组合链轮
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及一种轮子,特别是组合链轮,其将多个轮子及链带组合在一起,在轮子上设置压力传感器、速度传感器,在连接装置上设置蓄电池、本体传感器、中央控制系统、陀螺系统,解决了独轮平衡车、赛格威车等越障能力不足、安全感不高、无法急刹车,小型载运设备越障能力不足、滚阻系数大,越野型车辆颠簸过大的问题,实现了各种载运设备在不平坦不连续路面的平稳高效安全行驶。
背景技术
随着新型智能载运设备的日渐普及,独轮平衡车、赛格威车等开始步入大众视野,新颖独特的设计、小型化便于携带、可以直接进入商场及地铁的优点,吸引了很多人的目光,但由于其轮子的设计还局限于传统的圆形车轮,存在安全冗余小、不能急刹车等问题,至今被很多国家或地区禁止上人行道,成为其大规模普及的巨大障碍;随着载运设备小型化的发展,小型、超小型载运设备,给人们的出行带来了巨大的方便,但由于其轮径小且通常在不很平坦的人行道上行驶,有时还需要跨越不连续路面及小台阶,轮径小导致越障能力不足、滚阻系数大的缺点也非常突出;越野型车辆经常运行在凸凹不平的路面,目前的圆形车轮设计是其速度和平稳性提高的巨大瓶颈。
本发明就是解决以上所有问题的一个解决方案。
发明内容
本发明的目的是,通过在主承重链轮或主承重轮前方设置越障链轮和或越野链轮及越野轮,在主承重链轮或主承重轮后方设置越野链轮或越野轮,在链轮上设置链带,越野链轮也可围绕旋转轴转动,在部分或全部轮子上设置压力传感器、速度传感器,在连接板或壳体上设置蓄电池、本体传感器、中央控制系统、陀螺系统解决了上述问题。
本发明的作用:1、主承重链轮或主承重轮在大部分时间内承受全部或大部分载荷,主承重链轮或主承重轮的轮径通常大于越野链轮、越野轮和越障链轮,在实现运载工具小型化的同时尽量不增大滚动摩擦系数,当部分或全部轮子为电动链轮毂或电动轮毂时,本发明可以成为载运设备的驱动轮,并根据指令加速或减速、调整本发明与水平面的夹角。2、越野链轮及链带可帮助载运设备通过不平坦或不连续路面(如行驶在人行道,上下地铁等),减少越野型车辆的颠簸,增加了独轮平衡车和赛格威车等载运设备维持平衡的手段,增加稳定性冗余(特别是在上下车、停车、超低速行进、上下小台阶时),使急刹车成为可能,同时降低控制系统的软硬件要求。3、越障链轮及链带可帮助载运设备通过越过突出路面的障碍物(如马路牙子等),在实现运载工具小型化的同时保持与大轮径车接近的越障能力。4、连接件或壳体使得主承重链轮或主承重轮、越野链轮或越野轮、越障链轮、蓄电池、本体传感器、中央控制系统、陀螺系统、压力传感器、速度传感器、旋转轴等成为一个整体,并减少异物进入。5、蓄电池可给电动链轮毂、电动轮毂、本体传感器、中央控制系统、陀螺系统、压力传感器、速度传感器等提供电能。6、本体传感器可感知本发明的姿态和加速状态等信息,并将本发明的状态信息输出给中央控制系统。7、中央控制系统接受从本体传感器、压力传感器、速度传感器、陀螺系统传来的信息及外界输入的指令,综合分析处理后,向电动轮毂及陀螺系统等发出控制命令,调整本发明状态,实现驾驶者的意图,并保持运载工具的平衡。8、陀螺系统根据中央控制系统的控制命令调整本发明的行进方向和倾斜度,并将自身状态信息输出给中央控制系统。9、压力传感器感知各个轮轴的压力,并将轴压信息输出给中央控制系统。10、速度传感器感知本发明的行进速度,并将速度信息输出给中央控制系统。11、旋转轴可使主承重链轮或主承重轮前方的越障链轮和部分或全部越野链轮以该轴为中心旋转,调整本发明的行进方向。
