一种具备抛放救生圈功能的无人机
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及无人机技术领域,尤其涉及一种具备抛放救生圈功能的海上智能无人机。
背景技术
无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备,地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输,可在无线电遥控下像普通飞机一样起飞或用助推火箭发射升空,也可由母机带到空中投放飞行,回收时,可用与普通飞机着陆过程一样的方式自动着陆,也可通过遥控用降落伞或拦网回收,可反复使用多次,广泛用于空中侦察、监视、通信、反潜、电子干扰等。
海上智能无人机通常用于救援勘探等工作,现有的海上智能无人机在使用的过程中,不具备对救生圈进行投放的功能,通常需要使用者借助专用设备进行,或驾驶船只进行救援,由于落水者距离较远,救援太长会导致救援成功的几率下降,所以目前的无人机亟需一种可以对救生圈进行快速投放的功能。
发明内容
本发明提出了一种具备抛放救生圈功能的无人机,通过救生圈投放系统获取救援区域内落水者的救援情况信息以及位置信息,从而控制无人机飞行至落水者上方,并定位投放救生圈,提高了救援速度。
为了达到上述目的,本发明提出了一种具备抛放救生圈功能的无人机,包含:
无人机机体;
位于无人机机体内的救生圈投放系统,所述救生圈投放系统用于根据落水者的救援情况及其位置信息生成控制指令与投放指令,从而控制无人机飞行并实现救生圈定位投放;
固定连接在无人机机体底部的投放机构,所述投放机构用于根据所述救生圈投放系统的投放指令投放救生圈。
进一步地,所述无人机机体的表面设有多个支架,所述支架上设有多个闪光灯,以便于对远方的救援人员进行位置的提示。
进一步地,所述无人机机体的底部设有多个支腿,所述支腿的底部固定连接有漂浮结构,以保证无人机坠落后漂浮于海面。
进一步地,所述救生圈投放系统,包含:
图像处理模块,其用于实时采集救援区域内的图像,并分析是否需要对救援区域内的落水者进行救援,从而生成落水者的救援情况信息;
GIS地理信息模块,其用于定位救援区域内落水者的地理位置,从而生成落水者的位置信息;
控制终端,其分别与所述图像处理模块及所述GIS地理信息模块连接,用于根据落水者的救援情况信息以及其位置信息生成控制指令及投放指令;
驱动模块,其与所述控制终端连接,其用于根据所述控制指令驱动无人机飞行;
救生圈投放模块,其与所述控制终端连接,用于根据所述投放指令驱动投放机构进行救生圈的投放。
进一步地,所述救生圈投放系统还包括:
电源模块,其用于为救生圈投放系统提供电能;
灯光控制模块,其分别与所述控制终端以及安装在无人机机体上的闪光灯连接,用于根据控制终端的控制指令控制闪光灯的运行。
进一步地,所述救生圈投放系统还包括相互连接的无线传输模块以及远程控制模块;所述无线传输模块与所述控制终端连接,所述远程控制模块与用户端连接,所述无线传输模块及远程控制模块用于实现用户端与控制终端的信息交互以及指令交互。
