送料装置
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及物料搬运的技术领域,尤其涉及一种送料装置。
背景技术
随着工业科技的发展,对产能的要求也逐渐提高。在工业生产中尤其是PCB钻孔的生产中,PCB板料在经过一个流程后,需将PCB板料搬运至下一个流程进行作业。
现有技术中,主要通过人工对PCB板料进行搬运,采用这样的方式不仅工作效率低而且浪费人力。
发明内容
基于此,有必要提供一种能够自动搬运以及输出物料的送料装置。
一种送料装置,包括:
料框,用于层叠放置多个物料;
升降机构,用于驱动所述料框上升或下降;
推出机构,用于将所述料框内的所述物料依次推出;
移动机构,能够驱动所述料框、所述升降机构及所述推出机构移动至指定位置;
当所述料框、所述升降机构及所述推出机构在所述移动机构的驱动下移动至指定位置后,所述升降机构驱动所述料框升降至其中一个所述物料与所述推出机构正对的位置,以便于所述推出机构将所述物料由所述料框推出。
采用本发明实施例提供的送料装置,移动机构工作以使得放置有多个物料的送料装置移动至指定位置,升降机构驱动该料框上升或者下降,以使得其中一个物料与推出机构正对。接着推出机构工作以将与其正对的物料推出。升降机构继续驱动料框上升或者下降,以使得其它物料与推出机构正对,以使得推出机构依次将料框内的物料推出。采用上述提供的送料装置,通过移动机构实现物料的搬运,再通过升降机构与推出机构的配合以送出物料。如此,不仅提高生产的效率,而且无需浪费人力。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
其中:
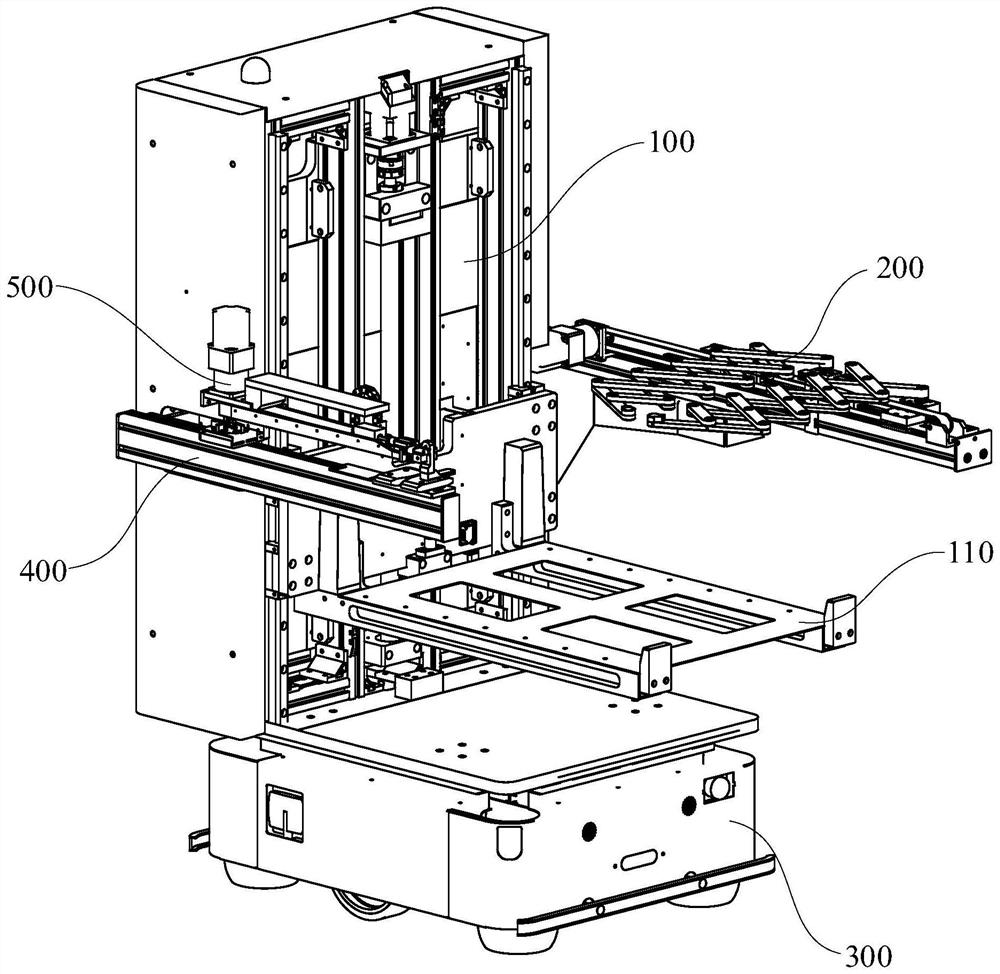
图1为一实施例提供的送料装置的部分立体结构示意图。
图2为如图1提供的送料装置的升降机构的立体结构示意图。
图3为如图1提供的送料装置的推出机构的立体结构示意图。
图4为如图1提供的送料装置的定向机构与回收机构的装配示意图。
图5为一实施例提供的料框的立体结构示意图。
附图标记:
10-物料;
100-升降机构,110-承载件,120-导向块,130-定位轴,140-限位件,150-第四动力元件,160-第二导轨,170-第二滑块;
200-推出机构,210-连杆伸缩结构,212-第一驱动端,214-第二驱动端,216-推送端,220-同步带,230-第一动力元件,240-主动轮,250-从动轮,260-第一滑块,270-第一导轨;
300-移动机构;
400-定向机构,410-定位块,420-间隔,430-安装件;
500-回收机构,510-摆臂,520-第二动力元件,530-推块,540-第三动力元件;
600-料框,610-滑轮,620-定位孔。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后……)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果所述特定姿态发生改变时,则所述方向性指示也相应地随之改变。
另外,在本发明中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个所述特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
请参阅图1和图5,本发明一实施例提供一种送料装置,包括用于层叠放置多个物料10的料框600、用于驱动料框600上升或下降的升降机构100、用于将料框600内的物料10依次推出的推出机构200以及能够移动至指定位置的移动机构300。当移动机构300移动至指定位置后,升降机构100驱动料框600升降,以便于推出机构200将相应的物料10由料框600推出。
