双基地合成孔径雷达盲定位方法
文献发布时间:2023-06-19 12:08:44
技术领域
本发明属于雷达盲定位技术领域,具体涉及双基合成孔径雷达在航姿信息误差较大或者缺失情况下多强点联合目标定位方法。
背景技术
双基合成孔径雷达(SAR,Synthetic Aperture Radar)由于收发平台分置,与单基SAR相比:获取目标能力更强;探测距离更远;观测场景更加灵活以及保密性抗干扰能力更强等等。而定位作为SAR中至关重要的环节之一,结合双基SAR的种种优势,对双基SAR目标定位的研究探索具有相当可观的实用价值。
SAR在对地观测过程中,目标定位算法可以依赖于一些静态特征地标,然后对SAR图像进行调整,以实现目标定位;SAR体制中常见的定位模型是距离-多普勒(RD)定位模型,是由JOHN C.CURLANDER在20世纪80年代早期提出的,主要思想是构建目标-载机平台距离方程,多普勒方程以及地球模型,目标的位置由上述方程联立求解;随后有在RD定位模型基础上引入的DEM数据信息,使得RD定位方法的精度得以进一步提高;以及使用在导弹制导系统上的景象匹配方法也是在RD定位方法的基础上延拓的。上述提及的这些定位方法都过分依赖于航姿信息,而惯导系统在长时间飞行过程中累计误差也较大,因此难以满足高精度定位系统;而受限于定位方法,一旦缺失航姿信息,上述定位方法不能够实现定位。
发明内容
针对背景技术存在的上述问题,本发明提出了一种双基地合成孔径雷达盲定位方法。
本发明的技术方案是:一种双基地合成孔径雷达盲定位方法,具体包括如下步骤:
S1.建立双基SAR目标定位模型,并完成模型参数初始化;
在直角坐标系下,场景中心点坐标为O点(X
S2.获取SAR的点目标回波,假设发射站发射信号是线性调频信号(LFM),则接收站从点目标P(x,y)接收到的回波信号解调后为:
其中,rect
S3.对回波信号S(η,τ;x,y)进行距离徙动校正;
S4.从完成距离徙动校正后的回波信号S
S5.根据目标点双基距离和、方位零时刻多普勒频率、多普勒调频率建立定位方程并进行求解,得到目标点的实际位置坐标。
进一步的,步骤S3的具体分步骤如下:
S31.对回波信号S(η,τ;x,y)进行距离向傅里叶变换,得到距离频域-方位时域回波信号S
S32.对距离频域-方位时域回波信号S
S33.对脉压后回波信号S
其中,η
S34.对去除一阶距离走动后的信号相位
S35.对去除高阶距离徙动的回波信号进行距离向逆傅里叶变换,得到距离时域-方位时域的回波信号S
进一步的,步骤S5的具体分步骤如下:
S51.使用时频估计方法从回波中估计得到目标的波束中心时刻η
S52.根据S51中计算的目标点方位向距离Δy,结合方位零时刻双基距离和R(0;x,y),计算目标点相对于场景中心点O的x方向坐标差Δx,即Δx=F[R(0;x,y),Δy],其中,F表示(Δx,Δy)与R(0;x,y)之间的非线性映射关系;
S53.结合S52和S51中求解的目标点相对于场景中心点O的坐标差Δx、Δy,建立定位方程:
其中,|·|表示向量求模运算,
且场景内任一目标点坐标(x,y)可以使用场景中心点(Xo,Yo)表示:
其中,R
S54.采用差分进化算法求解上述定位方程,得到未知参量的最优解
本发明的有益效果:本发明采用多强点联合以及构建地距网格进行匹配的思想,首先在回波域进行距离向脉冲压缩,使用一阶Keystone变换去除一阶距离走动,构造高阶距离徙动补偿因子进行高阶距离徙动校正,使相同点目标的能量集中在同一个距离门内;然后使用分数阶傅里叶变换估计强点目标的多普勒参数;最后建立定位方程,计算估计目标点理论多普勒参数,根据最小二乘准则进行约束,多次迭代获得收敛解,求解场景中心点的位置,再根据定位目标与场景中心点的相对位置关系确定目标的位置。相比于传统的SAR定位方法,本发明的方法不依赖于载机平台的航姿信息,有效解决了实际飞行过程中惯导系统航姿信息误差较大下定位不准及航姿信息缺失情况下定位精度不高或者不能定位的问题。
