一种植保无人机的变幅度喷施装置及作业方法
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及一种航空喷施设备,具体涉及一种植保无人机的变幅度喷施装置及作业方法。
背景技术
近年来,由于植保无人机具有作业速度快,移动灵活,作业安全,不受地形环境因素影响且节能环保等优点,促使植保无人机航空喷施方式得到了迅速的应用和发展。
随着植保无人机的应用范围越来越大,其作业方式所存在的一些弊端也逐渐显露出来。其中,植保无人机所搭载的喷头大多是固定状态,均采用固定的喷幅宽度和喷施角度进行喷施作业,其有效喷幅、喷洒角度均无法根据作业情况实时调节;而植保无人机在施药过程中,由于作业参数和外界环境等条件的影响,导致喷施作业过程中容易发生重喷或漏喷等现象,施药精准度较差,难以达到较好的作业效果,从而降低植保无人机的作业效果。
发明内容
本发明目的在于克服现有技术的不足,提供一种植保无人机的变幅度喷施装置,该装置实现农药喷施的幅度可变,以适应不同作业环境,有利于提高喷施精准度。
本发明的第二目的在于提供一种植保无人机的变幅度喷施作业方法。
本发明的目的通过以下技术方案实现:
一种植保无人机的变幅度喷施装置,其特征在于,包括连接架、设置在连接架上衔接件、喷施组件、控制系统以及飞行参数监测系统,所述喷施组件转动连接在所述衔接件上,所述连接架设置在无人机的下方且与无人机的底壳连接,所述连接架上设有变幅驱动模块;所述变幅驱动模块包括驱动所述喷施组件在衔接件上摆动的偏摆驱动机构以及驱动所述衔接件沿水平方向旋转的转动驱动机构;所述喷施组件包括喷头,该喷头通过输药管与药箱连接;所述变幅驱动模块、喷施组件以及环境监测系统均与所述控制系统电连接。
上述植保无人机的变幅度喷施装置的工作原理是:
在喷施过程中,所述环境监测系统对作业环境进行检测,并将相关参数传输至控制系统中,控制系统根据所检测的参数,对喷施组件进行变幅度控制,以适应作业环境。具体地,当作业农田的大小发生变化时,在所述偏摆驱动机构的驱动下,所述喷施组件进行偏摆运动,实现喷施组件中的喷头角度的改变,从而实现喷施时的幅度发生变化,更加精准地进行农药航空雾化喷施,避免浪费农药或出现漏喷、重喷的现象。另外,还可根据实时的气候环境条件,在转动驱动机构的驱动下,带动喷施组件旋转,以改变喷施方向,从而适应喷施时的风速、无人机飞行时的气流或雨水等影响,有利于提高航空喷施的精准度,防止喷雾飘移。
本发明的一个优选方案,所述连接架包括固定横杆以及伸缩杆,所述连接架包括固定横杆以及伸缩杆,所述伸缩杆滑动连接在所述固定横杆上,所述固定横杆与无人机的底壳连接,所述变幅驱动模块还包括用于驱动所述伸缩杆滑动的伸缩驱动机构,所述伸缩驱动机构设置在固定横杆上,所述喷施组件设置在所述伸缩杆的外端上,所述伸缩驱动机构与所述控制系统电连接。
优选地,所述喷施组件设有多个,所述固定横杆上的伸缩杆也对应设有多个,所述多个喷施组件一一对应设置在所述多个伸缩杆的外端上。
本发明的一个优选方案,所述喷施组件还包括呈圆筒状的防护筒,所述喷头设置在所述防护筒内。
优选地,所述喷施组件还包括风扇,该风扇设置在所述喷头的上方。
优选地,所述防护筒内设有内筒,该内筒与防护筒的内壁之间留有通风间隙,所述风扇设置在所述内筒的上方;风扇运行时,通风间隙的末端形成包围雾滴的风幕。
