一种大型炒菜机器人全自动输料与锁框系统
文献发布时间:2023-06-19 10:35:20
技术领域
本发明属于炒菜机器人领域,特别涉及一种大型炒菜机器人全自动输料与锁框系统的解决方法。
背景技术
当前小型炒菜机器人倒料入锅已有现成技术,但大型炒菜机器人仍没有自动输料及倒料退框系统,其原因是该类炒菜机器人因锅体高,菜料量重,依靠人工“举重”倒入需要花费大量人力成本,以及佐料与炒菜时间无法实现标准化。因此,现有大型炒菜机器人仅仅替代了厨师的“一把锅铲”,其余的工作全部依靠厨师的眼光与手法,是一种低档的半自动化的人机共用的器械,亟待觅求完全智能自动化大型炒菜机器人来更新换代。
发明内容
本发明实施例的目的在于提供一种大型炒菜机器人全自动输料与锁框系统,旨在解决目前大型炒菜机器人输送菜料时需投入大量人力成本的问题。
本发明实施例是这样实现的,一种大型炒菜机器人全自动输料与锁框系统,包括菜料框、导轨滑坡架、链条升降器、双向负荷链钩、承接结构、炒菜锅、出菜仓、佐料仓、电路自控系统和壳体,其中,所述承接结构包括料框伺服转轴、料框承接导架、倒料扣环、退框滑环、承接旋转架导轨、承接旋转架伺服马达和乘框旋转架底托板。
进一步地,所述大型炒菜机器人全自动输料与锁框系统还包括链条,所述链条上等距安装有所述双向负荷链钩,所述壳体边缘设置有所述料框伺服转轴,所述料框伺服转轴上安装有所述料框承接导架,所述料框承接导架可以围绕所述料框伺服转轴转动。
进一步地,所述导轨滑坡架上表面安装有斜坡导向轨,最底端设置有四轮定位槽,末端安装有阻尼防震器。
进一步地,所述导轨滑坡架呈斜坡状,所述菜料框在所述导轨滑坡架顺序排列。
进一步地,所述双向负荷链钩为双面反弧形结构。
进一步地,所述菜料框边缘安装有料框减阻滑轮。
进一步地,所述倒料扣环为直径比料框挂臂直径稍大的圆环。
进一步地,所述料框伺服转轴转动角度由所述电路自控系统控制。
进一步地,所述炒菜锅底端为半球形结构。
本发明的有益效果:大型炒菜机器人提供了自动输料、倒料、退框的系统方法,除了不需要人工的“举重”体力劳力外,更重要的是系统料框依次“排队”自动滑坡进入流程,提升倒料、退框及连续炒多种菜等步骤均无需人工管理,彻底实现智能化全自动,节约了人力成本。
附图说明
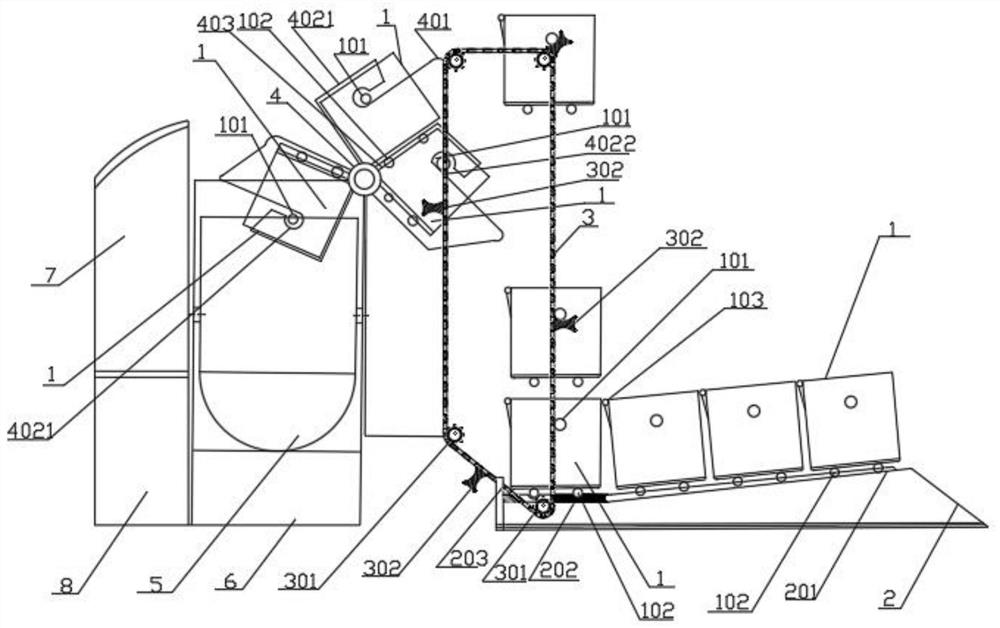
图1是本发明实施例提供的一种大型炒菜机器人全自动输料与锁框系统的主视图;
图2是本发明实施例提供的一种大型炒菜机器人全自动输料与锁框系统的俯视图;
图3是本发明实施例提供的一种大型炒菜机器人全自动输料与锁框系统的左视图。
具体实施方式
为了使本发明要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
如图1-3所示,本发明提供了一种大型炒菜机器人全自动输料与锁框系统,包括菜料框1、料框挂臂101、料框万向轮102、料框减阻滑轮103、导轨滑坡架2、斜坡导向轨201、四轮定位槽202、阻尼防震器203、链条升降器3、链条301、双向负荷链钩302、链轮伺服马达303、链轮304、承接结构4、炒菜锅5、出菜仓6、佐料仓7、电路自控系统8和壳体9。其中、承接结构4包括料框伺服转轴401、料框承接导架402、倒料扣环403、退框滑环404、承接旋转架导轨405、承接旋转架伺服马达406和乘框旋转架底托板407。本申请中的“大型炒菜机器人”是指锅内炒动的菜品质量大于20千克的炒菜机器人。其中,大型炒菜机器人全自动输料与锁框系统左侧主体为炒菜锅5、出菜仓6、佐料仓7、电路及自控系统8和壳体9。右侧主体为菜料框1和导轨滑坡架2,左右两侧通过中间的链条升降器3来连接。