具体地,送料装置的工作流程如下:移动机构300工作以使得放置送料装置整体移动至指定位置,升降机构100驱动该料框600上升或者下降,以使得其中一个物料10与推出机构200正对。接着推出机构200工作以将与其正对的物料10推出。升降机构100继续驱动料框600上升或者下降,以使得其它物料10与推出机构200正对,方便推出机构200将料框600内的物料10依次推出。
采用上述提供的送料装置,通过移动机构300实现物料10的整体搬运,再通过升降机构100与推出机构200的配合以送出物料10。如此,不仅提高生产的效率,而且节约人力。
请参阅图3,推出机构200包括连杆伸缩结构210,连杆伸缩结构210包括第一驱动端212、第二驱动端214以及推送端216。当第一驱动端212与第二驱动端214相互靠近时,连杆伸缩结构210伸长以使得推送端216抵接物料10并将物料10推出;当第一驱动端212与第二驱动端214相互远离时,连杆伸缩结构210回缩以使得推送端216远离物料10。
在其它实施例中,推出机构200为具有伸缩活塞杆的液压杆或者气缸,该推出机构200通过伸缩活塞杆直接将物料10推出。当然,该推出机构200还可以为电机、丝杆、推块的结构,于此不具体进行阐述。
可以理解的是,在本实施例中,连杆伸缩结构210由多个平行四边形连杆组成,通过移动第一驱动端212与第二驱动端214以使得连杆伸缩结构210伸缩,从而获得较大的位移。采用该结构,无需占用过多的空间,且便于维修。
进一步地,推出机构200还包括可转动的同步带220,第一驱动端212固定设置,第二驱动端214与同步带220连接。采用该结构,可便于调节第一驱动端212与第二驱动端214之间的距离,从而实现连杆伸缩结构210的伸缩。
进一步地,连杆伸缩结构210的数量为两个,当同步带220转动时,两个连杆伸缩结构210同步伸长或者回缩。通过两个连杆伸缩结构210推出物料10,可使得物料10的运动更为稳定,同时也可增强对物料10所施加的推力。
可以理解的是,同步带220包括运动速度相同方向相反的第一层带以及第二层带,第一层带与第二层带正对设置。在本实施例中,两个连杆伸缩结构210的第一驱动端212相对靠近设置,两个第二驱动端214相对远离设置。且两个第二驱动端214分别与第一层带以及第二层带固定连接。在其它实施例中,其中一个连杆伸缩结构210的第一驱动端212与另一个连杆伸缩结构210的第二驱动端214相对靠近设置。且两个第二驱动端214均固定于第一层带或者第二层带上。
具体地,推出机构200还包括具有输出轴的第一动力元件230、与第一动力元件230的输出轴连接的主动轮240、与主动轮240相对布置的从动轮250、与第二驱动端214连接的第一滑块260以及与第一滑块260滑动连接的第一导轨270,同步带220套设于主动轮240以及从动轮250上。第一动力元件230驱动与其相连的主动轮240转动,从动轮250与主动轮240皆与同步带220传动连接,主动轮240带动同步带220转动,同步带220转动继而使得第一滑块260在第一导轨270上移动,滑动移动驱动连杆伸缩结构210伸缩。
另外,在本实施例中,该第一动力元件230为用于输出扭矩的电机。
在另一中实施例中,第一滑块260直接与直线电机连接,以使得第一滑块260在第一导轨270上运动。
请参阅图2,升降机构100包括可升降运动且用于承载料框600的承载件110,承载件110上设有两个相对设置的导向块120,料框600上设有两个与导向块120对应的滑轮610,两个滑轮610可沿导向块120滑动且设置于导向块120相对或相背的两侧。