本发明的目的是这样实现的:主承重链轮或主承重轮在大部分时间内承受全部或大部分载荷,主承重链轮或主承重轮的轮径通常大于越野链轮、越野轮和越障链轮,当部分或全部轮子为电动链轮毂或电动轮毂时,本发明可以成为载运设备的驱动轮,并根据指令加速或减速、调整本发明与水平面的夹角,在主承重链轮或主承重轮前方设置越障链轮和或越野链轮或越野轮,在主承重链轮或主承重轮后方设置越野链轮或越野轮,在链轮上设置链带,用连接件或壳体连接主承重链轮或主承重轮、越野链轮或越野轮、越障链轮、蓄电池、本体传感器、中央控制系统、陀螺系统、压力传感器、速度传感器、旋转轴,蓄电池对电动链轮毂、电动轮毂、本体传感器、中央控制系统、陀螺系统、压力传感器、速度传感器等提供电能,本体传感器感知本发明的姿态和加速状态等信息,并将本发明的状态信息输出给中央控制系统,中央控制系统接受从本体传感器、压力传感器、速度传感器、陀螺系统传来的信息及外界输入的指令,综合分析处理后,向电动轮毂及陀螺系统等发出控制命令,调整本发明状态,实现驾驶者的意图,并保持运载工具的平衡,陀螺系统根据中央控制系统的控制命令调整本发明的行进方向和倾斜度,并将自身状态信息输出给中央控制系统,压力传感器感知各个轮轴的压力,并将轴压信息输出给中央控制系统,速度传感器感知本发明的行进速度,并将速度信息输出给中央控制系统,旋转轴使主承重链轮或主承重轮前方的越障链轮和部分或全部越野链轮以该轴为中心旋转,调整本发明的行进方向。
附图说明
下面结合附图对本发明作进一步详细地描述。
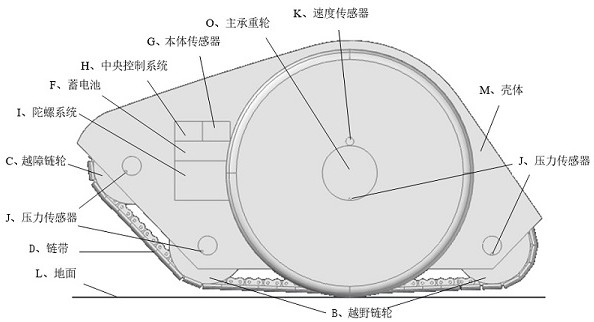
图1是本发明的具体实施方式1的前视图示意图。
图2是本发明的具体实施方式1的西南等轴测图示意图。
图3是本发明的具体实施方式1的东北等轴测图示意图。
图4是本发明的具体实施方式2的前视图示意图。
图5是本发明的具体实施方式2的西南等轴测图示意图。
图6是本发明的具体实施方式2的东北等轴测图示意图。
图7是本发明的具体实施方式3的前视图示意图。
图8是本发明的具体实施方式3的西南等轴测图示意图。
图9是本发明的具体实施方式3的东北等轴测图示意图。
图10是本发明的具体实施方式4的前视图示意图。
图11是本发明的具体实施方式4的西南等轴测图示意图。
图12是本发明的具体实施方式4的东北等轴测图示意图。
图13是本发明的具体实施方式5的前视图示意图。
图14是本发明的具体实施方式5的西南等轴测图示意图。
图15是本发明的具体实施方式5的东北等轴测图示意图。
图16是本发明的具体实施方式6的前视图示意图。
图17是本发明的具体实施方式6的西南等轴测图示意图。
图18是本发明的具体实施方式6的东北等轴测图示意图。
图19是本发明的具体实施方式7的前视图示意图。
图20是本发明的具体实施方式7的西南等轴测图示意图。
图21是本发明的具体实施方式7的东北等轴测图示意图。
图22是本发明的具体实施方式8的前视图示意图。
图23是本发明的具体实施方式8的西南等轴测图示意图。
图24是本发明的具体实施方式8的东北等轴测图示意图。
图25是本发明的具体实施方式9的前视图示意图。
图26是本发明的具体实施方式9的西南等轴测图示意图。
图27是本发明的具体实施方式9的东北等轴测图示意图。
图28是本发明的具体实施方式10的前视图示意图。
图29是本发明的具体实施方式10的西南等轴测图示意图。
图30是本发明的具体实施方式10的东北等轴测图示意图。