菜料框1数量为多个。具体地,每个菜料框1两侧对称设置有料框挂臂101,料框挂壁101呈圆台状或者柱状或者杆状。菜料框1底部安装有料框万向轮102,用于在斜坡导向轨201上滑动和进入四轮定位槽202完成卡合,万向轮102的数量为2个或更多。导轨滑坡架2呈滑坡状,表面设置有斜坡导向轨201,滑坡末端设置有四轮定位槽202和阻尼防震器203。多个菜料框1依次排列,都放置在导轨滑坡架2上。导轨滑坡架2上表面具有10-20度的斜坡,便于菜料框1利用重力向前滑动。导轨滑坡架2一侧前端安装有链轮伺服马达303,用于驱动链轮304转动,链轮304数量为4个,具体地,位于导轨滑坡架2底端的链轮304连接有链轮伺服马达303,用作主动链轮,其余三个为从动链轮。链轮304左右两端各安装有一根链条,链轮伺服马达303通过带动链轮304转动,进而带动链条301转动。链条301上等距安装有双向负荷链钩302,两根链条301之间间隔距离为菜料框1两侧的料框挂臂101的距离。双向负荷链钩302数量为四个,结构为双面反弧形,用于与菜料框1两侧的料框挂臂101配合。炒菜锅5位于壳体9内部,锅身呈圆柱状,底面为半球面状,可以开合。佐料仓7位于炒菜锅5左侧,与炒菜锅5通过管道连接,用于在炒菜时添加佐料。电路及自控系统8位于佐料仓7下方,用于控制链轮伺服马达303和承接旋转架伺服马达406。出菜仓6位于炒菜锅5下方,可放置接菜盘。壳体9边缘安装有料框伺服转轴401,通过安装在其侧面的承接旋转架伺服马达406驱动。料框承接导架402与料框伺服转轴401连接,并围绕料框伺服转轴401转动,料框承接导架402由金属材料或其他强度高,脆性好的材料构成,用于承接菜料框1。料框承接导架402内设置有倒料扣环403、退框滑环404。其中,倒料扣环403呈圆形,直径略大于料框挂臂101,料框挂臂101可在倒料扣环403内滑动。退框滑环404用于引导菜料框1离开料框承接导架402。料框承接导架402之间设置有乘框旋转架底托板407,呈长板状,用于托住菜料框1。乘框旋转架底托板407上设置有承接旋转架导轨405,与料框万向轮102配合,用于引导菜料框1移动。
具体地,本发明运行时,先将待炒的菜放入菜料框1中,菜料框1在导轨滑坡架2依次排列,通过料框万向轮102在斜坡导向轨201上滑动。最前面的菜料框1的料框万向轮102进入四轮定位槽202卡合,菜料框1被导轨滑坡架2末端的阻尼防震器203顶住,进入链条升降器3。当链轮伺服马达303接到电路自控系统8的指令后,链轮304带动链条301转动,进而带动双向负荷链钩302做逆时针转动,双向负荷链钩302旋转到最前面的菜料框101上的料框挂臂101位置时,将其抬起,在抬起的初始过程中,因后继排队菜料框1靠紧挤压,会产生摩擦力,依靠其框与框之间安装的料框减阻滑轮103消除。随后,菜料框1沿着链条301做逆时针转动。当指令要求菜料框1离开链条升降器3而进入乘框伺服转轴4时,料框挂臂101被料框承接架402接住并滑入倒料扣环403中,菜料框1的料框万向轮102进入承框旋转架导轨403。此时,承框旋转架伺服马达406接受电路自控系统8的时间及方位角的程控指令,将菜料框1旋转至倒料位置,将菜料倒入炒菜锅5中,菜料框1的两个料框挂臂101因被倒料扣环403紧紧扣住而不致于翻入锅内。倒料完毕且抖动三下后,承框伺服转轴401带着菜料框1翻转220°,当翻转至180°左右时,菜料框1的料框挂臂101将沿着退框滑环404滑出且被链条301挡住,顺着链条301滑入双向负荷链钩302的挂钩之内,随着链轮升降器3逐渐下降脱钩落地。翻炒过程中,佐料仓7接受电路自控系统8信号,向炒菜锅5内倒入佐料,完成的菜品落入出菜仓6内。整个流程自动,无需人工管理。
本发明的有益效果:大型炒菜机器人提供了自动输料、倒料、退框的系统方法,除了不需要人工的“举重”体力劳力外,更重要的是系统料框依次“排队”自动滑坡进入流程,提升倒料、退框及连续炒多种菜等步骤均无需人工管理,彻底实现智能化全自动,节约了人力成本。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种大型炒菜机器人全自动输料与锁框系统
- 一种大型炒菜机器人全自动输料与锁框系统