驱动负载中间放置的上下对称磁悬浮电机及在四旋翼飞行器上的应用
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及应用于四旋翼飞行器的驱动机构,更特别地说,是指一种驱动负载中间放置的上下对称磁悬浮电机。
背景技术
近年来,随着磁悬浮技术的进步,高速磁悬浮电机迅速发展,其具有转速高(通常在10000rpm~60000rpm之间)、功率密度高、小体积、响应快和可直接驱动负载等优点。磁悬浮技术具体是指磁悬浮轴承(或称磁轴承)技术,是利用电磁力将转子悬浮起来,以代替传统的机械轴承支撑。磁轴承可以克服机械轴承擦损耗大的缺点,运行过程中转子无任何机械接触,无摩擦、无润滑,提高了机械寿命。
四旋翼飞行器以其灵活的飞行姿态、优越的悬停和低速性能受到广泛关注,一直是微型无人飞行器研究的热点。能够垂直起降、空中悬停,非常适合在有限的空间内进行作业,可以携带摄像机、测绘仪器、空中通信节点、微型杀伤性武器等装置,在人工操控或者自动控制下,以特定的航线和姿态飞行,完成相应的任务。在地震、泥石流等重大自然灾难的灾害评估及查险救援、电力系统巡线、航空成像及测绘等领域发挥了重大作用。
传统电机作为四旋翼飞行器的驱动力提供设备,由于电机自身的振动带来的扭矩扰动,以及传统电机转速受限于机械轴承的问题,降低了四旋翼飞行器的工作性能。
发明内容
为了解决传统四旋翼飞行器中应用传统电机驱动带来的转速受限于机械轴承问题和悬臂式旋翼带来的扭矩扰动问题,本发明设计了一种驱动负载中间放置的上下对称磁悬浮电机。该磁悬浮电机采用冗余驱动和磁轴承对称分布的设计方式,实现旋翼在高速旋转条件下的基轴稳定。
本发明设计了一种驱动负载中间放置的上下对称磁悬浮电机,上下对称磁悬浮电机是由结构相同的上磁悬浮电机和下磁悬浮电机构成。
上磁悬浮电机(1)包括有A机壳(1A)、A转轴(1B)、A转子永磁体(1P)、A径向磁轴承转子(1Q)、A电机定子(1C)、A线圈(1J)、A径向磁轴承定子(1D)、A径向磁轴承线圈(1M)、A轴向导磁环(1G)、A导磁环线圈(1K)、A推力盘(1H)、A探头群(1N)、A探头支架(1L)、A护套(1S)、A挡环(1T);
A探头群(1N)包括有2个轴向探头和4个径向探头,所述2个轴向探头是指AA轴向探头(1N1)、AB轴向探头(1N2),所述4个径向探头是指AA径向探头(1N3)、AB径向探头(1N4)、AC径向探头(1N5)、AD径向探头(1N6);A探头群(1N)中的探头分别安装在A探头支架(1L)上;A探头支架(1L)的轴向对称设有2个通孔,一个通孔内安装有AA轴向探头(1N1),另一个通孔内安装有AB轴向探头(1N2);在A探头支架(1L)的径向均匀设有4个通孔,第一个通孔用于安装AA径向探头(1N3),第二个通孔用于安装AB径向探头(1N4),第三个通孔用于安装AC径向探头(1N5),第四个通孔用于安装AD径向探头(1N6);A探头群(1N)用于探测A转轴(1B)运动后的位置;
A轴向导磁环(1G)的轴向设有一凹槽,凹槽内安装有A导磁环线圈(1K);