图中:
A、主承重链轮
B、越野链轮
C、越障链轮
D、链带
E、连接件
F、蓄电池
G、本体传感器
H、中央控制系统
I、陀螺系统
J、压力传感器
K、速度传感器
L、地面
M、壳体
N、越野轮
O、主承重轮
P、旋转轴
具体实施方式
1.一种组合链轮,包含一个以上(包含一个)主承重链轮(A)或主承重轮(O)、零个以上(包含零个)越野链轮(B)或越野轮(N)和零个以上(包含零个)越障链轮(C),越野链轮(B)或越野轮(N)和越障链轮(C)数量之和大于等于1,越野链轮(B)或越野轮(N)、越障链轮(C)的直径小于等于主承重链轮(A)或主承重轮(O)的直径,主承重链轮(A)或主承重轮(O)、越野链轮(B)或越野轮(N)、越障链轮(C)之间通过连接件(E)或壳体(M)及零个以上(包含零个)旋转轴(P)连接成为一个整体,越障链轮(C)抬离地面,主承重链轮(A)或主承重轮(O)、越野链轮(B)或越野轮(N)、越障链轮(C)上设置有零个以上(包含零个)压力传感器(J),主承重链轮(A)或主承重轮(O)上设置有零个以上(包含零个)速度传感器(K),连接件(E)或壳体(M)上设置零个以上(包含零个)蓄电池(F)、零个以上(包含零个)本体传感器(G)、零个以上(包含零个)中央控制系统(H)、零个以上(包含零个)陀螺系统(I),主承重链轮(A)、越野链轮(B)、越障链轮(C)上设置链带(D)。
2.一种组合链轮,包含一个以上(包含一个)主承重链轮(A)、零个以上(包含零个)越野链轮(B)和零个以上(包含零个)越障链轮(C),越野链轮(B)和越障链轮(C)数量之和大于等于1,越野链轮(B)、越障链轮(C)的直径小于等于主承重链轮(A)的直径,主承重链轮(A)、越野链轮(B)、越障链轮(C)之间通过连接件(E)或壳体(M)连接成为一个整体,越障链轮(C)抬离地面,主承重链轮(A)、越野链轮(B)、越障链轮(C)上设置有零个以上(包含零个)压力传感器(J),主承重链轮(A)上设置有零个以上(包含零个)速度传感器(K),连接件(E)或壳体(M)上设置零个以上(包含零个)蓄电池(F)、零个以上(包含零个)本体传感器(G)、零个以上(包含零个)中央控制系统(H)、零个以上(包含零个)陀螺系统(I),主承重链轮(A)、越野链轮(B)、越障链轮(C)上设置链带(D)。
3.一种组合链轮,包含一个以上(包含一个)主承重轮(O),主承重轮(O)前方设置一个以上(包含一个)越野链轮(B)和一个以上(包含一个)越障链轮(C),主承重轮(O)后方设置零个以上(包含零个)越野轮(N),越野链轮(B)、越障链轮(C)、越野轮(N)的直径小于等于主承重轮(O)的直径,主承重轮(O)、越野链轮(B)、越野轮(N)、越障链轮(C)之间通过连接件(E)或壳体(M)连接成为一个整体,越障链轮(C)抬离地面,主承重轮(O)、越野链轮(B)、越障链轮(C)、越野轮(N)上设置有零个以上(包含零个)压力传感器(J),主承重轮(O)上设置有零个以上(包含零个)速度传感器(K),连接件(E)或壳体(M)上设置零个以上(包含零个)蓄电池(F)、零个以上(包含零个)本体传感器(G)、零个以上(包含零个)中央控制系统(H)、零个以上(包含零个)陀螺系统(I),越野链轮(B)、越障链轮(C)上设置链带(D)。
