个时隙内接收到的信号,对目标信源的位置进行估计。
对于多站定位静止目标问题,通常使用时延参数对目标进行定位,但是这种方法要求多个接收站之间时间同步,当信号带宽较窄时,这种方法很难达到较高的时间同步精度,而此时可以得到较高的频差进度,因此基于多普勒频移的直接定位技术是目前电子侦察中的重要技术之一。
当前基于多普勒频移的直接定位算法,可以在忽略天线阵列阵元间相互作用的条件下,准确估计出目标信源的位置。但是,在实际应用环境中,天线阵列存在互耦误差,并且阵元间距越小,互耦效应越显著。所以,阵元互耦误差在实际应用中不应该被忽视。
发明内容
为了克服现有技术的不足,本发明提供了一种存在互耦条件下基于多普勒频移的直接定位方法,通过利用一个运动单站在沿L型轨迹运动时,在K个时隙内阵列天线接收数据直接估计目标信源的位置坐标。首先,建立存在互耦条件下基于多普勒频移信息的运动单站多时隙阵列信号模型;然后,使用基于秩损法和阵列互耦矩阵结构的算法,初步估计目标信源的位置坐标;使用初步估计出的目标信源位置,估计出阵列互耦系数;估计出阵列的互耦系数后,使用MUSIC算法估计出更准确的目标信源的位置。相比于已有的运动多站定位方法,本发明提供的方法可以解决存在互耦条件下的直接定位问题,显著提高对目标的定位精度,尤其是可以提高阵列的自由度,在超自由度的直接定位问题中,该定位方法精度优势更加明显。
本发明解决其技术问题所采用的技术方案包括以下步骤:
步骤1:假设:运动单站是由M个阵元构成的均匀直线阵;运动单站沿L型轨迹运动,在K个观测间隙内运动单站对Q个静止目标信源进行检测;目标信源发射载频为f
定义目标信源位置坐标为p
步骤2:按照预设的采样信号时域模型得到目标信源K个时隙的时域数据,生成第n个采样时刻的观测模型为:
式中,T
C为互耦矩阵,形式是呈带状对称的Toeplitz矩阵,互耦长度为l,表示如式(2)
式中,[c
定义互耦系数向量c=[c
阵列流型和多普勒频移与目标信源位置之间的代数关系式分别为式(3)和式(4):
其中,d表示运动单站阵元间距,λ表示窄带信号波长,
假定同一时隙中运动单站的天线阵列接收目标信源发射的窄带信号角度和多普勒频移保持不变;定义如下向量:
式中,g
x
步骤3:定义运动单站在第k个时隙内接收到信号的协方差矩阵为:
式中,E[·]表示求期望,(·)
式中,U
步骤4:定义存在互耦的阵列流型a
计算:
其中,I
式中,
其中,m=1,2,…,l-1;
根据子空间原理,入射信号的导向矢量正交于噪声子空间,则有:
假设
其中,
采用下面函数对目标信源的位置进行估计:
P(p)的Q个最大峰值对应的坐标即为估计的所求目标信源的初次求解位置,用
步骤5:定义υ=[υ
定义α的估计值为
其中,
令
当1≤i≤l-1时,式(14)写为:
[f
则能用下式估计运动单站的互耦系数向量:
c=F
其中,
步骤6:得到互耦系数向量c后,采用MUSIC算法进一步估计出目标信源的准确位置:
其中,
本发明具有以下有益效果:
本发明提供的一种存在互耦条件下基于多普勒频移的直接定位方法可以解决存在互耦条件下的直接定位问题,同时多普勒频移信息的引入可以明显提高对目标的定位精度,尤其是可以提高阵列的自由度;在超自由度的直接定位问题中,该定位精度优势更加明显。
附图说明
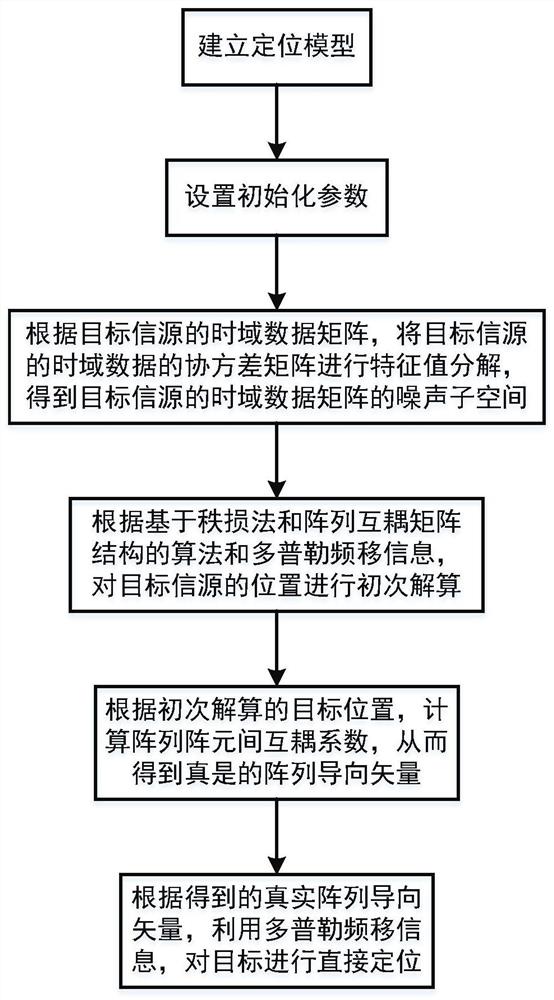
图1为本发明方法的定位流程示意图。
图2为本发明方法的原理示意图。
图3为本发明实施例运动单站多时隙观测的定位场景示意图。
图4为本发明实施例互耦系数估计的均方根误差随信噪比的变化曲线。