请参阅图5,需要补充的是,料框600可拆卸设置在升降机构100上,以便于对料框600进行清洗、维修、放置或取出物料10。装配料框600时,料框600朝导向块120的延伸方向靠近承载件110,接着滑轮610与导向块120的表面接触,并于导向块120上滑动,使得两个滑轮610与两个导向块120配合以对料框600进行限位。
另外,承载件110的边缘部分设有限位件140,该限位件140用于对料框600进行限位。
请继续参阅图5,承载件110上还设有定位轴130,料框600上设有与定位轴130适配的定位孔620,且定位轴130的延伸方向与导向块120的延伸方向一致。在滑轮610沿导向块120滑动的过程中,承载件110上的定位轴130嵌入料框600上的定位孔620中。如此,可进一步限制料框600的自由度,以使得料框600稳定地固定于升降机构100上。
请参阅图4,送料装置还包括与推出机构200正对的定向机构400,定向机构400包括两个间隔420设置的定位块410,间隔420沿物料10的推出方向延伸,间隔420用于对物料10的推出进行导向。可以理解的是,物料10上设有定位件,该定位件用于与该间隔420配合以对物料10运动进行导向。
需要补充的是,该定向机构400还包括安装件430,该安装件430水平贴合料框600的侧壁,两个定位块410皆安装于该安装件430上。当需要推出物料10时,升降机构100驱动料框600升降,以使得待推出的物料10与定向机构400平齐,并使得该物料10上的定位件嵌入该间隔420。接着推出机构200工作以将物料10沿着间隔420的延伸方向推出。
请继续参阅图4,送料装置还包括回收机构500,当物料10沿间隔420的延伸方向进入料框600且未完全进入时,回收机构500将物料10完全推入料框600。
可以理解的是,回收物料10即将物料10放入料框600时,物料10沿间隔420的延伸方向进入料框600但未完全进入时,该回收机构500工作以将该物料10推入料框600。
在一种实施方式中,回收物料10与推出物料10同步进行。
具体地,升降机构100驱动料框600升降以使得其中一个物料10与推出机构200以及定向机构400正对,推出机构200再将该物料10推出。接着,操作人员或者其它设备将待回收的物料10沿着间隔420的延伸方向部分进入该料框600。最后,回收机构500工作,以将该待回收的物料10推入料框600。重复多次后,该送料装置完成对物料10的推出以及对于物料10的回收。
在本实施例中,回收机构500包括摆臂510、用于驱动摆臂510转动的第二动力元件520、可转动设置于摆臂510远离第二动力元件520的一端的推块530以及用于驱动推块530转动的第三动力元件540。
需要说明的是,该回收机构500安装于定向机构400的上方或者下方,闲置状态时,该推块530倾斜设置。当回收机构500工作时,第二动力元件520驱动摆臂510转动,以使得摆臂510的延伸方向与间隔420的延伸方向一致。接着,第三动力元件540驱动推块530,推块530在该作用力下转为竖直状态以便于抵接待回收的物料10。第二动力元件520再驱动摆臂510回转,推块530与待回收物料10抵接并使得待回收物料10完全进入料框600。
在本实施例中,第二动力元件520为输出扭矩的电机,第三动力元件540为气缸或者是液压缸。
另外,升降机构100具体包括第四动力元件150、竖直延伸的丝杆、移动螺母、第二滑块170以及第二导轨160。第四动力元件150与丝杆传动连接,移动螺母套设在丝杆上且与丝杆螺纹连接,移动螺母与承载件110连接以驱动承载件110升降。该承载件110与可滑动设置在第二导轨160上的第二滑块170固定连接。
另外,移动机构300具有GPS导航功能以自动行使至指定的位置。
以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
- 盖带送料装置及具有该盖带送料装置的载带封装设备
- 送料装置及应用送料装置的热封生产线