自动化喷涂的机器人装备
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及自动化喷涂技术领域,具体为自动化喷涂的机器人装备。
背景技术
喷涂通过喷枪或碟式雾化器,借助于压力或离心力,分散成均匀而微细的雾滴,施涂于被涂物表面的涂装方法。可分为空气喷涂、无空气喷涂、静电喷涂以及上述基本喷涂形式的各种派生的方式,如大流量低压力雾化喷涂、热喷涂、自动喷涂、多组喷涂等,喷涂作业生产效率高,适用于手工作业及工业自动化生产,应用范围广主要有五金、塑胶、家私、军工、船舶等领域,是现今应用最普遍的一种涂装方式。
经检索,中国专利号CN107876267A,公开了一种喷涂机器人,其结构包括喷涂手枪、机械控位轴、喷涂执行臂、驱动轴、机器人主体、数据运转生成轨道驱动机构、旋转座、平行滑座、固定底架、横杆,其特征在于:所述固定底架装设在平行滑座上并与平行滑座过渡配合,所述平行滑座上固定设有横杆,所述旋转座内嵌于固定底架并与固定底架垂直,所述旋转座上方与机器人主体相连接……其解决的主要问题是现有的机器人的喷涂工作时,轨道行程控制不精确,易避免发生碰撞,安全系数低,但是还具有一定的局限性,现有的自动化喷涂机器人在使用过程中具有如下不足:
1、现有的喷涂机器人在喷涂作业中,大多数通过机械臂进行控制喷涂,但是喷涂装置安装在机械臂上随着机械臂移动,使得喷涂装置与喷涂物之间的距离不一定,进一步使得喷涂装置与喷涂物的间距无法控制,使得涂料从喷涂装置内出来后据喷涂物还有一端距离,导致涂料在这段距离飞行的时间、距离不一,进一步导致喷涂不均匀;
2、现有的喷涂机器人在喷涂作业中,大多数通过车间进行密封保护,防止污染和泄漏,再通过风机吸附喷涂过程中分散到空气内的涂料,避免被人体吸入,但在喷涂过程中会有部分凝结状的涂料被喷洒到空气中无法被风机吸收,从而导致掉落在车间内发生污染,并且被人体吸入,从而造成对操作人员的身体伤害;
3、现有的喷涂机器人在喷涂过程中大多数采用机械臂进行移动,但有些喷涂物体型较大,并且表面不是光滑的平面,导致机械臂的喷涂范围无法达到,进一步使得喷涂物表面喷涂不完整。为此,我们提出自动化喷涂的机器人装备。
发明内容
本发明的目的在于提供自动化喷涂的机器人装备,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:自动化喷涂的机器人装备,包括底座,所述底座的表面固定连接有机械操作臂,所述机械操作臂的表面固定连接有喷涂设备,所述机械操作臂的表面固定连接有喷水器,所述底座的表面固定连接有水箱,所述底座的表面安装有固定装置,所述底座的表面安装有遮挡结构;
所述机械操作臂包括基座、第一电机、第二电机和液压缸,所述基座的表面固定连接有安装架,所述安装架的表面固定连接有第一电机,所述第一电机的内部安装有第一转动轴,所述第一转动轴的表面固定连接有第一摆臂,所述第一摆臂的表面固定连接有第二电机,所述第二电机的内部安装有第二转动轴,所述第二转动轴的一端贯穿第一摆臂转动连接有第二摆臂,所述第二摆臂的内部安装有液压缸,所述液压缸的内部安装有伸缩杆;
所述喷涂设备包括喷涂装置、射线灯和接收器,所述喷涂装置的表面固定连接有喷头,所述喷涂装置的表面固定连接有射线灯,所述喷涂装置的表面固定连接有接收器,所述喷涂装置的顶端表面固定连接有输料管,所述输料管的一端固定连接有涂料罐;