附图说明
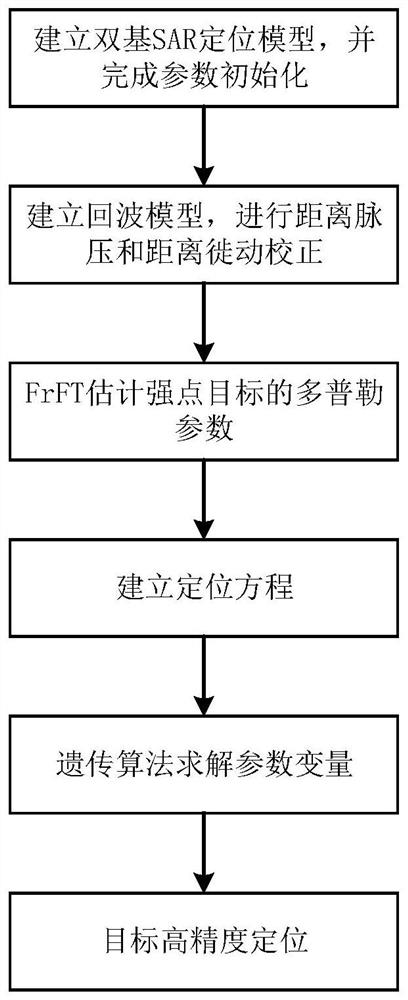
图1是本发明提供的一种双基SAR目标盲定位的流程框图。
图2是本发明具体实时例采用的双基SAR几何结构图。
图3是本发明具体实施例采用的定位目标点。
图4是经过S4步骤后无距离徙动的二维时域回波信号图。
图5是S5步骤估计强点目标的多普勒参数图。
图6是经过S6步骤各参数变量的迭代求解曲线图。
具体实施方式
本发明双基SAR盲定位的流程示意图如图1所示,主要包含五个部分,依次为:A.建立双基SAR定位模型并进行参数初始化;B.对回波信号进行距离脉压,一阶Keystone变换以及高阶距离徙动校正;C.FrFT估计回波中强点目标的多普勒参数;D.联合多强点双基距离和,多普勒信息建立定位方程;E.采用差分进化算法求解定位方程,并获得目标的位置信息。
本发明主要采用仿真实验的方式进行验证,仿真验证平台为MatLab2020b,所有步骤、结论都验证正确。下面结合附图和具体实施方式对本发明作进一步的详细描述。
A.建立双基SAR定位模型,并完成参数初始化;
本发明具体实例采用的双基SAR几何结构如图2所示,所采用的系统参数表如表1所示:
表1
其中,发射站,接收站在方位0时刻的位置坐标分别为(8000,-2000,4000),(-500,-4000,3000);载机沿与Y轴平行方向平飞,速度分别为100m/s和120m/s;发射信号是中心频率f
B.对回波信号进行距离徙动校正,具体步骤如下:
B1.获取点目标回波。仿真中设置的点目标如图3所示,发射信号是线性调频信号(LFM),则接收站从点目标P(x,y)接收到的回波信号解调后为:
其中,rect
B2.对回波信号作距离向傅里叶变换,得到方位时域-距离频域信号:
B3.通过
B4.对R(η;x,y)进行泰勒展开,并保留至三阶项,有:
其中,R(0;x,y)是方位0时刻双基距离,A',B',C'是泰勒一阶、二阶、三阶展开系数。
B5.进行一阶Keystone变换,去除一阶距离走动,变换关系如下:
其中,η
B6.构造高阶距离徙动补偿因子,进行高阶距离徙动校正,补偿因子相位为:
B7.将补偿相位因子
C.对信号S
D.根据目标点双基距离和,方位0时刻多普勒频率以及多普勒调频率建立定位方程并进行求解,具体步骤如下:
D1.使用时频估计方法从回波中估计得到目标点的波束中心时刻η
D2.根据D1中计算的目标点方位向距离Δy,结合方位零时刻双基距离和R(0;x,y),计算目标点相对于场景中心点O的x方向坐标差Δx,即Δx=F[R(0;x,y),Δy],其中F表示(Δx,Δy)与R(0;x,y)之间的非线性映射关系,即:
D3.结合S52和S51中求解的目标点相对于场景中心点O的坐标差Δx,Δy建立定位方程:
其中,上述表达中加粗符号指代向量,符号|·|表示求模,
且场景内任一目标点坐标(x,y)可以使用场景中心点(Xo,Yo)表示:
R
上述定位方程中存在8个未知变量,表示为θ,单凭一个强点目标的距离和多普勒参数信息,上述方程为欠定方程,存在无穷解。表面上每当增加一个目标点(x
E.采用差分进化算法求解D3中定位方程。
定位方程中存在
根据目标点和场景中心点(X
其中,迭代求解过程如图6所示,最终参数变量都收敛在最优解,定位结果如表2所示。
表2
通过本发明具体实施方式可以看出,本发明解决了实际飞行过程中航姿信息误差较大或者航姿信息完全缺失情况下目标定位误差较大的问题,从而实现双基SAR盲定位。
- 双基地合成孔径雷达盲定位方法
- 双基地合成孔径雷达运动目标定位方法