4.一种组合链轮,包含一个以上(包含一个)主承重轮(O)、零个以上(包含零个)越野链轮(B)和零个以上(包含零个)越障链轮(C),越野链轮(B)和越障链轮(C)数量之和大于等于2,越野链轮(B)、越障链轮(C)的直径小于等于主承重轮(O)的直径,主承重轮(O)、越野链轮(B)、越障链轮(C)之间通过连接件(E)或壳体(M)连接成为一个整体,越障链轮(C)抬离地面,主承重轮(O)、越野链轮(B)、越障链轮(C)上设置有零个以上(包含零个)压力传感器(J),主承重轮(O)上设置有零个以上(包含零个)速度传感器(K),连接件(E)或壳体(M)上设置零个以上(包含零个)蓄电池(F)、零个以上(包含零个)本体传感器(G)、零个以上(包含零个)中央控制系统(H)、零个以上(包含零个)陀螺系统(I),越野链轮(B)、越障链轮(C)上设置链带(D)。
5.一种组合链轮,包含一个以上(包含一个)主承重链轮(A)或主承重轮(O)、主承重链轮(A)或主承重轮(O)的前方设置一个以上(包含一个)越野链轮(B)和一个以上(包含一个)越障链轮(C),越野链轮(B)、越障链轮(C)上设置链带(D),主承重链轮(A)或主承重轮(O)的后方设置一个以上(包含一个)越野链轮(B)或越野轮(N),主承重链轮(A)、越野链轮(B)上设置链带(D),越野链轮(B)或越野轮(N)、越障链轮(C)的直径小于等于主承重链轮(A)或主承重轮(O)的直径,主承重链轮(A)或主承重轮(O)前方的越野链轮(B)、越障链轮(C)之间通过前方的连接件(E)或壳体(M)连接成为一个整体,主承重链轮(A)或主承重轮(O)与其后方的越野链轮(B)或越野轮(N)通过后方的连接件(E)或壳体(M)连接成为一个整体,前后方的连接件(E)或壳体(M)通过旋转轴(P)连接成为一个整体,越障链轮(C)抬离地面,主承重链轮(A)或主承重轮(O)、越野链轮(B)或越野轮(N)、越障链轮(C)上设置有零个以上(包含零个)压力传感器(J),主承重链轮(A)或主承重轮(O)上设置有零个以上(包含零个)速度传感器(K),连接件(E)或壳体(M)上设置零个以上(包含零个)蓄电池(F)、零个以上(包含零个)本体传感器(G)、零个以上(包含零个)中央控制系统(H)、零个以上(包含零个)陀螺系统(I)。
6.一种组合链轮,包含两个以上(包含两个)主承重链轮(A)、零个以上(包含零个)越野链轮(B)和零个以上(包含零个)越障链轮(C),越野链轮(B)、越障链轮(C)的直径小于等于主承重链轮(A)的直径,主承重链轮(A)、越野链轮(B)和越障链轮(C)之间通过连接件(E)或壳体(M)连接成为一个整体,越障链轮(C)抬离地面,主承重链轮(A)、越野链轮(B)、越障链轮(C)上设置链带(D)。
7.所述主承重链轮(A)或主承重轮(O)和或越野链轮(B)和或越障链轮(C)的部分或者全部为电动链轮毂。
8.所述越野链轮(B)或越野轮(N)的部分或者全部抬离地面(L)。
9、在主承重链轮(A)的前方设置一个越野链轮(B)和一个越障链轮(C),在主承重链轮(A)的后方设置一个越野链轮(B),主承重链轮(A)的轮径大于越野链轮(B)和越障链轮(C),主承重链轮(A)为电动链轮毂,主承重链轮(A)、两个越野链轮(B)和越障链轮(C)通过连接件(E)连接成一个整体,主承重链轮(A)、两个越野链轮(B)和越障链轮(C)环绕着链带(D),主承重链轮(A)、两个越野链轮(B)和越障链轮(C)的轮轴上设置压力传感器(J),主承重链轮(A)的轮轴上设置速度传感器(K),两个越野链轮(B)稍微抬离地面(L),越障链轮(C)抬离地面(L),连接件(E)上设置有蓄电池(F)、本体传感器(G)、中央控制系统(H)、陀螺系统(I),主承重