所述喷水器包括连接环和水泵,所述连接环的内壁固定连接有支架,所述连接环的表面固定连接有喷水头,所述连接环的内部插设有水管,所述水管的一端固定连接有水泵。
优选的,所述底座的表面设置有环形滑槽,所述底座表面设置的环形滑槽圆心位置设置有开孔。
优选的,所述基座固定连接在底座的表面,所述基座的圆心与底座表面设置的环形滑槽圆心处于同一水平直线上,所述安装架的顶端表面设置有开槽,所述安装架表面设置的开槽两侧设置有铰接孔,所述第一转动轴贯穿安装架顶端表面设置的铰接孔转动连接第一摆臂,所述第一摆臂通过第一转动轴铰接在安装架顶端表面设置的开槽内。
优选的,所述喷涂装置安装于伸缩杆的一端,所述喷头、射线灯和接收器均安装与喷涂装置朝向固定装置一侧的表面,所述接收器垂直安装于射线灯的上方。
优选的,所述连接环设置为环形结构,所述连接环的内部设置为镂空状,所述支架设置为四组成圆周发布在连接环的内壁上,四组所述支架的一端分别固定连接在第二摆臂的表面上,所述喷水头设置为若干组成等距离圆周分布在连接环朝向固定装置的一侧表面,所述喷水头设置为由内向外倾斜状,所述水泵安装于水箱内。
优选的,所述固定装置包括第三电机和旋转盘,所述第三电机的内部安装有第三转动轴,所述第三转动轴的一端固定连接有旋转盘,所述旋转盘的顶端表面固定连接有固定器,所述旋转盘的底端表面固定连接有连接杆,所述连接杆的一端固定连接有安装轴,所述安装轴的表面套有滑轮。
优选的,所述第三电机安装在底座的底端表面上,所述第三转动轴贯穿底座表面环形滑槽中心位置的孔洞转动连接旋转盘,所述旋转盘的尺寸大小大于底座表面设置的环形滑槽尺寸大小,所述固定器设置为五组呈等距离圆周分布在旋转盘的表面边缘位置,所述固定器的内部设置有两组孔洞,所述滑轮通过安装轴铰接在连接杆上,所述滑轮安装于底座表面设置的环形滑槽内。
优选的,所述遮挡结构包括挡板和脚垫,所述挡板的内部插设有铰接轴,所述铰接轴安装于铰接块内,所述挡板的表面固定连接有支撑脚,所述挡板的表面固定连接有固定块,所述固定块的内部插设有固定轴,所述固定轴的表面铰接有第一支撑腿,所述第一支撑腿的内部插设有第二支撑腿,所述第二支撑腿的一端固定连接有脚垫。
优选的,所述遮挡结构设置为三组分别安装在固定装置的周围,所述挡板的表面设置有开口,所述铰接块安装于挡板表面设置的开口位置,所述铰接块固定连接在底座的表面上,所述支撑脚的长度大小等于底座的高度大小,所述第一支撑腿和第二支撑腿之间通过活动卡扣进行限位连接。
与现有技术相比,本发明的有益效果是:
1、本发明通过机械操作臂操作喷涂设备的位置调节,使得喷涂设备的喷涂范围变大,同时喷涂设备由喷涂装置、喷头、射线灯、接收器、输料管和涂料罐组成,使得涂料罐可以对喷涂装置内进行供料,再通过喷涂装置上安装的喷头可以将涂料喷出,同时喷涂装置在喷刷涂料过程中,通过射线灯射出光线,光线会照射到喷涂物表面并被折射回来到接收器表面被接受,通过光线折射回来的时间计算喷头距喷涂物表面的距离,再通过机械操作臂进行控制,使得喷涂设备距喷涂物表面的距离始终保持一致,进一步使得喷涂设备喷涂更加均匀;
2、本发明通过将喷涂物放置在旋转盘表面,再通过固定器上设置的开孔,可以通过绳索将喷涂物固定在旋转盘表面更加稳定,使得喷涂设备在对喷涂物表面喷涂过程中,机械操作臂无法控制喷涂设备喷涂到的范围时,开启第三电机运行驱动第三转动轴连接着旋转盘转动,使得旋转盘上固定的喷涂物转动,进一步使得喷涂物表面可以达到喷涂设备的喷涂范围,使得喷涂物表面的涂料喷涂更加完整同时提高喷涂的便捷性;