一种植保无人机的变幅度喷施作业方法,其特征在于,植保无人机以速度v前进飞行;环境监测系统对环境及作业农田的条件进行检测,并将相关参数发送至控制系统;控制系统根据所接收的参数,对变幅驱动模块的偏摆驱动机构和转动驱动机构进行控制;其中,所述偏摆驱动机构驱动喷施组件以v
优选地,所述喷施组件设有两个,该两个喷施组件堆成分布设置在无人机机身的两侧;在喷施作业过程中,所述喷施组件进行偏摆运动的方向与水平方向的夹角为α,无人机的飞行速度v
优选地,所述环境监测系统包括飞行参数监测系统、障碍物监测系统及气象监测系统;所述飞行参数监测系统用于监测植保无人机喷施作业时的飞行速度及飞行高度;所述障碍物监测系统用于监测植保无人机喷施作业时周围的障碍物形状、大小及距离,所述气象监测系统用于监测植保无人机喷施作业时外界环境的风速及风向参数;所述控制系统根据所述环境监测系统监测得到的参数信息和实际作业情况对喷施组件和变幅驱动模块发送调节指令。
优选地,当植保无人机针对大田作物作业时,所述控制系统控制所述伸缩驱动机构驱动伸缩杆向两侧伸长,增大偏摆驱动机构对喷施组件的摆动角度和风扇的功率,以增加植保无人机喷施作业的有效幅宽;
当植保无人机针对果树作业时,所述控制系统控制所述伸缩驱动机构驱动伸缩杆向两侧伸缩以适应果树冠层宽度,同时,减小偏摆驱动机构对喷施组件的摆动角度,并增大风扇的功率,以保证植保无人机对果树冠层内部的正常着药;
当所述飞行参数监测系统监测到植保无人机作业速度或作业高度增大时,农作物冠层上方的旋翼风场减弱,此时增大风扇的功率,使喷出的雾滴在风扇风力的作用下精准到达农作物冠层,从而保证植保无人机对农作物的作业效果且减少雾滴的飘移;同时,调节喷施组件在无人机飞行方向上的旋转速度,以避免植保无人机出现重喷漏喷的现象;
当所述障碍物监测系统监测到植保无人机作业环境中的障碍物时,所述控制系统根据障碍监测系统获取的障碍物形状和大小,控制所述伸缩杆的伸缩,并基于障碍物的位置和距离,控制偏摆驱动机构和转动驱动机构对喷施组件的调整,以改变喷施组件的喷施方向,适应实时环境情况;同时控制风扇的功率以调节喷头喷出药液的射程,以完成对作业环境中障碍物周围的农作物进行高效喷施作业;
当所述气象监测系统监测到植保无人机作业环境中的气象参数发生变化时,所述控制系统根据获取的风速风向信息完成对所述喷施组件和变幅驱动模块的控制调节;当气象监测系统监测到植保无人机作业环境中外界风力较大时,所述控制系统增大风扇功率,以此降低雾滴漂移,增加无人机施药精准度。
本发明与现有技术相比具有以下有益效果:
1、本发明实现农药喷施的幅度可变,以适应不同作业环境,有利于提高喷施精准度。
2、当作业农田的大小发生变化时,在所述偏摆驱动机构的驱动下,所述喷施组件进行偏摆运动,实现喷施组件中的喷头角度的改变,从而实现喷施时的幅度发生变化,更加精准地进行农药航空雾化喷施,避免浪费农药或出现漏喷、重喷的现象。另外,还可根据实时的气候环境条件,在转动驱动机构的驱动下,带动喷施组件旋转,以改变喷施方向,从而适应喷施时的风速、无人机飞行时的气流或雨水等影响,有利于提高航空喷施的精准度,防止喷雾飘移。
3、本发明改变了传统的喷头和作业喷幅固定的作业模式,采用变幅驱动模块实现对喷施组件的动作调节,提高植保无人机的有效作业幅宽,从而大幅度提高植保无人机航空施药的作业效率。
附图说明
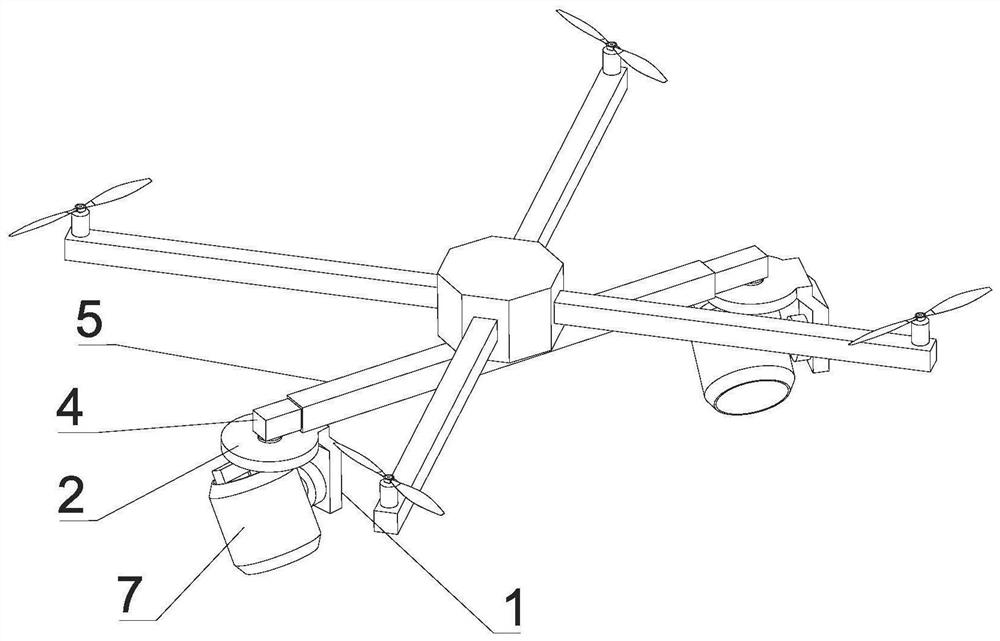