图5为本发明实施例的目标定位均方根误差随信噪比的变化曲线。
图6为本发明实施例超自由度情况下运动单站多时隙观测的定位场景示意图。
图7为本发明实施例超自由度情况下互耦系数估计的均方根误差随信噪比的变化曲线。
图8为本发明实施例超自由度情况下目标定位均方根误差随信噪比的变化曲线。
具体实施方式
下面结合附图和实施例对本发明进一步说明。
如图1所示,一种存在互耦条件下基于多普勒频移的直接定位方法,包括以下步骤:
步骤1:假设:运动单站是由M个阵元构成的均匀直线阵;运动单站沿L型轨迹运动,在K个观测间隙内运动单站对Q个静止目标信源进行检测;目标信源发射载频为f
定义目标信源位置坐标为p
步骤2:按照预设的采样信号时域模型得到目标信源K个时隙的时域数据,生成第n个采样时刻的观测模型为:
式中,T
C为互耦矩阵,建立均匀线阵的互耦模型时,形式是呈带状对称的Toeplitz矩阵,互耦长度为l,表示如式(2)
式中,[c
定义互耦系数向量c=[c
阵列流型和多普勒频移与目标信源位置之间的代数关系式分别为式(3)和式(4):
其中,d表示运动单站阵元间距,λ表示窄带信号波长,
天线阵列在K个时隙内不同位置上接收目标辐射的信号,假定同一时隙中运动单站的天线阵列接收目标信源发射的窄带信号角度和多普勒频移保持不变;定义如下向量:
式中,g
x
步骤3:定义运动单站在第k个时隙内接收到信号的协方差矩阵为:
式中,E[·]表示求期望,(·)
式中,U
步骤4:定义存在互耦的阵列流型a
计算:
其中,I
式中,
其中,m=1,2,…,l-1;
根据子空间原理,入射信号的导向矢量正交于噪声子空间,则有:
假设
其中,
通常,Q(p)是一个满秩矩阵,但是当p=p
在移动区域内对x和y进行搜索,P(p)的Q个最大峰值对应的坐标即为估计的所求目标信源的初次求解位置,用
步骤5:定义υ=[υ
定义α的估计值为
其中,
令
当1≤i≤l-1时,式(14)写为:
[f
则能用下式估计运动单站的互耦系数向量:
c=F
其中,
步骤6:得到互耦系数向量c后,采用MUSIC算法进一步估计出目标信源的准确位置:
其中,
具体实施例:
初始化参数,设置运动单站为阵元数M=4的均匀线阵,在K=5个观测时隙内接收Q=2个目标信源发射的信号,如图3所示。
两个目标信源的真实位置分别为(5,25)和(-5,35),运动单站在各个观测时隙的位置为(-15,15),(0,15),(15,15),(15,30)和(15,45)。互耦长度为2,已知互耦系数向量为c=[1,0.1545+0.4755i],快拍数N=200。
信信噪比的变化范围为从-5dB开始以2dB为间隔增长到15dB。进行500次蒙特卡洛实验,并对估计出的目标信源位置和互耦矩阵求解其随信噪比变化的均方根误差(RMSE),其均方根误差公式分别为
其中,
采用本发明方法可以估计出目标信源的位置及互耦矩阵,图4为估计互耦系数的RMSE
在超自由度情况下,也就是目标信源的个数大于等于运动单站阵元数的情况下,设置如下参数,运动单站为阵元数M=4的均匀线阵,在K=5个观测时隙内接收Q=4个目标信源发射的信号,如图6所示。
目标信源的真实位置分别为(5,25),(-5,35),(5,35)和(-5,25),运动单站在各个观测时隙的位置为(-15,15),(0,15),(15,15),(15,30)和(15,45)。互耦长度为2,已知互耦系数向量为c=[1,0.1545+0.4755i],快拍数N=200。
图7为超自由度情况下估计互耦系数的RMSE