A电机定子(1C)的内部圆周上均匀分布有AA线圈骨架(1C1),相邻AA线圈骨架(1C1)之间是AA线圈沟槽(1C2),AA线圈沟槽(1C2)内放置有A线圈(1J);
A径向磁轴承定子(1D)的内部圆周上均匀分布有AB线圈骨架(1D1),相邻AB线圈骨架(1D1)之间是AB线圈沟槽(1D2),AB线圈沟槽(1D2)内放置有A径向磁轴承线圈(1M);
A转轴(1B)从一端至另一端顺次是连接段(1B1)、轴肩(1B4)、短轴段(1B2)和长轴段(1B3);A转轴(1B)的连接段(1B1)安装在A旋翼(11)的A旋翼连接柱(11A)的K通孔(11B)中,且A转轴(1B)的连接段(1B1)与B转轴(2B)的连接段(2B1)相对放置,共同置于所述K通孔(11B)中;A转轴(1B)的短轴段(1B2)上套接有A推力盘(1H)、A探头支架(1L),A探头支架(1L)的外圆面上套接有A轴向导磁环(1G);
A转轴(1B)的长轴段(1B3)上从一端至另一端顺次套接有A径向磁轴承转子(1Q)、AC隔套(1R)、A转子永磁体(1P),A转子永磁体(1P)的外圆面上套接有A护套(1S)、A挡环(1T);
A轴向导磁环(1G)与径向磁轴承定子(1D)之间是AB隔套(1F),径向磁轴承定子(1D)与A电机定子(1C)之间是AA隔套(1E);
A转子永磁体(1P)与A电机定子(1C)之间是A护套(1S);
A探头支架(1L)与A机壳(1A)之间是A轴向导磁环(1G);
A轴向导磁环(1G)、AB隔套(1F)、径向磁轴承定子(1D)、AA隔套(1E)和A电机定子(1C)的外部是A机壳(1A);
下磁悬浮电机(2)包括有B机壳(2A)、B转轴(2B)、B转子永磁体(2P)、B径向磁轴承转子(2Q)、B电机定子(2C)、B线圈(2J)、B径向磁轴承定子(2D)、B径向磁轴承线圈(2M)、B轴向导磁环(2G)、B导磁环线圈(2K)、B推力盘(2H)、B探头群(2N)、B探头支架(2L)、B护套(2S)、B挡环(2T);
B探头群(2N)包括有2个轴向探头和4个径向探头,所述2个轴向探头是指BA轴向探头(2N1)、BB轴向探头(2N2),所述4个径向探头是指BA径向探头(2N3)、BB径向探头(2N4)、BC径向探头(2N5)、BD径向探头(2N6);B探头群(2N)中的探头分别安装在B探头支架(2L)上;B探头支架(2L)的轴向对称设有2个通孔,一个通孔内安装有BA轴向探头(2N1),另一个通孔内安装有BB轴向探头(2N2);在B探头支架(2L)的径向均匀设有4个通孔,第一个通孔用于安装BA径向探头(2N3),第二个通孔用于安装BB径向探头(2N4),第三个通孔用于安装BC径向探头(2N5),第四个通孔用于安装BD径向探头(2N6);B探头群(2N)用于探测B转轴(2B)运动后的位置;
B轴向导磁环(2G)的轴向设有一凹槽,凹槽内安装有B导磁环线圈(2K);
B电机定子(2C)的内部圆周上均匀分布有BA线圈骨架(2C1),相邻BA线圈骨架(2C1)之间是BA线圈沟槽(2C2),BA线圈沟槽(2C2)内放置有B线圈(2J);