链轮(A)根据来自中央控制系统(H)的指令加速或减速及调整本发明与水平面的夹角,蓄电池(F)对主承重链轮(A)、本体传感器(G)、中央控制系统(H)、陀螺系统(I)、压力传感器(J)、速度传感器(K)提供电能,本体传感器(G)感知本发明的姿态和加速状态等信息,并将本发明的状态信息输出给中央控制系统(H),中央控制系统(H)接受从本体传感器(G)、压力传感器(J)、速度传感器(K)、陀螺系统(I)传来的信息及外界输入的指令,综合分析处理后,向主承重链轮(A)及陀螺系统(I)发出控制命令,陀螺系统(I)根据中央控制系统(H)的控制命令调整本发明的行进方向和倾斜度,并将自身状态信息输出给中央控制系统(H),压力传感器(J)感知各个轮轴的压力,并将轴压信息输出给中央控制系统(H),速度传感器(K)感知本发明的行进速度,并将速度信息输出给中央控制系统(H)。
10、在主承重链轮(A)的前方设置一个越野链轮(B)和一个越障链轮(C),在主承重链轮(A)的后方设置一个越野链轮(B),主承重链轮(A)的轮径大于越野链轮(B)和越障链轮(C),主承重链轮(A)为电动链轮毂,主承重链轮(A)、两个越野链轮(B)和越障链轮(C)通过壳体(M)连接成一个整体,主承重链轮(A)、两个越野链轮(B)和越障链轮(C)环绕着链带(D),主承重链轮(A)、两个越野链轮(B)和越障链轮(C)的轮轴上设置压力传感器(J),主承重链轮(A)的轮轴上设置速度传感器(K),两个越野链轮(B)稍微抬离地面(L),越障链轮(C)抬离地面(L),壳体(M)上设置有蓄电池(F)、本体传感器(G)、中央控制系统(H)、陀螺系统(I),主承重链轮(A)根据来自中央控制系统(H)的指令加速或减速及调整本发明与水平面的夹角,蓄电池(F)对主承重链轮(A)、本体传感器(G)、中央控制系统(H)、陀螺系统(I)、压力传感器(J)、速度传感器(K)提供电能,本体传感器(G)感知本发明的姿态和加速状态等信息,并将本发明的状态信息输出给中央控制系统(H),中央控制系统(H)接受从本体传感器(G)、压力传感器(J)、速度传感器(K)、陀螺系统(I)传来的信息及外界输入的指令,综合分析处理后,向主承重链轮(A)及陀螺系统(I)发出控制命令,陀螺系统(I)根据中央控制系统(H)的控制命令调整本发明的行进方向和倾斜度,并将自身状态信息输出给中央控制系统(H),压力传感器(J)感知各个轮轴的压力,并将轴压信息输出给中央控制系统(H),速度传感器(K)感知本发明的行进速度,并将速度信息输出给中央控制系统(H)。
11、在主承重轮(O)的前方设置一个越野链轮(B)和一个越障链轮(C),在主承重轮(O)的后方设置一个越野轮(N),主承重轮(O)的轮径大于越野链轮(B)和越障链轮(C),主承重轮(O)为电动轮毂,主承重轮(O)、越野链轮(B)、越野轮(N)和越障链轮(C)通过壳体(M)连接成一个整体,越野链轮(B)和越障链轮(C)环绕着链带(D),主承重轮(O)、越野链轮(B)、越野轮(N)和越障链轮(C)的轮轴上设置压力传感器(J),主承重轮(O)的轮轴上设置速度传感器(K),越野链轮(B)和越野轮(N)稍微抬离地面(L),越障链轮(C)抬离地面(L),壳体(M)上设置有蓄电池(F)、本体传感器(G)、中央控制系统(H)、陀螺系统(I),主承重轮(O)根据来自中央控制系统(H)的指令加速或减速及调整本发明与水平面的夹角,蓄电池(F)对主承重轮(O)、本体传感器(G)、中央控制系统(H)、陀螺系统(I)、压力传感