涡旋光轨道角动量数的测量装置及其测量方法
文献发布时间:2023-06-19 11:13:06
技术领域
本发明涉及一种涡旋光轨道角动量数的测量方法,具体为一种基于不透明干板的直直边缘菲涅尔区衍射图分析法来实现涡旋光轨道角动量数的测量装置与方法。
背景技术
具有相位奇异性且携带轨道角动量的涡旋光对于光学操纵,光学镊子,量子通信和粒子加速等领域有着重要的应用前景。涡旋光的轨道角动量数不仅决定着涡旋光与物质相互作用时的扭转力,同时作为一个新的光场维度,也在光通信中能极大地扩展信息的容量。因此轨道角动量数携带了光场的能量和信息,对其测量显得极其重要。
目前的现有研究中,对涡旋光轨道角动量数的测量主要分为干涉法和衍射法。对干涉法,有比较经典的基于马赫-曾德干涉仪的干涉图样测量【Optics Communications334,235(2015)】,然而干涉系统的搭建对光路要求极高,并且需要窄频相干激光光源,使得其实验难度和实验条件大大增加。对衍射法,现有研究一种是利用孔径衍射的方法去测量拓扑荷,比如圆孔,三角孔,五角星孔等;另外是通过观测衍射光学元件的衍射光场,如椎形镜、倾斜透镜、衍射光栅等。这两种方法都需要特殊或精准的光学参数才能完成测量。因此,快速、有效、兼容性高、实验难度低的轨道角动量数探测方式将会对科研工作者带来极大的便利。
发明内容
为解决现有技术的上述问题,本发明提供了一种涡旋光轨道角动量数的测量方法,利用常见的不透明干板便可以实现拓扑荷的测量,具有快速、有效、兼容性高、实验难度低的特性。
本发明的技术解决方案如下:
一种基于不透明干板直边缘衍射的涡旋光轨道角动量数的测量装置,包括涡旋光产生模块,用于产生待测涡旋光;衍射模块,用于将待测涡旋光转换为边缘衍射光,挡住待测涡旋光的一部分,未遮挡的部分经近场衍射后入射到成像装置;成像装置,用于接收垂直入射的边缘衍射光,成像后传输至计算机。
所述的涡旋光产生模块包括一连续激光器,连续激光器的输出光依次通过起偏器和扩束器后变为宽光束线偏光,透过偏振分束器后再经过1/4波片垂直入射到加载了螺旋相位的反射式空间光调制器上,经该反射式空间光调制器反射后,沿原路返回经所述的1/4波片,由偏振分束器反射后,依次经过缩束器和检偏器后生成涡旋光。
所述的衍射模块为黑色的不透明金属矩形干板,待测涡旋光被衍射模块所挡部分须在光场最大光强宽度的一半到两倍之间,并且衍射距离在0.05到0.2个瑞利距离之间,保证衍射光场的条纹清晰可辨。
所述的成像装置为CCD相机,用于接收垂直入射的边缘衍射光,成像后传输至计算机;所述的计算机与反射式空间光调制器相连,用于加载螺旋相位分布图;所述的起偏器和检偏器用于调节涡旋光束的光束质量;所述的扩束器和缩束器由两个焦点重合的凸透镜组成,用于调节光场的半径。
基于不透明干板直边缘衍射的涡旋光轨道角动量数的测量方法,具体的步骤为:
(1)将激光器、起偏器、扩束器、偏振分束器、1/4波片、反射式空间光调制器、缩束器、检偏器、不透明干板、CCD相机和计算机按照上述装置布置好光路;
(2)计算机将螺旋相位分布图加载到涡旋光产生模块中;
(3)打开激光器的电源,其发出的基模高斯光经过起偏器变为单一方向的线偏光,再经过扩束器后直接透过偏振分束器到1/4波片;所述的1/4波片能够使得入射光的偏振方向偏转45°;偏转后再入射到加载了螺旋相位的反射式空间光调制器上,反射后再次通过1/4波片,使得总偏振方向偏转90°(与经过起偏器后的光场偏振方向正交),从而再次经过偏振分束器后能够全部反射到缩束器上;所述的缩束器的作用是保证光场能够耦合到CCD相机的探测器中;缩束后的光场通过检偏器入射到不透明干板上;所述的检偏器作用是滤除其他偏振态,保证输出为单一方向偏振;经过不透明干板的直边缘衍射后再耦合进CCD相机中,将图像储存进计算机;
(4)将步骤(3)中获得的涡旋光不透明干板直边衍射图像沿水平中心线分为上衍射图像和下衍射图像,分别数上、下两幅衍射图像的条纹数,并将下衍射图像的条纹数减去上衍射图像的条纹数,即待测涡旋光的轨道角动量数。
本发明的工作原理,数值计算参照【Optics Communications341,284-294(2015)】:
设入射到干板上的拉盖尔高斯涡旋光(LG)的复振幅为,
其中
经不透明干板边缘衍射后,在距离干板z处的衍射光场由菲涅耳衍射积分确定,
本发明利用数值积分的方法得出(3)式的数值解,与实验进行比对,验证方法准确性和实用性。
本发明的方法能够实现涡旋光轨道角动量数的测量,与现有技术相比,本发明的特点在于检测元件的简便和易得,并且能够快速地检测所用涡旋光的轨道角动量数,从而可以广泛应用于量子通信、OAM信息编码与解码、光镊、光学扳手、粒子操纵等领域的轨道角动量数测量。
附图说明
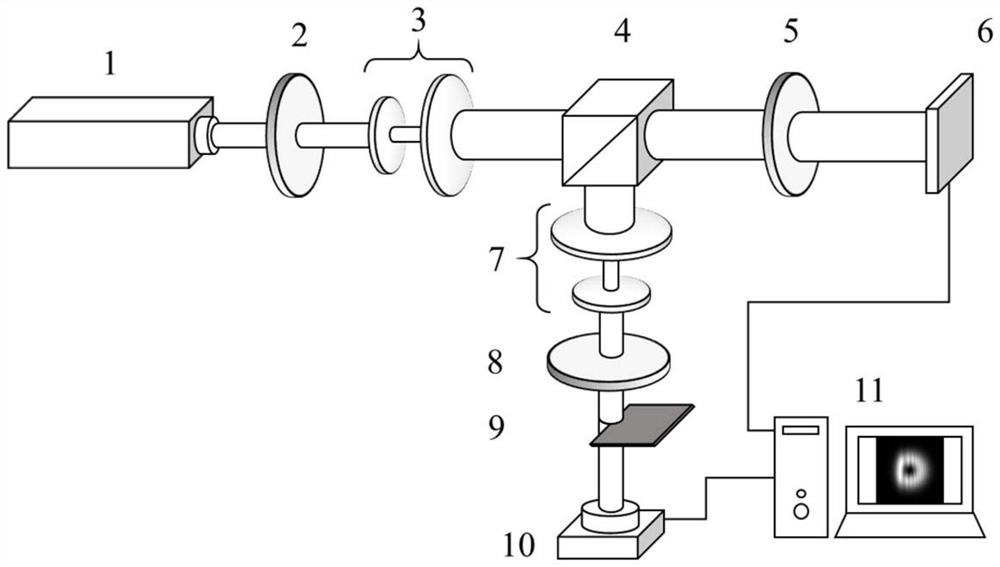
图1为发明中的测量装置结构示意图;图中标记:1-激光器,2-起偏器,3-扩束器,4-偏振分束器,5-1/4波片,6-反射式空间光调制器,7-缩束器,8-检偏器,9-不透明干板,10-CCD相机,11-计算机。
图2为不透明干板在光场中的位置示意图。
图3为加载到反射式空间光调制器上的相位分布图(上)以及相应的衍射光场图(下),图中子图从左至右的轨道角动量数分别为l=1,2,3,4。
图4为数值模拟得到的z=0.1z
具体实施方式
下面结合附图对本发明作进一步说明,但不应以此限制本发明的保护范围。
如图1所示,基于不透明干板直边缘衍射的涡旋光轨道角动量数的测量装置,包括涡旋光产生模块,用于产生待测涡旋光;衍射模块,用于将待测涡旋光转换为边缘衍射光,挡住待测涡旋光的一部分,未遮挡的部分经近场衍射后入射到成像装置;成像装置,用于接收垂直入射的边缘衍射光,成像后传输至计算机。