图1-图2为本发明的无人机的其中一种具体实施方式的结构示意图,其中,图1为主视图,图2为立体图。
图3-图5为喷施组件的结构示意图,其中,图3为仰视图,图4为立体图,图5为形成风幕时的立体示意图。
图6为喷施组件的运动过程示意图。
图7为喷施组件与无人机飞行速度的关系示意图。
具体实施方式
下面结合实施例和附图对本发明作进一步描述,但本发明的实施方式不仅限于此。
参见图1-图5,本实施例的植保无人机的变幅度喷施装置,包括连接架、设置在连接架上衔接件、喷施组件、控制系统以及飞行参数监测系统,所述喷施组件转动连接在所述衔接件上,所述连接架设置在无人机的下方且与无人机的底壳连接,所述连接架上设有变幅驱动模块;所述变幅驱动模块包括驱动所述喷施组件在衔接件上摆动的偏摆驱动机构6以及驱动所述衔接件沿水平方向旋转的转动驱动机构3;所述喷施组件包括喷头8,该喷头8通过输药管与药箱连接;所述变幅驱动模块、喷施组件以及环境监测系统均与所述控制系统电连接。
参见图1-图2,所述连接架包括固定横杆5以及伸缩杆4,所述伸缩杆4滑动连接在所述固定横杆5上,所述固定横杆5与无人机的底壳连接,所述变幅驱动模块还包括用于驱动所述伸缩杆4滑动的伸缩驱动机构,所述伸缩驱动机构设置在固定横杆5上,所述喷施组件设置在所述伸缩杆4的外端上,所述伸缩驱动机构与所述控制系统电连接。通过设置这样的连接架,实现对喷施组件的位置进行调节,以改变喷施组件位于无人机下方的相对位置,从而根据实际情况减少无人机所产生的气流对喷雾的影响,同时结合变幅驱动模块,对喷施组件的喷幅作进一步的调整,提高整个喷施装置的灵活性。
参见图1-图2,所述喷施组件设有多个,所述固定横杆5上的伸缩杆4也对应设有多个,所述多个喷施组件一一对应设置在所述多个伸缩杆4的外端上。这样,设置多个喷施组件,以增加农药喷施时的灵活性,进一步提高精准度和效率;伸缩杆4对应设有多个,能改变多个喷施组件之间的距离,在提高喷施效率的同时,结合无人机的飞行模式,有效避免农田重复喷施的情况,节省农药。
参见图1-图2,本实施例中,所述喷施组件设有两个,所述固定横杆5上的伸缩杆4也设有两个,两个喷施组件分别设置在两个伸缩杆4的外端上。设置两个喷施组件,以便对喷施幅度进行调整,以便实现作业农田的精准喷施。本实施例中,所述固定横杆5中空设置,所述两个伸缩杆4设置在所述固定横杆5内腔中,所述伸缩驱动机构为电动推杆。
参见图1-图4,所述喷施组件还包括呈圆筒状的防护筒7,所述喷头8设置在所述防护筒7内。通过防护筒7的设置,有效保护喷头8,并且在喷施农药过程中,让雾化喷出的农药在防护筒7的保护下,精准稳定下向下喷出,避免在喷出的瞬间就被外界气流影响而导致飘移,有利于提高农药喷施的精准度。
参见图3-图4,所述喷施组件还包括风扇9,该风扇9设置在所述喷头8的上方。这样,在喷施过程中,农药喷出后,在风扇9的作用下能够为喷出的雾滴提供定向的气流,让雾滴快速下降,减少外界风力对雾滴的影响,避免雾滴飘移,让农药雾滴能够快速、精准地降落在指定的作业农田上。