B径向磁轴承定子(2D)的内部圆周上均匀分布有BB线圈骨架(2D1),相邻BB线圈骨架(2D1)之间是BB线圈沟槽(2D2),BB线圈沟槽(2D2)内放置有B径向磁轴承线圈(2M);
B转轴(2B)从一端至另一端顺次是连接段(2B1)、轴肩(2B4)、短轴段(2B2)和长轴段(2B3);B转轴(2B)的连接段(2B1)安装在A旋翼(11)的A旋翼连接柱(11A)的K通孔(11B)中,且A转轴(1B)的连接段(1B1)与B转轴(2B)的连接段(2B1)相对放置,共同置于所述K通孔(11B)中;B转轴(2B)的短轴段(2B2)上套接有B推力盘(2H)、B探头支架(2L),B探头支架(2L)的外圆面上套接有B轴向导磁环(2G);
B转轴(2B)的长轴段(2B3)上从一端至另一端顺次套接有B径向磁轴承转子(2Q)、BC隔套(2R)、B转子永磁体(2P),B转子永磁体(2P)的外圆面上套接有B护套(2S)、B挡环(2T);
B轴向导磁环(2G)与B径向磁轴承定子(2D)之间是BB隔套(2F),径向磁轴承定子(2D)与B电机定子(2C)之间是BA隔套(2E);
B转子永磁体(2P)与B电机定子(2C)之间是B护套(2S);
B探头支架(2L)与B机壳(2A)之间是B轴向导磁环(2G);
B轴向导磁环(2G)、BB隔套(2F)、B径向磁轴承定子(2D)、BA隔套(2E)和B电机定子(2C)的外部是B机壳(2A)。
驱动负载中间放置的上下对称磁悬浮电机应用于四旋翼飞行器上,所述四旋翼飞行器至少有机身(10)、四个旋翼(11、13、15、17)和四个旋翼支架(12、14、16、18);其特征在于还包括有:第一组驱动负载中间放置的上下对称磁悬浮电机,所述第一组驱动负载中间放置的上下对称磁悬浮电机由A上磁悬浮电机(1)与A下磁悬浮电机(2)构成;
第二组驱动负载中间放置的上下对称磁悬浮电机,所述第一组驱动负载中间放置的上下对称磁悬浮电机由B上磁悬浮电机(3)与B下磁悬浮电机(4)构成;
第三组驱动负载中间放置的上下对称磁悬浮电机,所述第一组驱动负载中间放置的上下对称磁悬浮电机由C上磁悬浮电机(5)与C下磁悬浮电机(6)构成;
第四组驱动负载中间放置的上下对称磁悬浮电机,所述第一组驱动负载中间放置的上下对称磁悬浮电机由D上磁悬浮电机(7)与D下磁悬浮电机(8)构成;
在四旋翼飞行器的机身(10)四周均匀分布安装有A旋翼支架(12)的一端、B旋翼支架(14)的一端、C旋翼支架(16)的一端、D旋翼支架(18)的一端。A旋翼支架(12)的另一端用于连接第一组驱动负载中间放置的上下对称磁悬浮电机、B旋翼支架(14)的另一端用于连接第二组驱动负载中间放置的上下对称磁悬浮电机、C旋翼支架(16)的另一端用于连接第三组驱动负载中间放置的上下对称磁悬浮电机、D旋翼支架(18)的另一端用于连接第四组驱动负载中间放置的上下对称磁悬浮电机。
将本发明设计的驱动负载中间放置的上下对称磁悬浮电机应用于四旋翼飞行器上的优点在于:
①本发明利用磁悬浮轴承无摩擦的特点,能够实现旋翼的高速旋转,可实现同等升力下更小的旋翼尺寸,进而减小四旋翼飞行器总体的重量,提高飞行器的机动性。其几何尺寸远小于输出功率相同的常规旋转设备,有效地节约了材料,大幅度提高了设备的能量密度。磁悬浮技术使得直接驱动负载变成可能,无需增速机构,减小了系统体积,可实现零传动损耗运行,效率高,大大降低了运行噪声。
②本发明利用磁悬浮轴承的主动振动抑制功能,可将旋翼的振动与飞行器本体进行隔离,达到飞行器本体的极微振动。
③本发明采用上下对称驱动方式,避免了旋翼在高速旋转下,由悬臂负载弯矩带来的高速旋转扰动。
④本发明利用磁悬浮轴承无需润滑的特点,可实现旋翼的长寿命和高可靠,从而提升飞行器整机的寿命。
附图说明
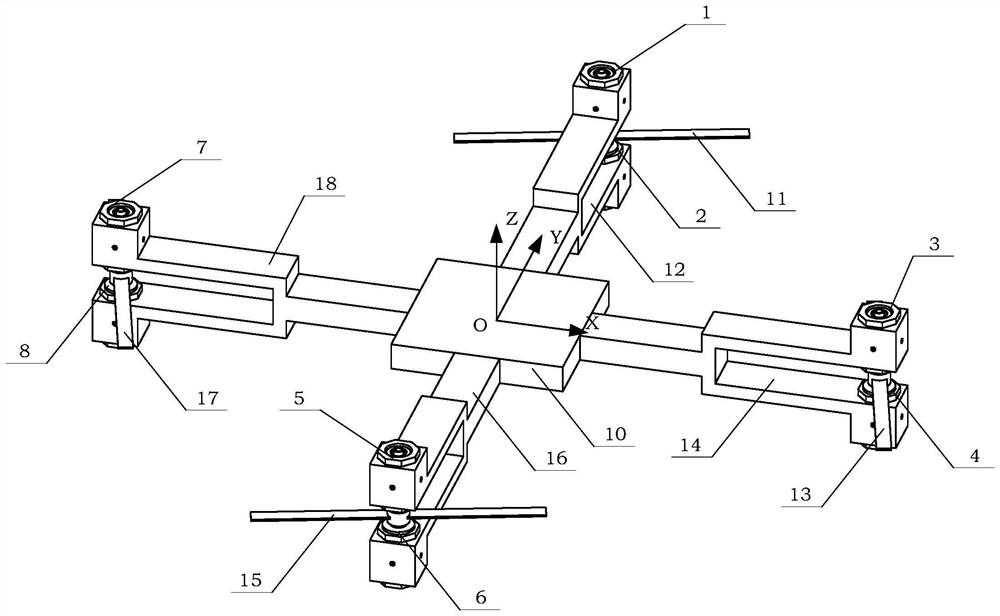
图1是本发明由负载中间放置的上下对称磁悬浮电机驱动的四旋翼飞行器的结构图。
图2是本发明四旋翼飞行器中第一组驱动部分的结构图。
图2A是本发明四旋翼飞行器中第一组驱动部分的分解图。
图3是本发明第一组驱动负载中间放置的上下对称磁悬浮电机的结构图。
图3A是本发明第一组驱动负载中间放置的上下对称磁悬浮电机的剖面图。
图4是本发明中的A上磁悬浮电机1的分解图。
图4A是本发明中的A上磁悬浮电机1的A轴向导磁环结构图。
图4B是本发明中的A上磁悬浮电机1的A轴向导磁环另一视角结构图。
图5是本发明中的A下磁悬浮电机2的分解图。
图5A是本发明中的A下磁悬浮电机2的B轴向导磁环结构图。
图5B是本发明中的A下磁悬浮电机2的B轴向导磁环另一视角结构图。
图6是本发明四旋翼飞行器中第二组驱动部分的结构图。
图6A是本发明四旋翼飞行器中第二组驱动部分的分解图。
图7是本发明四旋翼飞行器中第三组驱动部分的结构图。
图7A是本发明四旋翼飞行器中第三组驱动部分的分解图。
图8是本发明四旋翼飞行器中第四组驱动部分的结构图。
图8A是本发明四旋翼飞行器中第四组驱动部分的分解图。
具体实施方式
下面将结合附图对本发明做进一步的详细说明。
参见图1所示的四旋翼飞行器,该四旋翼飞行器由磁悬浮电机提供飞行动力。所述磁悬浮电机的结构为驱动负载中间放置的上下对称磁悬浮电机(如图2所示)。驱动负载中间放置的上下对称磁悬浮电机通过旋翼支架安装在四旋翼飞行器的机身10上,驱动负载中间放置的上下对称磁悬浮电机的两个转轴之间安装有旋翼。四旋翼飞行器上安装有结构相同的四个旋翼(11、13、15、17)和四个旋翼支架(12、14、16、18)。
在本发明中,A旋翼11、A旋翼支架12、A上磁悬浮电机1和A下磁悬浮电机2组成四旋翼飞行器的第一组驱动部分。
在本发明中,B旋翼13、B旋翼支架14、B上磁悬浮电机3和B下磁悬浮电机4组成四旋翼飞行器的第二组驱动部分。
在本发明中,C旋翼15、C旋翼支架16、C上磁悬浮电机5和C下磁悬浮电机6组成四旋翼飞行器的第三组驱动部分。
在本发明中,D旋翼17、D旋翼支架18、D上磁悬浮电机7和D下磁悬浮电机8组成四旋翼飞行器的第四组驱动部分。