器(J)、速度传感器(K)提供电能,本体传感器(G)感知本发明的姿态和加速状态等信息,并将本发明的状态信息输出给中央控制系统(H),中央控制系统(H)接受从本体传感器(G)、压力传感器(J)、速度传感器(K)、陀螺系统(I)传来的信息及外界输入的指令,综合分析处理后,向主承重轮(O)及陀螺系统(I)发出控制命令,陀螺系统(I)根据中央控制系统(H)的控制命令调整本发明的行进方向和倾斜度,并将自身状态信息输出给中央控制系统(H),压力传感器(J)感知各个轮轴的压力,并将轴压信息输出给中央控制系统(H),速度传感器(K)感知本发明的行进速度,并将速度信息输出给中央控制系统(H)。
12、在主承重轮(O)的前方设置一个越野链轮(B)和一个越障链轮(C),在主承重轮(O)的旁边及后方各设置一个越野链轮(B),主承重轮(O)的轮径大于越野链轮(B)和越障链轮(C),主承重轮(O)为电动轮毂,主承重轮(O)、三个越野链轮(B)和越障链轮(C)通过壳体(M)连接成一个整体,三个越野链轮(B)和越障链轮(C)环绕着链带(D),主承重轮(O)、三个越野链轮(B)和越障链轮(C)的轮轴上设置压力传感器(J),主承重轮(O)的轮轴上设置速度传感器(K),三个越野链轮(B)稍微抬离地面(L),越障链轮(C)抬离地面(L),壳体(M)上设置有蓄电池(F)、本体传感器(G)、中央控制系统(H)、陀螺系统(I),主承重轮(O)根据来自中央控制系统(H)的指令加速或减速及调整本发明与水平面的夹角,蓄电池(F)对主承重轮(O)、本体传感器(G)、中央控制系统(H)、陀螺系统(I)、压力传感器(J)、速度传感器(K)提供电能,本体传感器(G)感知本发明的姿态和加速状态等信息,并将本发明的状态信息输出给中央控制系统(H),中央控制系统(H)接受从本体传感器(G)、压力传感器(J)、速度传感器(K)、陀螺系统(I)传来的信息及外界输入的指令,综合分析处理后,向主承重轮(O)及陀螺系统(I)发出控制命令,陀螺系统(I)根据中央控制系统(H)的控制命令调整本发明的行进方向和倾斜度,并将自身状态信息输出给中央控制系统(H),压力传感器(J)感知各个轮轴的压力,并将轴压信息输出给中央控制系统(H),速度传感器(K)感知本发明的行进速度,并将速度信息输出给中央控制系统(H)。
13、在主承重链轮(A)的前方设置一个越野链轮(B)和一个越障链轮(C),在主承重链轮(A)的后方设置一个越野链轮(B),主承重链轮(A)的轮径大于越野链轮(B)和越障链轮(C),主承重链轮(A)为电动轮毂,主承重链轮(A)、越野链轮(B)和越障链轮(C)通过前后两个壳体(M)及旋转轴(P)连接成一个整体,主承重链轮(A)的前方的越野链轮(B)和越障链轮(C)环绕着一条链带(D),主承重链轮(A)和后方的越野链轮(B)环绕着另一条链带(D),主承重链轮(A)、越野链轮(B)和越障链轮(C)的轮轴上设置压力传感器(J),主承重链轮(A)的轮轴上设置速度传感器(K),主承重链轮(A)前方的越野链轮(B)接触地面,主承重链轮(A)后方的越野链轮(B)稍微抬离地面(L),越障链轮(C)抬离地面(L),后方壳体(M)上设置有蓄电池(F)、本体传感器(G)、中央控制系统(H)、陀螺系统(I),主承重链轮(A)根据来自中央控制系统(H)的指令加速或减速及调整本发明与水平面的夹角,蓄电池(F)对主承重链轮(A)、本体传感器(G)、中央控制系统(H)、陀螺系统(I)、压力传感器(J)、速度传感器(K)提供电能,本体传感器(