进一步地,所述图像处理模块包括:
图像采集模块,其用于实时采集救援区域内的图像;
图像分析模块,其与所述图像采集模块连接,用于对所述图像进行分析以判断是否对救援区域内的落水者进行救援;
信息反馈模块,其与所述图像分析模块连接,用于将所述图像分析模块的分析结果发送给控制终端;
储存模块,其与所述图像分析模块连接,用于存储所采集的图像以其分析结果。
进一步地,所述图像采集模块包含安装在所述无人机机体底部的摄像机以及照明单元,所述照明单元用于为所述摄像机照明,以便于夜间救援。
进一步地,所述投放机构,包括:
壳体,所述壳体的顶部与所述无人机机体的底部固定连接;
固定在所述壳体第一端的电机,所述电机还与所述救生圈投放系统中的救生圈投放模块连接;
与所述电机连接的螺纹杆,所述螺纹杆还通过轴承与所述壳体的第二端固定连接,所述螺纹杆在所述的电机的作用下转动;
分别安装在所述螺纹杆上的两个螺纹套,两个所述螺纹套在所述螺纹杆的作用下背向移动;
分别固定安装在每个所述螺纹套底部的两个连杆组件,所述连杆组件跟随所述螺纹套做相同方向上的移动;
分别固定安装在每个连杆组件底部的用于夹持救生圈的两个夹具,两个所述夹具跟随所述连杆组件移动从而投放救生圈。
进一步地,所述两个螺纹套的内壁的螺纹开设方向相反,且螺纹间距相等。
进一步地,所述壳体的第一端设有旋转孔,所述螺纹杆通过所述旋转孔与所述电机固定连接。
进一步地,所述壳体的底部设有移动孔,所述连杆组件通过所述移动孔与所述螺纹套连接。
本发明具有以下优势:
本发明通过救生圈投放系统获取救援区域内落水者的救援情况信息以及位置信息,从而控制无人机飞行至落水者上方,并定位投放救生圈,提高了救援速度;本发明在无人机机体上设有闪光灯以及漂浮结构,便于提示救援人员落水者的位置,并保证无人机在恶劣环境下发生坠落时漂浮于海面,提高无人机的使用寿命。此外,本发明的投放机构中,螺纹杆通过设置在壳体上的旋转孔与投放机构中的电机固定连接,避免螺纹杆与壳体发生卡死现象而导致夹具不释放救生圈,保障了救生圈定位投放。
附图说明
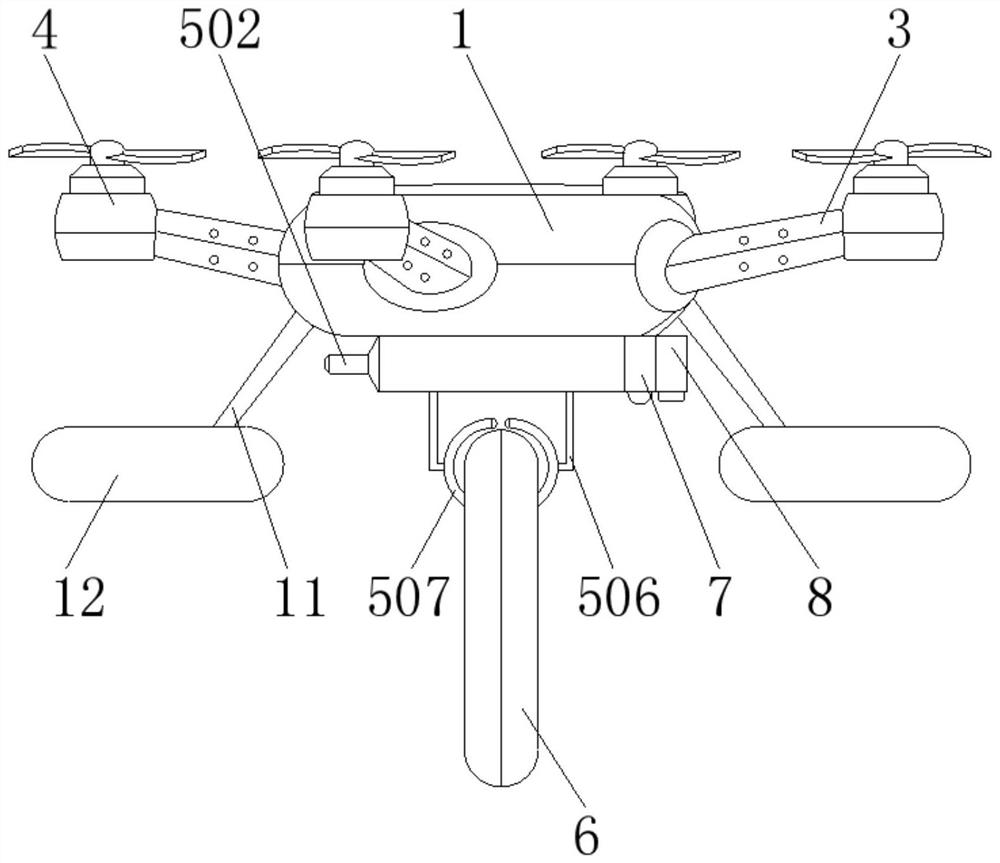
图1为本发明的无人机的结构示意图;
图2为支架与闪光灯的结构示意图;
图3为支腿与漂浮结构的结构示意图;
图4为救生圈投放系统的结构示意图;
图5为投放机构的结构示意图;
图6为夹具的结构示意图。
具体实施方式
以下结合附图和具体实施例对本发明作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比率,仅用以方便、明晰地辅助说明本发明实施例的目的。
如图1所示,一种具备抛放救生圈功能的无人机,包含:
无人机机体1;
位于无人机机体1内的救生圈投放系统2,所述救生圈投放系统2用于根据落水者的救援情况及其位置信息生成控制指令与投放指令,从而控制无人机飞行并实现救生圈定位投放;
固定连接在无人机机体1底部的投放机构5,所述投放机构5用于根据所述救生圈投放系统2的投放指令投放救生圈6。