参见图1、图2、图2A所示,在本发明中,A旋翼11的中部设有A旋翼连接柱11A,A旋翼连接柱11A的中心是K通孔11B。K通孔11B中安装有A上磁悬浮电机1的A转轴1B的连接段1B1与A下磁悬浮电机2的B转轴2B的连接段2B1。A上磁悬浮电机1的A转轴1B的连接段1B1与A下磁悬浮电机2的B转轴2B的连接段2B1相对放置。
参见图1、图2、图2A所示,在本发明中,A旋翼支架12的一端连接在四旋翼飞行器的机身10上,A旋翼支架12的另一端上设有LA支臂12A和LB支臂12B;LA支臂12A上设有用于安装A上磁悬浮电机1的A机壳1A的LA通孔12C;LB支臂12B上设有用于安装A下磁悬浮电机2的B机壳2A的LB通孔12D。LA支臂12A与LB支臂12B之间的U形槽12E用于A旋翼11运动。
参见图1、图6、图6A所示,在本发明中,B旋翼13的中部设有B旋翼连接柱13A,B旋翼连接柱13A的中心是M通孔13B。M通孔13B中安装有B上磁悬浮电机3的C转轴3B的连接段3B1与B下磁悬浮电机4的D转轴4B的连接段4B1。B上磁悬浮电机3的C转轴3B的连接段3B1与B下磁悬浮电机4的D转轴4B的连接段4B1相对放置。
参见图1、图6、图6A所示,在本发明中,B旋翼支架14的一端连接在四旋翼飞行器的机身10上,B旋翼支架14的另一端上设有NA支臂14A和NB支臂14B;NA支臂14A上设有用于安装B上磁悬浮电机3的C机壳3A的NA通孔14C;NB支臂14B上设有用于安装B下磁悬浮电机4的D机壳4A的NB通孔14D。NA支臂14A与NB支臂14B之间的U形槽14E用于B旋翼13运动。
参见图1、图7、图7A所示,在本发明中,C旋翼15的中部设有C旋翼连接柱15A,C旋翼连接柱15A的中心是P通孔15B。P通孔15B中安装有C上磁悬浮电机5的E转轴5B的连接段5B1与C下磁悬浮电机6的F转轴6B的连接段6B1。C上磁悬浮电机5的E转轴5B的连接段5B1与C下磁悬浮电机6的F转轴6B的连接段6B1相对放置。
参见图1、图7、图7A所示,在本发明中,C旋翼支架16的一端连接在四旋翼飞行器的机身10上,C旋翼支架16的另一端上设有QA支臂16A和QB支臂16B;QA支臂16A上设有用于安装C上磁悬浮电机5的E机壳5A的QA通孔16C;QB支臂16B上设有用于安装C下磁悬浮电机6的F机壳6A的QB通孔16D。QA支臂16A与QB支臂16B之间的U形槽16E用于C旋翼15运动。
参见图1、图8、图8A所示,在本发明中,D旋翼17的中部设有D旋翼连接柱17A,D旋翼连接柱17A的中心是R通孔17B。R通孔17B中安装有D上磁悬浮电机7的G转轴7B的连接段7B1与D下磁悬浮电机8的H转轴8B的连接段8B1。D上磁悬浮电机7的G转轴7B的连接段7B1与D下磁悬浮电机8的F转轴8B的连接段8B1相对放置。
参见图1、图8、图8A所示,在本发明中,D旋翼支架18的一端连接在四旋翼飞行器的机身10上,D旋翼支架18的另一端上设有SA支臂18A和SB支臂18B;SA支臂18A上设有用于安装D上磁悬浮电机7的G机壳7A的SA通孔18C;SB支臂18B上设有用于安装D下磁悬浮电机8的H机壳8A的SB通孔18D。SA支臂18A与SB支臂18B之间的U形槽18E用于D旋翼17运动。