3、本发明通过将喷涂物放置在固定装置上固定进行喷涂,在喷涂过程中,可以通过三组遮挡结构设置,使得挡板可以通过铰接轴在铰接块表面转动,使得挡板可以转动九十度与底座表面保持垂直,再通过第一支撑腿连接着第二支撑腿在固定块内通过固定轴铰接转动,使得第一支撑腿和第一支撑腿可以对挡板进行支撑,使得三组挡板在喷涂物表面形成一组墙壁,进一步使得喷涂设备喷涂过程中产生的涂料可以被挡板进行阻挡,防止扩散,并且开启水泵运行,可以将水箱内的纯净水从喷水头喷出,并且由于连接环设置为环状结构,使得喷水头喷出的纯净水在喷涂设备周围形成一堵水幕,进一步防止涂料扩散到空气内被人员吸入,造成身体危害,并且凝结状的涂料会被水幕冲刷到挡板表面被收集。
附图说明
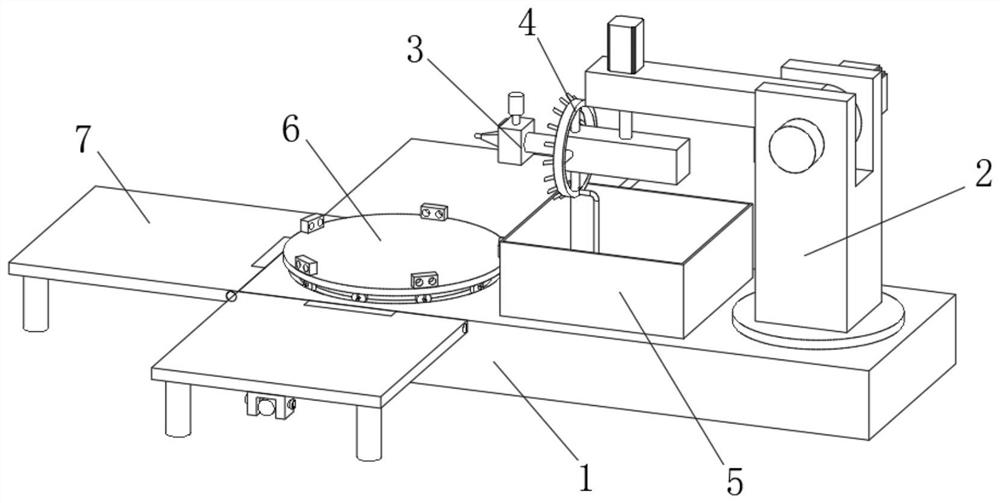
图1为本发明结构示意图;
图2为本发明俯视结构示意图;
图3为本发明侧视结构示意图;
图4为本发明结构示意图;
图5为本发明结构示意图;
图6为本发明结构示意图;
图7为本发明结构示意图;
图8为本发明结构示意图。
图中:1、底座;2、机械操作臂;201、基座;202、安装架;203、第一电机;204、第一转动轴;205、第一摆臂;206、第二电机;207、第二转动轴;208、第二摆臂;209、液压缸;210、伸缩杆;3、喷涂设备;301、喷涂装置;302、喷头;303、射线灯;304、接收器;305、输料管;306、涂料罐;4、喷水器;401、连接环;402、支架;403、喷水头;404、水管;405、水泵;5、水箱;6、固定装置;601、第三电机;602、第三转动轴;603、旋转盘;604、固定器;605、连接杆;606、安装轴;607、滑轮;7、遮挡结构;701、挡板;702、铰接轴;703、铰接块;704、支撑脚;705、固定块;706、固定轴;707、第一支撑腿;708、第二支撑腿;709、脚垫。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一
请参阅图1-8,本发明提供一种技术方案:
自动化喷涂的机器人装备,包括底座1,底座1的表面固定连接有机械操作臂2,机械操作臂2的表面固定连接有喷涂设备3,机械操作臂2的表面固定连接有喷水器4,底座1的表面固定连接有水箱5,底座1的表面安装有固定装置6,底座1的表面安装有遮挡结构7;
机械操作臂2包括基座201、第一电机203、第二电机206和液压缸209,基座201的表面固定连接有安装架202,安装架202的表面固定连接有第一电机203,第一电机203的内部安装有第一转动轴204,第一转动轴204的表面固定连接有第一摆臂205,第一摆臂205的表面固定连接有第二电机206,第二电机206的内部安装有第二转动轴207,第二转动轴207的一端贯穿第一摆臂205转动连接有第二摆臂208,第二摆臂208的内部安装有液压缸209,液压缸209的内部安装有伸缩杆210;
喷涂设备3包括喷涂装置301、射线灯303和接收器304,喷涂装置301的表面固定连接有喷头302,喷涂装置301的表面固定连接有射线灯303,喷涂装置301的表面固定连接有接收器304,喷涂装置301的顶端表面固定连接有输料管305,输料管305的一端固定连接有涂料罐306;
