智能分类垃圾桶
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及居家产品技术领域,特别是一种智能分类垃圾桶。
背景技术
21世纪,科技发展迅速,城市化加快,居民的生活水平提高,导致产生的生活垃圾日益增多。据统计,全国在2014年至2018年的这四年间,垃圾清运量急速增长,由17860万吨/年增长到22802万吨/年,而这仅仅是收集和运送到各生活垃圾处理场(厂)的城市生活垃圾清运量。“焚烧”是处理垃圾的常规手段,但这种处理方式不仅造成资源浪费,更污染环境,因为垃圾进行再分类后再合理处理事非常有必要的。但是,据调查发现,垃圾场(厂)并没有对垃圾进行分类,只是简单的利用磁铁和鼓风机对垃圾进行回收,其余进行填埋。像塑料袋等垃圾不能被土壤的微生物降解导致了对土壤和水资源的污染,还有许多有回收价值的资源被掩埋,造成了资源浪费。
随着垃圾强制分类时代的到来,为了节约居民垃圾分类的劳动时间和帮助居民识别垃圾种类出现了各种智能垃圾桶。但大多结构复杂、功能单一、价格昂贵。
发明内容
针对上述技术问题,本发明的目的在于提供一种解决上述技术问题的智能分类垃圾桶。
为解决上述技术问题,本发明智能分类垃圾桶,包括垃圾桶本体以及设置在所述垃圾桶本体内的智能监测系统;其中
所述垃圾桶本体包括:
外桶,所述外桶为一端开口的容器;
旋转机构,所述旋转机构设置在所述外桶内;
内桶,若干个所述内桶设置在所述旋转机构内;
固定机构,所述固定机构与所述旋转机构连接,所述固定机构位于所述内桶的开口处,在所述固定机构包括固定组件,所述固定组件与所述内桶相对应;以及
桶盖机构,所述桶盖机构与所述旋转机构连接,所述桶盖机构盖设在所述固定机构上。
优选地,所述旋转机构包括:
转盘,所述转盘设置在所述外桶内,若干个所述内桶设置在所述转盘上;在所述转盘上设有转盘凹槽,所述内桶嵌设在所述转盘凹槽内;
中心轴,所述中心轴穿设于所述转盘,所述固定机构及所述桶盖机构分别与所述中心轴旋转连接。
优选地,所述旋转机构还包括转架,所述转架通过所述中心轴与所述转盘连接,在所述转架上设有转架凹槽,所述转架凹槽套设在所述内桶外侧。
优选地,所述固定机构包括:
固定盘,所述固定盘与所述中心轴连接,所述固定组件设置在所述固定盘上;其中
所述固定组件包括:
固定架,所述固定架设置在所述固定盘上,所述固定架与所述内桶相对应;
固定件,所述固定件设置在所述固定架上。
优选地,所述桶盖机构包括:
桶盖,所述桶盖与所述中心轴连接,在所述桶盖上设有投放口;
转盖,所述转盖与所述中心轴连接,所述转盖与所述投放口对应。
优选地,在所述内桶的侧壁上设有把手。
优选地,所述智能监测系统包括:
监控平台,所述监控平台设置在所述外桶内;
传感组件,所述传感组件设置在所述垃圾桶本体上,所述传感组件与所述监控平台连接;
转盘电机,所述转盘电机设置在所述旋转机构上、分别与所述中心轴及所述监控平台连接;
桶盖电机,所述桶盖电机设置在所述桶盖机构上、分别与所述中心轴及所述监控平台连接。
优选地,所述监控平台包括相互连接的主控电路、语音识别电路;其中
所述语音识别电路包括:
语音主控芯片,所述语音主控芯片的P3.0/RXD引脚及P3.1/TXD引脚分别与所述主控电路连接;
