一种基于视觉分析的咽拭子采样方法
文献发布时间:2023-06-19 11:24:21
技术领域
本发明属于咽拭子取样技术领域,尤其涉及一种基于视觉分析的咽拭子采样方法。
背景技术
在新冠肺炎救治过程中,咽部拭子采集是必不可少的一个环节,咽拭子采集细菌培养能分离出致病菌,是诊断新冠病毒感染最主要采样方法。目前,依靠人工取样的方式获取咽拭子,采集过程中,医务人员必须与患者近距离接触,患者咳嗽、用力呼吸等会产生大量飞沫或气溶胶,具有较高交叉感染的风险。
但现有的采样装置的采样步骤,存在以下问题:1、没有针对人的口腔特征来适配采样轨迹,使得所有人的采样轨迹都是一样的;2、采样力度无法实时调节,使得容易造成被采样者不适。
发明内容
本发明实施例提供一种基于视觉分析的咽拭子采样方法,用于至少解决上述技术问题之一。
本发明提供一种基于视觉分析的咽拭子采样方法,包括以下步骤:步骤1:多自由度机械臂夹持咽拭子,并伸入患者口腔中;步骤2:基于视觉采集模块扫描患者口腔环境,获取口腔点云数据,构建口腔三维场景;步骤3:对所述口腔三维场景进行视觉分析,以获取口腔中的小舌头、牙齿以及上颚器官的空间坐标;步骤4:依据小舌头、牙齿以及上颚器官的空间坐标,确定实时咽拭子的采样路径,并控制多自由度机械臂基于实时的采样路径进行采样操作,其中,预设的采样路径为:先将咽拭子斜向下插入到口腔中,躲开口腔中的小舌头,直达咽喉后壁左上方;将咽拭子从上至下运动,并且在运动过程中逆时针旋转90度,快速划过咽喉左后壁,重复一次;咽拭子此时在咽喉左下方,将咽拭子顺时针旋转90度;将咽拭子从最下方划到右下方,在运动的过程中逆时针旋转90度,重复一次;将咽拭子顺时针旋转90度,移动到咽喉后壁的右上方;将咽拭子从上至下运动,并且在运动过程中顺时针旋转90度,快速划过咽喉右后壁,重复一次。
在本发明的一些实施方式中,在咽拭子采样的过程中,控制所述多自由度机械臂的采用力度,以使咽拭子头部所受力度保持在0.4N-0.6N之间。
在本发明的一些实施方式中,在所述多自由度机械臂末端轴体上通过法兰盘安装有力传感器,所述力传感器通过IO接口实时的传回多自由度机械臂在工作中末端的力的数据信息,以使实时修正采样的力度。
在本发明的一些实施方式中,所述视觉采集模块为通过法兰盘安装在所述多自由度机械臂的抓手上的深度相机,通过扫描口腔环境,采集点云数据,对口腔场景建模,并将点云数据发送至控制端。
在本发明的一些实施方式中,在步骤4中,所述依据小舌头、牙齿以及上颚器官的空间坐标,确定实时咽拭子的采样路径包括:步骤4.1:以所述口腔三维场景的中心位置建立坐标系,则小舌头、牙齿以及上颚器官的标记为(x
本申请的基于视觉分析的咽拭子采样方法,设置预设的采样路径,通过实时获取待采样者口腔内的特征坐标与目标坐标进行比对,并计算差异度,使得能够进行实时修正预设的采样路径,使得能够依据待采样者的口腔特征进行实时采样,有效地提高了采用精度。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
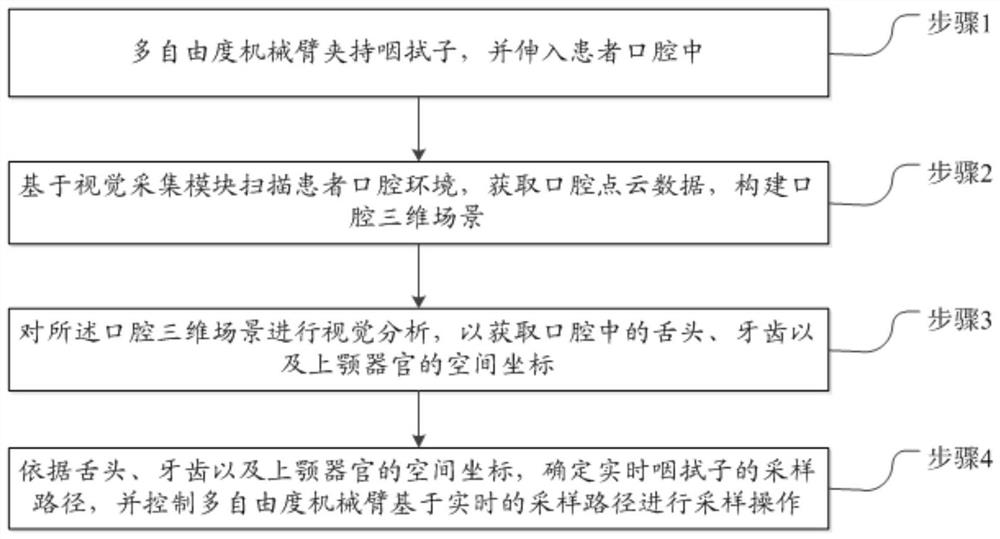
图1为本发明一实施例提供的一种基于视觉分析的咽拭子采样方法的流程图;
图2为本发明一实施例提供的又一种基于视觉分析的咽拭子采样方法的流程图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1,其示出了本申请的基于视觉分析的咽拭子采样方法一实施例的流程图。
如图1所示,在步骤1中,多自由度机械臂夹持咽拭子,并伸入患者口腔中;
在步骤2中,基于视觉采集模块扫描患者口腔环境,获取口腔点云数据,构建口腔三维场景;
在步骤3中,对口腔三维场景进行视觉分析,以获取口腔中的小舌头、牙齿以及上颚器官的空间坐标;