喷水器4包括连接环401和水泵405,连接环401的内壁固定连接有支架402,连接环401的表面固定连接有喷水头403,连接环401的内部插设有水管404,水管404的一端固定连接有水泵405。
实施例二,在实施例一的基础上,本发明提供一种技术方案:
自动化喷涂的机器人装备,包括底座1,底座1的表面设置有环形滑槽,底座1表面设置的环形滑槽圆心位置设置有开孔,通过底座1表面设置的滑槽,使得固定装置6安装在底座1上转动更加稳定快速,进一步使得固定装置6上固定的喷涂物可以更快速的调节喷涂面,使得喷涂设备3喷涂的更加完整均匀;
基座201固定连接在底座1的表面,基座201的圆心与底座1表面设置的环形滑槽圆心处于同一水平直线上,安装架202的顶端表面设置有开槽,安装架202表面设置的开槽两侧设置有铰接孔,第一转动轴204贯穿安装架202顶端表面设置的铰接孔转动连接第一摆臂205,第一摆臂205通过第一转动轴204铰接在安装架202顶端表面设置的开槽内,通过机械操作臂2的结构设置,可以对喷涂设备3进行水平转动、垂直转动和伸缩调节,使得喷涂设备3在喷涂过程中可以实时调节位置,进一步使得喷涂设备3与喷涂物的间距始终相等,从而使喷涂设备3的喷涂更加均匀完整;
喷涂装置301安装于伸缩杆210的一端,喷头302、射线灯303和接收器304均安装与喷涂装置301朝向固定装置6一侧的表面,接收器304垂直安装于射线灯303的上方,通过喷涂装置301在喷刷涂料过程中,通过射线灯303射出光线,光线会照射到喷涂物表面并被折射回来到接收器304表面被接受,通过光线折射回来的时间计算喷头302距喷涂物表面的距离,再通过机械操作臂2进行控制,使得喷涂设备3距喷涂物表面的距离始终保持一致,进一步使得喷涂设备3喷涂更加均匀;
连接环401设置为环形结构,连接环401的内部设置为镂空状,支架402设置为四组成圆周发布在连接环401的内壁上,四组支架402的一端分别固定连接在第二摆臂208的表面上,喷水头403设置为若干组成等距离圆周分布在连接环401朝向固定装置6的一侧表面,喷水头403设置为由内向外倾斜状,水泵405安装于水箱5内,通过开启水泵405运行,可以将水箱5内的纯净水从喷水头403喷出,并且由于连接环401设置为环状结构,使得喷水头403喷出的纯净水在喷涂设备3周围形成一堵水幕,进一步防止涂料扩散到空气内被人员吸入,造成身体危害,并且凝结状的涂料会被水幕冲刷到挡板701表面被收集;
固定装置6包括第三电机601和旋转盘603,第三电机601的内部安装有第三转动轴602,第三转动轴602的一端固定连接有旋转盘603,旋转盘603的顶端表面固定连接有固定器604,旋转盘603的底端表面固定连接有连接杆605,连接杆605的一端固定连接有安装轴606,安装轴606的表面套有滑轮607,第三电机601安装在底座1的底端表面上,第三转动轴602贯穿底座1表面环形滑槽中心位置的孔洞转动连接旋转盘603,旋转盘603的尺寸大小大于底座1表面设置的环形滑槽尺寸大小,通过第三电机601驱动第三转动轴602连接着旋转盘603在底座1表面转动,使得旋转盘603上固定的喷涂物可以进行转动,从而使喷涂物在喷涂过程中可以随时调节喷涂面,使得喷涂设备3喷涂更加完整,固定器604设置为五组呈等距离圆周分布在旋转盘603的表面边缘位置,固定器604的内部设置有两组孔洞,通过固定器604内部设置的孔洞,使得喷涂物放置在旋转盘603表面时,可以通过绳索和固定器604将喷涂物进行固定,使得旋转盘603在转动过程中喷涂物更加稳定,滑轮607通过安装轴606铰接在连接杆605上,滑轮607安装于底座1表面设置的环形滑槽内,通过滑轮607的设置,使得固定装置6在底座1上转动更加稳定快速,减小摩擦力;