如图2-3所示,无人机机体1的表面设有多个支架3,所述支架3远离无人机机体1的一端固定连接有机翼4。所述支架3上设有多个闪光灯13,以便于对救援人员进行位置的提示。优选地,所述闪光灯13均匀分布在所述支架3表面。优选地,所述闪光灯13采用LED三色灯。所述无人机机体1的底部设有多个支腿11,所述支腿11的底部固定连接有漂浮结构12。优选地,所述漂浮结构12采用气囊。通过支腿11漂浮结构12的使用,可以保证恶劣环境下无人机发生坠落时漂浮于海面,而不是直接沉没于海里,提高了无人机的使用寿命。
如图4所示,所述救生圈投放系统2,包含:
电源模块201,其用于为所述救生圈投放系统2供电;
图像处理模块202,其用于实时采集救援区域内的图像,并分析是否需要对救援区域内的落水者进行救援,从而生成落水者的救援情况信息;
GIS地理信息模块203,其用于定位救援区域内落水者的地理位置,从而生成落水者的位置信息;
控制终端204,其分别与所述图像处理模块202及所述GIS地理信息模块203连接,用于根据落水者的救援情况信息以及其位置信息生成控制指令及投放指令;
驱动模块205,其与所述控制终端204连接,其用于根据所述控制指令驱动无人机飞行;所述驱动模块205与所述无人机机体1的机翼4连接,从而控制无人机飞行至落水者上方;
救生圈投放模块206,其与所述控制终端204连接,用于根据所述投放指令驱动投放机构5进行救生圈6的投放;
灯光控制模块207,其分别与所述控制终端204以及安装在无人机机体1上的闪光灯13连接,用于根据所述控制指令控制闪光灯13的运行。
此外,所述救生圈投放系统2还包括:相互连接的无线传输模块208以及远程控制模块209;所述无线传输模块208与所述控制终端204连接,所述远程控制模块209与用户端连接,所述无线传输模块208及远程控制模块209用于实现用户端与救生圈投放系统2的信息交互以及指令交互。具体地,所述远程控制模块209将所述图像处理模块202采集的图像通过无线传输模块208及远程控制模块209传送给用户端,以便于救援人员实时观察救援区域的图像以及救援情况;所述远程控制模块209还通过所述无线传输模块208以及远程控制模块209接收用户端发送的控制指令以及投放指令,从而控制无人机飞行到救援区域,并定位投放救生圈6。
所述图像处理模块202包括:
图像采集模块210,其用于实时采集救援区域内的图像;所述图像采集模块210包含安装在所述无人机机体1底部的摄像机7以及照明单元8,所述照明单元8用于为所述摄像机7照明,以便于夜间救援;所述照明单元8还与所述灯光控制模块207连接,所述灯光控制模块207还用于根据控制指令控制所述照明单元8的运行;
图像分析模块211,其与所述图像采集模块210连接,用于对所述图像进行分析以判断是否对救援区域内的落水者进行救援;
信息反馈模块212,其与所述图像分析模块211连接,用于将所述图像分析模块211的分析结果发送给控制终端204;
储存模块213,其与所述图像分析模块211连接,用于存储所采集的图像以及分析结果。
如图5-6所示,所述投放机构5,包括:
壳体501,所述壳体501的顶部与所述无人机机体1的底部固定连接;