参见图3-图4,所述防护筒7内设有内筒10,该内筒10与防护筒7的内壁之间留有通风间隙11,所述风扇9设置在所述内筒10的上方;风扇9运行时,通风间隙11的末端形成包围雾滴的风幕。通过内筒10的设置,使得在喷施过程中,风扇9吹出的风在通风间隙11的作用下形成筒型的风幕,此时喷头8喷出的雾滴则位于风幕内;这样,使得喷出的雾滴在离开防护筒7后,得到风幕的保护,避免外界的气流影响,降低飘移影响,在风幕的保护下,有利于雾滴快速且精准地下降到作业农田上,提高航空喷施精准度。本实施例中,所述内筒10与防护筒7支架的通风间隙11,可根据实际情况进行调整,通过改变内筒10的位置,从而改变所述通风间隙11的大小,进而实现对形成风幕的大小调整。
参见图1-图2,所述衔接件包括顶部连接板2和侧部连接板1,所述顶部连接板2和侧部连接板1相互垂直设置,且呈“7”字型设置;所述顶部连接板2与所述连接架(伸缩杆4的外端)转动连接,所述喷施组件的圆筒侧壁与所述侧部连接板1转动连接。本实施例中,所述转动驱动机构3设置在所述顶部连接板2的外端上,以便对衔接件进行转动驱动;所述偏摆驱动机构6设置在所述侧部连接板1上,以便对喷施组件进行偏摆驱动;本实施例的转动驱动机构3和偏摆驱动机构6均采用隐藏式的安装方式进行组装。通过设置这样的衔接件,结构简单,便于喷施组件的安装,且便于喷施组件进行偏摆运动,以实现喷施的幅度变化。
参见图1-图7,本实施例的植保无人机的变幅度喷施装置的工作原理是:
在喷施过程中,所述环境监测系统对作业环境进行检测,并将相关参数传输至控制系统中,控制系统根据所检测的参数,对喷施组件进行变幅度控制,以适应作业环境。具体地,当作业农田的大小发生变化时,在所述偏摆驱动机构6的驱动下,所述喷施组件进行偏摆运动,实现喷施组件中的喷头8角度的改变,从而实现喷施时的幅度发生变化,更加精准地进行农药航空雾化喷施,避免浪费农药或出现漏喷、重喷的现象。另外,还可根据实时的气候环境条件,在转动驱动机构3的驱动下,带动喷施组件旋转,以改变喷施方向,从而适应喷施时的风速、无人机飞行时的气流或雨水等影响,有利于提高航空喷施的精准度,防止喷雾飘移。
本实施例的植保无人机的变幅度喷施装置具有以下有益效果:
1、本实施例改变了传统的喷头8和作业喷幅固定的作业模式,采用变幅驱动模块实现对喷雾执行系统的动作调节,可通过控制伸缩杆4的伸展和衔接件的转动角度提高植保无人机的有效作业幅宽,从而大幅度提高植保无人机航空施药的作业效率。
2、本实施例在植保无人机喷头8上方设置风扇9,通过风扇9的定向气流,结合通风间隙11所形成的风幕,可有效促进喷施雾滴的沉积,减少雾滴飘移,提高植保无人机航空施药的作业效果。
3、本实施例通过环境监测系统监测植保无人机作业参数和环境参数的变化,实时变幅驱动模块的动作和风扇9的功率,使其保证植保无人机在飞行参数或外界风速风向变化时仍能进行有效喷施作业,对环境变化的适应能力强。
4、本实施例通过调节伸缩杆4的长度、变幅驱动模块以及风扇9的功率,使植保无人机在喷施作业时能完成对农田中的障碍物附件区域进行有效喷施作业,不仅不会出现漏喷等现象,还可保障植保无人机的作业安全。
5、本发明采用机械结构与相应材质进行结合,通过风扇9和通风间隙11形成的风幕,大幅度减小喷施过程中的雾滴漂移;并且结合可调整的通风间隙11,适应不同环境和喷施对象。
本实施例还公开一种植保无人机的变幅度喷施作业方法,包括以下步骤:无人机以速度v前进飞行;环境监测系统对环境及作业农田的条件进行检测,并将相关参数发送至控制系统;控制系统根据所接收的参数,对变幅驱动模块的偏摆驱动机构6和转动驱动机构3进行控制;其中,所述偏摆驱动机构6驱动喷施组件以v