在步骤4中,依据小舌头、牙齿以及上颚器官的空间坐标,确定实时咽拭子的采样路径,并控制多自由度机械臂基于实时的采样路径进行采样操作,其中,预设的采样路径为:先将咽拭子斜向下插入到口腔中,躲开口腔中的小舌头,直达咽喉后壁左上方;将咽拭子从上至下运动,并且在运动过程中逆时针旋转90度,快速划过咽喉左后壁,重复一次;咽拭子此时在咽喉左下方,将咽拭子顺时针旋转90度;将咽拭子从最下方划到右下方,在运动的过程中逆时针旋转90度,重复一次;将咽拭子顺时针旋转90度,移动到咽喉后壁的右上方;将咽拭子从上至下运动,并且在运动过程中顺时针旋转90度,快速划过咽喉右后壁,重复一次。
在本实施例中,对于步骤1,采样装置控制多自由度机械臂夹持咽拭子,并伸入患者口腔中。之后,对于步骤2,采样装置基于视觉采集模块扫描患者口腔环境,获取口腔点云数据,构建口腔三维场景。之后,对于步骤3,采样装置对口腔三维场景进行视觉分析,以获取口腔中的小舌头、牙齿以及上颚器官的空间坐标。之后,对于步骤4,采样装置依据小舌头、牙齿以及上颚器官的空间坐标,确定实时咽拭子的采样路径,并控制多自由度机械臂基于实时的采样路径进行采样操作,其中,预设的采样路径为:先将咽拭子斜向下插入到口腔中,躲开口腔中的小舌头,直达咽喉后壁左上方;将咽拭子从上至下运动,并且在运动过程中逆时针旋转90度,快速划过咽喉左后壁,重复一次;咽拭子此时在咽喉左下方,将咽拭子顺时针旋转90度;将咽拭子从最下方划到右下方,在运动的过程中逆时针旋转90度,重复一次;将咽拭子顺时针旋转90度,移动到咽喉后壁的右上方;将咽拭子从上至下运动,并且在运动过程中顺时针旋转90度,快速划过咽喉右后壁,重复一次。
本实施提供的方法,设置预设的采样路径,使得采集部位统一,标准一致,采集上皮细胞数量大体一致,主要解决人工采样方法不标准,每个人的采样动作不一样,导致采样结果大不相同的问题,从而提高了采样准确度和一致性,而且通过实时获取待采样者口腔内的特征坐标与目标坐标进行比对,并计算差异度,使得能够进行实时修正预设的采样路径,使得能够依据待采样者的口腔特征进行实时采样,有效地提高了采用精度。
具体地,视觉采集模块为通过法兰盘安装在多自由度机械臂的抓手上的深度相机,通过扫描口腔环境,采集点云数据,对口腔场景建模,并将点云数据发送至控制端。
在一些可选的实施例中,在咽拭子采样的过程中,控制多自由度机械臂的采用力度,以使咽拭子头部所受力度保持在0.4N-0.6N之间。这样,避免采样力度过大使得容易造成被采样者不适。
在一些可选的实施例中,在多自由度机械臂末端轴体上通过法兰盘安装有力传感器,力传感器通过IO接口实时的传回多自由度机械臂在工作中末端的力的数据信息,以使实时修正采样的力度。这样,能够实时跟进采样力度值,从而防止在采样的过程,采样力度变化大,造成待采样者的不适度提升。
请参阅图2,其示出了本申请的基于视觉分析的咽拭子采样方法又一实施例的流程图。
如图2所示,在步骤4.1中,以口腔三维场景的中心位置建立坐标系,则小舌头、牙齿以及上颚器官的标记为(x
在步骤4.2中,判断实时获取的各个坐标与预设的目标坐标的差异度;
在步骤4.3中,基于差异度的结果,调整预设的采样路径,以得到实时的采样路径。
在本实施例中,对于步骤4.1,采样装置以口腔三维场景的中心位置建立坐标系,则小舌头、牙齿以及上颚器官的标记为(x
本实施的方法通过实时修正预设的采样路径,使得能够依据待采样者的口腔特征进行实时采样,有效地提高了采用精度。
需要说明的是,上述方法步骤并不用于限制各步骤的执行顺序,实际上,某些步骤可能会同时执行或者以与步骤限定的相反的顺序执行,本申请在此没有限制。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种基于视觉分析的咽拭子采样方法
- 一种基于无人机的智能视觉分析系统、智能视觉分析系统及方法