遮挡结构7包括挡板701和脚垫709,挡板701的内部插设有铰接轴702,铰接轴702安装于铰接块703内,挡板701的表面固定连接有支撑脚704,挡板701的表面固定连接有固定块705,固定块705的内部插设有固定轴706,固定轴706的表面铰接有第一支撑腿707,第一支撑腿707的内部插设有第二支撑腿708,第二支撑腿708的一端固定连接有脚垫709,脚垫709的设置可以提高摩擦力,避免歪道,遮挡结构7设置为三组分别安装在固定装置6的周围,通过三组遮挡结构7在固定装置6的周围,使得三组遮挡结构7可以围成一组遮挡物在喷涂物表面,使得喷涂设备3对着喷涂物表面进行喷涂过程中产生的涂料可以被挡板701进行阻挡,防止扩散,挡板701的表面设置有开口,铰接块703安装于挡板701表面设置的开口位置,铰接块703固定连接在底座1的表面上,通过挡板701的铰接安装,使得挡板701放下时方便喷涂物装卸到固定装置6上,支撑脚704的长度大小等于底座1的高度大小,通过支撑脚704可以对放下的挡板701进行支撑,第一支撑腿707和第二支撑腿708之间通过活动卡扣进行限位连接,通过第一支撑腿707和第二支撑腿708的长度可调节,使得挡板701支撑起后可以对挡板701进行支撑加固。
工作原理:根据附图1-8所示,本发明的工作流程如下:
第一步:通过将喷涂物放置在旋转盘603上,再通过绳索和固定器604将喷涂物进行固定,同时挡板701可以通过铰接轴702再铰接块703上转动,使得挡板701可以转动九十度与底座1表面保持垂直,再通过第一支撑腿707连接着第二支撑腿708在固定块705内通过固定轴706铰接转动,使得第一支撑腿707和第一支撑腿707可以对挡板701进行支撑,使得三组挡板701在喷涂物表面形成一组墙壁,对固定装置6上固定的喷涂物进行格挡;
第二步:开启喷涂装置301运行对固定装置6上固定的喷涂物进行喷涂,同时在喷刷涂料过程中,通过射线灯303射出光线,光线会照射到喷涂物表面并被折射回来到接收器304表面被接受,通过光线折射回来的时间计算喷头302距喷涂物表面的距离,再通过开启机械操作臂2运行可以对喷涂设备3进行水平转动、垂直转动和伸缩调节,使得喷涂设备3在喷涂过程中可以实时调节位置,进一步使得喷涂设备3与喷涂物的间距始终相等,从而使喷涂设备3的喷涂更加均匀完整;
第三步:并且在喷涂过程中,开启水泵405运行,可以将水箱5内的纯净水从喷水头403喷出,并且由于连接环401设置为环状结构,使得喷水头403喷出的纯净水在喷涂设备3周围形成一堵水幕,进一步防止涂料扩散到空气内被人员吸入,造成身体危害,并且凝结状的涂料会被水幕冲刷到挡板701表面被收集。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下。由语句“包括一个......限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素”。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 自动化喷涂的机器人装备
- 自动化喷涂的机器人装备