参见图1所示,在本发明中,在四旋翼飞行器的机身10四周均匀分布安装有A旋翼支架12的一端、B旋翼支架14的一端、C旋翼支架16的一端、D旋翼支架18的一端。A旋翼支架12的另一端用于连接第一组驱动负载中间放置的上下对称磁悬浮电机、B旋翼支架14的另一端用于连接第二组驱动负载中间放置的上下对称磁悬浮电机、C旋翼支架16的另一端用于连接第三组驱动负载中间放置的上下对称磁悬浮电机、D旋翼支架18的另一端用于连接第四组驱动负载中间放置的上下对称磁悬浮电机。
参见图2、图2A、图6、图6A、图7、图7A、图8、图8A所示,本发明设计的是一种应用于四旋翼飞行器的驱动负载中间放置的上下对称磁悬浮电机,是由结构相同的上磁悬浮电机和下磁悬浮电机相对放置形成。即:
连接在A旋翼支架12上的A上磁悬浮电机1与A下磁悬浮电机2形成第一组驱动负载中间放置的上下对称磁悬浮电机;
连接在B旋翼支架14上的B上磁悬浮电机3与B下磁悬浮电机4形成第二组驱动负载中间放置的上下对称磁悬浮电机;
连接在C旋翼支架16上的C上磁悬浮电机5和C下磁悬浮电机6形成第三组驱动负载中间放置的上下对称磁悬浮电机;
连接在D旋翼支架18上的D上磁悬浮电机7和D下磁悬浮电机8形成第四组驱动负载中间放置的上下对称磁悬浮电机。
本发明设计的A上磁悬浮电机1、A下磁悬浮电机2、B上磁悬浮电机3、B下磁悬浮电机4、C上磁悬浮电机5、C下磁悬浮电机6、D上磁悬浮电机7和D下磁悬浮电机8的结构都是相同的。
如图3、图3A所示的结构相同的A上磁悬浮电机1和A下磁悬浮电机2的相对放置。
参见图3、图3A、图4、图4A、图4B所示,A上磁悬浮电机1包括有A机壳1A、A转轴1B、A转子永磁体1P、A径向磁轴承转子1Q、A电机定子1C、A线圈1J、A径向磁轴承定子1D、A径向磁轴承线圈1M、A轴向导磁环1G、A导磁环线圈1K、A推力盘1H、A探头群1N、A探头支架1L、A护套1S、A挡环1T。
参见图4A、图4B所示,A探头群1N包括有2个轴向探头(AA轴向探头1N1、AB轴向探头1N2)和4个径向探头(AA径向探头1N3、AB径向探头1N4、AC径向探头1N5、AD径向探头1N6)。A探头群1N中的探头分别安装在A探头支架1L上。A探头支架1L的轴向对称设有2个通孔,一个通孔内安装有AA轴向探头1N1,另一个通孔内安装有AB轴向探头1N2。在A探头支架1L的径向均匀设有4个通孔,第一个通孔用于安装AA径向探头1N3,第二个通孔用于安装AB径向探头1N4,第三个通孔用于安装AC径向探头1N5,第四个通孔用于安装AD径向探头1N6。A探头群1N用于探测A转轴1B运动后的位置。
参见图4A、图4B所示,A轴向导磁环1G的轴向设有一凹槽,凹槽内安装有A导磁环线圈1K。
参见图3A、图4所示,A电机定子1C的内部圆周上均匀分布有AA线圈骨架1C1,相邻AA线圈骨架1C1之间是AA线圈沟槽1C2,AA线圈沟槽1C2内放置有A线圈1J。