语音识别芯片,所述语音识别芯片的P0/SDI引脚与所述语音主控芯片的P0.0引脚连接,所述语音识别芯片的P1/SDO引脚与所述语音主控芯片的P0.1引脚连接,所述语音识别芯片的P2/SDCK引脚与所述语音主控芯片的P0.2引脚连接,所述语音识别芯片的P3引脚与所述语音主控芯片的P0.3引脚连接,所述语音识别芯片的P4引脚与所述语音主控芯片的P0.4引脚连接,所述语音识别芯片的P5引脚与所述语音主控芯片的P0.5引脚连接,所述语音识别芯片的P6引脚与所述语音主控芯片的P0.6引脚连接,所述语音识别芯片的P7引脚与所述语音主控芯片的P0.7引脚连接;
所述主控电路为ArduinoUNOR3;所述语音主控芯片为STC11L08XE;所述语音识别芯片为LD3320。
优选地,所述传感组件包括发射端及接收端;其中
所述接收端与所述主控电路连接。
优选地,所述智能监测系统还包括蜂鸣器,所述蜂鸣器与所述主控电路连接。
本发明智能分类垃圾桶设计分为内、外桶,外桶内设有转动内桶的驱动装置,外桶的打开关闭也采用转动的方式。当使用者要投放垃圾时,说出垃圾的种类例如“纸盒”,声控接收器接收到语音信号,然后转盘电机带动中心轴转动,转盘、内桶、转架和垃圾袋固定盘跟随中心轴转动,将“纸盒”相应的内桶旋转到垃圾桶盖扇形缺口的下方。随之转盖电机带动垃圾桶转盖转动打开垃圾桶,此时就可以投放垃圾。垃圾桶转盖停留一段时间后就会合上,而停留的这段时间里在垃圾桶固定盘和内桶之间的空隙中有红外光电传感器会检测是否达到垃圾堆满的高度,如果达到堆满高度,蜂鸣器就会响起提醒使用者盖更换垃圾袋并且处于常开状态。在垃圾桶固定盘上四个扇形口的边沿上都各有一垃圾袋固定结构,防止在投放垃圾时垃圾扯下垃圾袋。更换垃圾袋后,由于红外光电传感器是隔两分钟就会检测因此垃圾桶转盖就会转动合上,与此同时内桶也会转动到最初位置。
同时,使用语音来控制垃圾桶的开启与关闭,避免了制造成本昂贵,适合普通家庭的使用。垃圾桶内有四个内桶可分为可回收垃圾、有害垃圾、湿垃圾和干垃圾四类垃圾桶将各类垃圾分类,符合我国的垃圾分类标准。更换垃圾袋只需要在垃圾桶处于“开启”状态的时候从固定结构上将垃圾袋松开,然后提起来。新的垃圾袋套上然后两边用固定结构固定,与普通的垃圾桶套袋方式类似,只多了一个固定方式。当垃圾袋破损内桶有垃圾残留时,内桶可以从垃圾桶盖的扇形缺口直接提出,方便清理。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征目的和优点将会变得更明显。
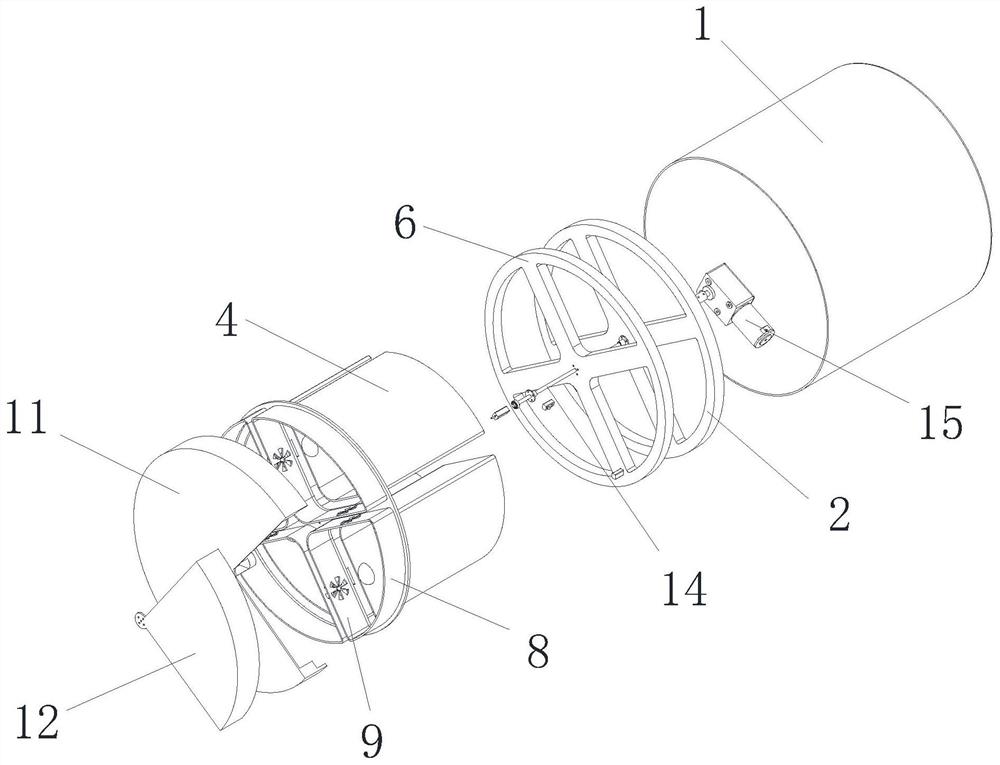
图1为本发明智能分类垃圾桶爆炸图;
图2为本发明智能分类垃圾桶转盘结构示意图;
图3为本发明智能分类垃圾桶转架结构示意图;
图4为本发明智能分类垃圾桶内桶结构示意图;
图5为本发明智能分类垃圾桶固定机构结构示意图;
图6为本发明智能分类垃圾桶桶盖机构结构示意图;
图7为本发明智能分类垃圾桶组装示意图;
图8为本发明智能分类垃圾桶主控电路图一;
图9为本发明智能分类垃圾桶主控电路图二;
图10为本发明智能分类垃圾桶语音识别电路图一;
图11为本发明智能分类垃圾桶语音识别电路图二;
图12为本发明智能分类垃圾桶语音识别电路图三;
图13为本发明智能分类垃圾桶传感组件电路图;
图14为本发明智能分类垃圾桶工作流程图。
本发明智能分类垃圾桶附图中附图标记说明:
1-外桶 2-转盘 3-转盘凹槽
4-内桶 5-把手 6-转架
7-转架凹槽 8-固定盘 9-固定架
10-固定件 11-桶盖 12-转盖
13-投放口 14-中心轴 15-转盘电机
16-桶盖电机 17-传感组件
具体实施方式