参见图7,所述喷施组件设有两个,该两个喷施组件堆成分布设置在无人机机身的两侧;在喷施作业过程中,所述喷施组件进行偏摆运动的方向与水平方向的夹角为d,无人机的飞行速度v
这样,通过对无人机的飞行速度和喷施组件的偏摆速度进行限定,有效保证喷施作业区域无漏喷或重喷现象发生,有利于提高喷施作业的精度和避免浪费农药。
本实施例的环境监测系统包括飞行参数监测系统、障碍物监测系统及气象监测系统;飞行参数监测系统用于监测植保无人机喷施作业时的飞行速度、飞行高度,障碍物监测系统用于监测植保无人机喷施作业时周围的障碍物形状、大小及距离等,气象监测系统用于监测植保无人机喷施作业时外界环境的风速、风向等参数;所述控制系统可根据所述环境监测系统监测得到的参数信息和实际作业情况对喷施组件和变幅驱动模块发送调节指令。
具体地,当植保无人机针对大田作物作业时,所述控制系统控制所述伸缩驱动机构驱动伸缩杆4件向两侧伸长,同时,增大偏摆驱动机构6对喷施组件的摆动角度和风扇9的功率,以增加植保无人机喷施作业的有效幅宽;同时,还可扩大所述通风间隙11,使得形成的风幕对雾滴进行保护,以减少外界风场的影响,从而提高植保无人机对大田作物的作业效率且减少雾滴的飘移。
具体地,当植保无人机针对果树作业时,所述控制系统控制所述伸缩驱动机构驱动伸缩杆4向两侧伸缩以适应果树冠层宽度,同时,减小偏摆驱动机构6对喷施组件的摆动角度,并增大风扇9的功率,以保证植保无人机对果树冠层内部的正常着药。
具体地,当所述飞行参数监测系统监测到植保无人机作业速度或作业高度增大时,农作物冠层上方的旋翼风场减弱,此时,需增大风扇9的功率,使喷出的雾滴在风扇9风力的作用下精准的到达农作物冠层,从而保证植保无人机对农作物的作业效果且减少雾滴的飘移;同时,需调节喷施组件在无人机飞行方向上的旋转速度,以避免植保无人机出现重喷漏喷的现象。
具体地,当所述障碍物监测系统监测到植保无人机作业环境中的障碍物时,所述控制系统根据障碍监测系统获取的障碍物形状和大小,控制所述伸缩杆4的伸缩,并基于障碍物的位置和距离,控制偏摆驱动机构6和转动驱动机构3对喷施组件的调整,以改变喷施组件的喷施方向,适应实时环境情况;同时控制风扇9的功率以调节喷头8喷出药液的射程,以完成对作业环境中障碍物周围的农作物进行高效喷施作业。
具体地,当所述气象监测系统监测到植保无人机作业环境中的气象参数发生变化时,所述控制系统根据获取的风速风向信息完成对所述喷施组件和变幅驱动模块的控制调节;当气象监测系统监测到植保无人机作业环境中外界风力较大时,所述控制系统增大风扇9功率,提高风幕强度,以此降低雾滴漂移,增加无人机施药精准度。
参见图6,另外,对于本实施例的作业方法,所述偏摆驱动机构6和转动驱动机构3控制喷施组件旋转运动的周期为:当植保无人机以飞行速度v开始前进喷雾作业时,设偏摆驱动机构6控制喷施组件以v
本实施例还公开一种植保无人机,该植保无人机包括本实施例的变幅度喷施装置,该变幅度喷施装置设置在底壳下方。
上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其他的任何未背离本发明的精神实质与原理下所做的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
- 一种植保无人机的变幅度喷施装置及作业方法
- 一种基于无线传感器网络的植保无人机喷施作业方法