参见图3A、图4所示,A径向磁轴承定子1D的内部圆周上均匀分布有AB线圈骨架1D1,相邻AB线圈骨架1D1之间是AB线圈沟槽1D2,AB线圈沟槽1D2内放置有A径向磁轴承线圈1M。
参见图3A、图4所示,A转轴1B从一端至另一端顺次是连接段1B1、轴肩1B4、短轴段1B2和长轴段1B3。A转轴1B的连接段1B1安装在A旋翼11的A旋翼连接柱11A的K通孔11B中,且A转轴1B的连接段1B1与B转轴2B的连接段2B1相对放置,共同置于所述K通孔11B中。A转轴1B的短轴段1B2上套接有A推力盘1H、A探头支架1L(A探头支架1L的外圆面上套接有A轴向导磁环1G)。
A转轴1B的长轴段1B3上从一端至另一端顺次套接有A径向磁轴承转子1Q、AC隔套1R、A转子永磁体1P(A转子永磁体1P的外圆面上套接有A护套1S)、A挡环1T。
A轴向导磁环1G与径向磁轴承定子1D之间是AB隔套1F,径向磁轴承定子1D与A电机定子1C之间是AA隔套1E。
A转子永磁体1P与A电机定子1C之间是A护套1S。
A探头支架1L与A机壳1A之间是A轴向导磁环1G。
参见图3A、图4所示,A轴向导磁环1G、AB隔套1F、径向磁轴承定子1D、AA隔套1E和A电机定子1C的外部是A机壳1A。
参见图3、图3A、图5、图5A、图5B所示,A下磁悬浮电机2包括有B机壳2A、B转轴2B、B转子永磁体2P、B径向磁轴承转子2Q、B电机定子2C、B线圈2J、B径向磁轴承定子2D、B径向磁轴承线圈2M、B轴向导磁环2G、B导磁环线圈2K、B推力盘2H、B探头群2N、B探头支架2L、B护套2S、B挡环2T。
参见图5A、图5B所示,B探头群2N包括有2个轴向探头(BA轴向探头2N1、BB轴向探头2N2)和4个径向探头(BA径向探头2N3、BB径向探头2N4、BC径向探头2N5、BD径向探头2N6)。B探头群2N中的探头分别安装在B探头支架2L上。B探头支架2L的轴向对称设有2个通孔,一个通孔内安装有BA轴向探头2N1,另一个通孔内安装有BB轴向探头2N2。在B探头支架2L的径向均匀设有4个通孔,第一个通孔用于安装BA径向探头2N3,第二个通孔用于安装BB径向探头2N4,第三个通孔用于安装BC径向探头2N5,第四个通孔用于安装BD径向探头2N6。B探头群2N用于探测B转轴2B运动后的位置。
参见图5A、图5B所示,B轴向导磁环2G的轴向设有一凹槽,凹槽内安装有B导磁环线圈2K。
参见图3A、图5所示,B电机定子2C的内部圆周上均匀分布有BA线圈骨架2C1,相邻BA线圈骨架2C1之间是BA线圈沟槽2C2,BA线圈沟槽2C2内放置有B线圈2J。
参见图3A、图5所示,B径向磁轴承定子2D的内部圆周上均匀分布有BB线圈骨架2D1,相邻BB线圈骨架2D1之间是BB线圈沟槽2D2,BB线圈沟槽2D2内放置有B径向磁轴承线圈2M。
参见图3A、图5所示,B转轴2B从一端至另一端顺次是连接段2B1、轴肩2B4、短轴段2B2和长轴段2B3。B转轴2B的连接段2B1安装在A旋翼11的A旋翼连接柱11A的K通孔11B中,且A转轴1B的连接段1B1与B转轴2B的连接段2B1相对放置,共同置于所述K通孔11B中。B转轴2B的短轴段2B2上套接有B推力盘2H、B探头支架2L(B探头支架2L的外圆面上套接有B轴向导磁环2G)。