所述的涡旋光产生模块包括一连续激光器1,该实施例中连续波激光器1选择波长为1064nm,功率为2mW的Nd:YAG激光器;该连续波激光器1的输出光在传输方向上依次通过起偏器2和扩束器3后变为宽光束p偏振光,透过偏振分束器4后再经过1/4波片5后偏振态变为圆偏振光,再垂直入射到加载了拓扑荷数为l的螺旋相位的反射式空间光调制器6上,经该反射式空间光调制器反射后,沿原路返回经所述的1/4波片5后偏振态变为s偏振光,由偏振分束器4反射后,依次经过缩束器7和检偏器8后便生成了拓扑荷为l的涡旋光。
所述的衍射模块9为黑色的不透明金属矩形干板,光场被衍射模块所挡部分在光场最大光强宽度处(即γ=1),并且衍射距离在0.1个瑞利距离处(即z=0.1z
所述的成像装置10为CCD相机,用于接收垂直入射的边缘衍射光,成像后传输至计算机11。所述的计算机11与反射式空间光调制器6相连,用于加载螺旋相位分布图;所述的起偏器2和检偏器8用于调节涡旋光束的光束质量;所述的扩束器3和缩束器7由两个焦点重合的凸透镜组成,用于调节光场的半径。
基于不透明干板直边缘衍射的涡旋光轨道角动量数的测量装置进行涡旋光轨道角动量数的测量方法,包括如下步骤:
(1)将1064nm,功率为2mW的Nd:YAG激光器1、起偏器2、扩束器3、偏振分束器4、1/4波片5、反射式空间光调制器6、缩束器7、检偏器8、不透明干板9、CCD相机10和计算机11按照上述装置布置好光路;
(2)将附图3的螺旋相位分布图l=1,2,3,4的螺旋相位分别加载到反射式空间光调制器6中;
(3)打开Nd:YAG激光器1的电源,其发出的基模高斯光经过起偏器2变为单一方向的线偏光,再经过扩束器3后直接透过偏振分束器4到1/4波片5;所述的1/4波片5能够使得入射光的偏振方向偏转45°;偏转后再入射到加载了螺旋相位的反射式空间光调制器6上,反射后再次通过1/4波片5,使得总偏振方向偏转90°(与经过起偏器1后的光场偏振方向正交),从而再次经过偏振分束器4后能够全部反射到缩束器7上,经过检偏器7后便生成了涡旋光;所述的缩束器7的作用是保证光场能够耦合到CCD相机10的探测器中;所述的检偏器8作用是滤除其他偏振态,保证输出为单一方向偏振;
(4)由步骤(3)生成的涡旋光入射到不透明干板9上,经过干板9的边缘衍射后再耦合进CCD相机10中,将图像储存进计算机11;
(5)将步骤(4)中获得的涡旋光不透明干板直边衍射图像沿水平中心线分为上衍射图像和下衍射图像,分别数上、下两幅衍射图像的条纹数,并将下衍射图像的条纹数减去上衍射图像的条纹数,即待测涡旋光的轨道角动量数。
最终,通过搭建光路后便能够完成相应涡旋光的轨道角动量数的测量。
- 涡旋光轨道角动量数的测量装置及其测量方法
- 涡旋光轨道角动量数的测量装置及其测量方法