下面结合附图对本发明智能分类垃圾桶作进一步详细说明。
如图1~图14所示,本发明智能分类垃圾桶的转盘2、垃圾袋固定盘8和转架6都用法兰盘联轴器与中心轴14连接在一起,而中心轴14又以刚性联轴器与转盘电机15相连接,使得电机驱动中心轴14转动时,转盘2、垃圾袋固定盘8和转架6随之转动。此外中心轴14在转动时会可能会出现偏离中心旋转,中心轴14另一端则用轴承与垃圾桶盖11连接避免偏离中心转动,垃圾桶盖11则相对固定在垃圾外桶1,使得垃圾桶盖11不会跟随转动。
垃圾袋固定盘8里每一个扇形固定架9的两边都各有一个类似于雪花形状的固定件10,将垃圾袋如普通垃圾桶套袋方式套袋后,其边沿往雪花形状的固定件10里面塞入达到将垃圾袋拉扯住的目的,在日常生活中,普通垃圾桶中的垃圾袋经常会从桶的边沿脱落,雪花结构有效防止投放垃圾时垃圾将垃圾袋扯下,有固定垃圾袋的作用。
垃圾内桶4放置在转盘2的上面,而转盘2位于底部可以避免其中一个垃圾内桶4过重,导致较大角度倾斜干涉转盘2的旋转,但旋转时可能会垃圾内桶4发生相对位移,所以在转盘2上设置了扇形的转盘凹槽3可以刚好放置垃圾内桶4桶避免转动发生相对位移。
转架6上的转架凹槽7的作用在于避免转动过程中因为惯性垃圾内桶4发生碰撞,垃圾内桶4倾斜情况,也对垃圾桶的位置起固定作用。
为开盖时的状态。垃圾桶盖11有一扇形投放口13,当需投放垃圾时就会打开如图的状态,要投放的垃圾桶就位于扇形缺口的正下方。
垃圾转盖的闭合方式采用桶盖16带动旋转实现,这样即使垃圾桶上方有遮挡物时也能正常开盖。采用旋转式开盖的工作扭矩比翻转式开盖的工作扭矩小,可采用小功率电机。且转盖12略大于并且紧贴垃圾桶盖11,有效防止垃圾异味扩散到空气中,避免了对家庭环境的影响。
为了能够提醒使用者内桶4的垃圾装满,在位于投放口13的正下方,垃圾桶固定盘8与内桶4之间设置了一个光电传感器的体积检测平面,内桶4底部有重力传感器检测。当有光电传感组件17检测到后,就会传递出信号给控制中心,然后控制中心传递信号给蜂鸣器,蜂鸣器报警,避免垃圾只堆积满内桶4的一侧就提醒使用者更换垃圾袋的情况出现。
外桶1在为了没有棱角的结构设计成圆柱状,避免对使用者造成伤害。在此基础上,为尽量使内桶4能够有大容量来堆积更多垃圾,将内桶4设计成扇形结构。在内桶4的两边设置了两个向桶内侧凹的半圆槽把手5,当需要将内桶4取出清理时,可借助桶的外侧或内侧抓住两个半圆槽方便使用者取出。
转盘电机15的选型
(1)工作扭矩T
当四个垃圾桶都堆满垃圾时,整个旋转机构的总重量M为5Kg则工作扭矩T
T
其中r为转盘2的半径
(2)启动扭矩T计算:
启动扭矩T等于惯性扭矩Ta和工作扭矩T
F
其中ω为角速度(r/min)
T
即
T=T
(3)输出功率N的计算
GW600-5电机参数
取安全系数为1.5,T
桶盖电机16的选择:
(1)工作扭矩T
垃圾转盖采用塑料材质,约为0.05Kg。则工作扭矩T
T
其中r为转盘2的半径
(2)启动扭矩T计算:
启动扭矩T等于惯性扭矩Ta和工作扭矩T
F
其中ω为角速度(r/min)
T
即
T=T
(3)输出功率N的计算
取安全系数为1.5,T
GA12-N20电机参数
控制系统的硬件选择
该设计采用ArduinoUNOR3为智能分类的系统核心,由红外光电传感器、电源电路、驱动模块、语音模块构成了智能分类控制系统。其工作流程为先对使用者说的词语进行语言识别判断出垃圾种类,根据种类进行相应的内桶4旋转,再进行桶盖11的旋转打开,投入垃圾后会进行红外检测。如果堆满就会停留在此状态重复检测,没有堆满内桶4旋转相应角度,最后桶盖11旋转关闭。