固定在所述壳体501第一端的电机502,所述电机502还与所述救生圈投放系统2中的救生圈投放模块206连接;所述救生圈投放模块206用于控制所述电机502运行;
与所述电机502连接的螺纹杆503,所述螺纹杆503还通过轴承508与所述壳体501的第二端固定连接;所述螺纹杆503位于所述壳体501内,壳体501的第一端设有与所述螺纹杆503相匹配的旋转孔10,所述螺纹杆503的第一端通过所述旋转孔10与所述电机502固定连接,从而避免所述螺纹杆503与所述壳体501发生卡死现象,提高了螺纹杆503的转动速度;所述螺纹杆503的第二端与所述轴承508的内圈固定连接,所述轴承508的外圈固定在所述壳体501的第二端,所述电机502运行时,所述螺纹杆503在所述电机502的作用下发生转动;
分别安装在所述螺纹杆503上的两个螺纹套504;两个所述螺纹套504内壁的螺纹开设方向相反,且螺纹间距相等,两个所述螺纹套504在所述螺纹杆503的作用下,在所述螺纹杆503上背向等距移动;
分别固定安装在每个所述螺纹套504底部的两个连杆组件,所述连杆组件跟随所述螺纹套504同步移动,即两个所述连杆组件在两个螺纹套504的作用下背向等距移动;所述连杆组件包含移动杆505和连接杆506,所述壳体501的底部设有移动孔9,所述移动孔9的宽度与所述移动杆505的尺寸相匹配,所述移动杆505的一端穿过所述移动孔9与所述螺纹套504固定连接,所述移动杆505的另一端与所述连接杆506固定连接;
分别固定安装在每个连杆组件底部的用于夹持救生圈6的两个夹具507;所述夹具507采用半圆形,两个夹具507形成圆形结构悬挂救生圈6;投放救生圈6时,所述夹具507跟随所述连杆组件移动同步移动,即两个夹具507在连杆组件的作用下背向等距移动,从而释放救生圈6。
本发明的工作原理为:
救生圈投放系统2采集救援区域内的图像并分析是否进行救援,生成落水者的救援情况信息,同时将采采集的图像无线传输给用户端,以便于救援人员实时观察救援区域的图像以及救援情况。所述救生圈投放系统2根据落水者的救援情况信息以及位置信息生成控制指令及投放指令,并分别发送给所述驱动模块205、救生圈投放模块206以及灯光控制模块207;所述驱动模块205驱动无人机机体1上的机翼4,控制无人机飞行到落水者上方;所述救生圈投放模块206控制所述投放机构5中的电机502运行,电机502运行带动所述螺纹杆503转动,安装在所述螺纹杆503上的两个螺纹套504背向等距移动,并带动移动组件以及固定在移动组件底部的夹具507背向等距移动,救生圈6脱落,实现救生圈6的定位投放,提高救援效率;所述灯光控制模块207控制安装在无人机机体1上的闪光灯13运行,从而提示落水者位置。所述救生圈投放系统2还用于接收用户端发送的控制指令以及投放指令,实现无人机的智能操作。尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
- 一种具备抛放救生圈功能的无人机
- 一种带有故障后自动抛伞功能的阻力伞抛放机构