G)感知本发明的姿态和加速状态等信息,并将本发明的状态信息输出给中央控制系统(H),中央控制系统(H)接受从本体传感器(G)、压力传感器(J)、速度传感器(K)、陀螺系统(I)传来的信息及外界输入的指令,综合分析处理后,向主承重链轮(A)及陀螺系统(I)发出控制命令,陀螺系统(I)根据中央控制系统(H)的控制命令调整本发明的行进方向和倾斜度,并将自身状态信息输出给中央控制系统(H),压力传感器(J)感知各个轮轴的压力,并将轴压信息输出给中央控制系统(H),速度传感器(K)感知本发明的行进速度,并将速度信息输出给中央控制系统(H)。
14、在主承重链轮(A)的前方设置一个越障链轮(C),在主承重链轮(A)的后方设置一个越野链轮(B),主承重链轮(A)的轮径大于越野链轮(B)和越障链轮(C),主承重链轮(A)为电动链轮毂,主承重链轮(A)、越野链轮(B)和越障链轮(C)通过壳体(M)连接成一个整体,主承重链轮(A)、越野链轮(B)和越障链轮(C)环绕着链带(D),主承重链轮(A)、越野链轮(B)和越障链轮(C)的轮轴上设置压力传感器(J),主承重链轮(A)的轮轴上设置速度传感器(K),越野链轮(B)稍微抬离地面(L),越障链轮(C)抬离地面(L),壳体(M)上设置有蓄电池(F)、本体传感器(G)、中央控制系统(H),主承重链轮(A)根据来自中央控制系统(H)的指令加速或减速及调整本发明与水平面的夹角,蓄电池(F)对主承重链轮(A)、本体传感器(G)、中央控制系统(H)、压力传感器(J)、速度传感器(K)提供电能,本体传感器(G)感知本发明的姿态和加速状态等信息,并将本发明的状态信息输出给中央控制系统(H),中央控制系统(H)接受从本体传感器(G)、压力传感器(J)、速度传感器(K)传来的信息及外界输入的指令,综合分析处理后,向主承重链轮(A)发出控制命令,压力传感器(J)感知各个轮轴的压力,并将轴压信息输出给中央控制系统(H),速度传感器(K)感知本发明的行进速度,并将速度信息输出给中央控制系统(H)。
15、在主承重链轮(A)的前后方各设置一个越野链轮(B),主承重链轮(A)的轮径大于越野链轮(B),主承重链轮(A)为电动链轮毂,主承重链轮(A)、两个越野链轮(B)通过壳体(M)连接成一个整体,主承重链轮(A)和两个越野链轮(B)环绕着链带(D),两个越野链轮(B)稍微抬离地面(L)。
16、在主承重链轮(A)的后方设置一个越野链轮(B),主承重链轮(A)的轮径大于越野链轮(B),主承重链轮(A)为电动链轮毂,主承重链轮(A)、越野链轮(B)通过壳体(M)连接成一个整体,主承重链轮(A)和越野链轮(B)环绕着链带(D),越野链轮(B)稍微抬离地面(L)。
17、在两个主承重链轮(A)的前方设置一个越野链轮(B)和一个越障链轮(C),在两个主承重链轮(A)的另一侧设置一个越野链轮(B),两个主承重链轮(A)、两个越野链轮(B)和越障链轮(C)通过壳体(M)连接成一个整体,两个越野链轮(B)稍微抬离地面(L),越障链轮(C)抬离地面(L),两个主承重链轮(A)、两个越野链轮(B)和越障链轮(C)环绕着链带(D)。
18、在两个主承重链轮(A)的两侧各设置一个越野链轮(B),两个主承重链轮(A)和两个越野链轮(B)通过壳体(M)连接成一个整体,两个越野链轮(B)稍微抬离地面(L),两个主承重链轮(A)和两个越野链轮(B)环绕着链带(D)。
- 链轮组合体及利用该链轮组合体的链轮装置
- 组合链轮机构以及具有这种组合链轮机构的后轮轴组件