主控电路
主控电路是采用ArduinoUNOR3,以Atmega328P为基础的智能语音分类垃圾系统来实现垃圾桶的语音识别控制垃圾桶的开启与关闭。输入电压:外部供电7V-12V直流输入,USB供电电压5V。
其中电机与蜂鸣器:两个电机与ArduinoUNOR3连接,GW600-涡轮电机接引脚8,同时外接电源;GA12-N20电机接引脚9,同时也外接电源;在程序中以低电平驱动,以防单片机驱动时,电机所需的电压不足。蜂鸣器则连接引脚11,另一引脚连接电源。
语音识别电路
LD3320语音识别模块由STC11L08XE的主控芯片与LD3320A的语音识别系统组成。需5V电源保证供电稳定,可识别所有普通话,在2米以内识别。最多可以识别50条语言,并可接任意单片机。其中STC11L08XE的RXD与主控电路的TXD即引脚0相连,TXD连接RXD即引脚1。
红外光电传感组件
红外F3对射式传感器可感应2-25cm的距离,检测距离可以调节,感应时间为2ms,工作电源为4.5V-5.5V,输出电流100mA,具有灵敏度高、使用寿命长的特点。左边为发射端:引脚1连接GND,引脚2连接VCC;右边为接收端:引脚1连接VCC,引脚2连接ArduinoUNOR3的引脚10。
本发明主要采用语音识别控制垃圾桶盖11以及内桶4的旋转,首先语音模块的程序设计,设置四个指令,分别为干垃圾、湿垃圾、可回收垃圾、有害垃圾。如下所示:
Voice.init();//初始化VoiceRecognition模块
Voice.addCommand("ganlaji",0);//添加指令,参数(指令内容,指令标签(可重复))
Voice.addCommand("shilaji",1);
Voice.addCommand("kehuishoulaji",2);
Voice.addCommand("youhailaji",3);
然后是识别后工作程序,下面程序为转盖正下方的内桶4假设为干垃圾内桶4。当识别出为干垃圾时,内桶4不动桶盖11旋转,投入垃圾后进行红外检测,若是检测到垃圾满了蜂鸣器响起,其他保持原状态。再过2分钟后会进行再次检测,如果没有更换垃圾袋将会一直循环,若是检测到未满,垃圾桶盖11就会旋转关闭。
digitalWrite(wolun,HIGH);
digitalWrite(dianji,LOW);//桶盖11电机旋转
delay(375);
digitalWrite(dianji,HIGH);
delay(15000);
if(guangdian==1)//判断垃圾是否装满
{
digitalWrite(fengmingqi,HIGH);//装满,蜂鸣器响起
delay(120000);//等待2分钟
else
{
digitalWrite(fengmingqi,LOW);//未装满,蜂鸣器不工作
}
digitalWrite(dianji,LOW);
delay(375);
digitalWrite(dianji,HIGH);
break;
以上已对本发明创造的较佳实施例进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明创造精神的前提下还可作出种种的等同的变型或替换,这些等同的变型或替换均包含在本申请权利要求所限定的范围内。
- 一种智能分类垃圾桶及智能分类方法
- 智能分类垃圾桶及垃圾智能分类系统