B转轴2B的长轴段2B3上从一端至另一端顺次套接有B径向磁轴承转子2Q、BC隔套2R、B转子永磁体2P(B转子永磁体2P的外圆面上套接有B护套2S)、B挡环2T。
B轴向导磁环2G与B径向磁轴承定子2D之间是BB隔套2F,径向磁轴承定子2D与B电机定子2C之间是BA隔套2E。
B转子永磁体2P与B电机定子2C之间是B护套2S。
B探头支架2L与B机壳2A之间是B轴向导磁环2G。
参见图3A、图4所示,B轴向导磁环2G、BB隔套2F、B径向磁轴承定子2D、BA隔套2E和B电机定子2C的外部是B机壳2A。
参见图1所示,在本发明中,将四旋翼飞行器的机身10的坐标系记为O-XYZ,B旋翼支架14和D旋翼支架18沿坐标系O-XYZ的X布置,A旋翼支架12和C旋翼支架16沿坐标系O-XYZ的Y布置,每一组驱动负载中间放置的上下对称磁悬浮电机的转轴轴线都是平行于坐标系O-XYZ的Z轴的,故将相对放置的两个电机的坐标系等效至坐标系O-XYZ中进行说明运动关系。A上磁悬浮电机1、B上磁悬浮电机3、C上磁悬浮电机5和D上磁悬浮电机7在工作时都是同时运动或者同时停止。A下磁悬浮电机2、B下磁悬浮电机4、C下磁悬浮电机6和D下磁悬浮电机8在工作时都是同时运动或者同时停止。为了方便叙述仅以A上磁悬浮电机1与A下磁悬浮电机2进行说明。
(A),A轴向导磁环1G和B轴向导磁环2G共同支承起机壳(A机壳1A、B机壳2A),实现在坐标系O-XYZ的沿Z轴的轴向悬浮运动。
(B),A径向磁轴承定子1D和B径向磁轴承定子2D的同向磁极,能够实现在坐标系O-XYZ的沿X轴方向的径向悬浮运动。
(C),A径向磁轴承定子1D和B径向磁轴承定子2D的同向磁极,能够实现在坐标系O-XYZ的沿Y轴方向的径向悬浮运动。
(D),A径向磁轴承定子1D和B径向磁轴承定子2D的异向磁极,能够实现在坐标系O-XYZ的绕Z轴的俯仰悬浮运动。
(E),A径向磁轴承定子1D和B径向磁轴承定子2D的异向磁极,能够实现在坐标系O-XYZ的绕Z轴的偏摆悬浮运动。
本发明设计的一种驱动负载中间放置的上下对称磁悬浮电机,其包括有结构相同的上磁悬浮电机和下磁悬浮电机。上磁悬浮电机与下磁悬浮电机相对放置,且两个电机的输出轴上安装有旋翼。驱动负载中间放置的上下对称磁悬浮电机通过旋翼支架均匀分布在四旋翼飞行器的圆周上。上磁悬浮电机安装在旋翼支架的LA支臂的通孔中,下磁悬浮电机安装在旋翼支架的LB支臂的通孔中。该磁悬浮电机采用冗余驱动和磁轴承对称分布的设计方式,实现旋翼在高速旋转条件下的基轴稳定。本发明设计的是一种应用于四旋翼飞行器的驱动负载中间放置的上下对称磁悬浮电机,能够解决传统四旋翼飞行器中应用传统电机驱动带来的转速受限于机械轴承问题和悬臂式旋翼带来的扭矩扰动问题。
- 驱动负载中间放置的上下对称磁悬浮电机及在四旋翼飞行器上的应用
- 驱动负载中间放置的上下对称磁悬浮电机及在四旋翼飞行器上的应用