一种基于中医足部反射疗法的康养机器人
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及足部诊疗设备,特别涉及一种基于中医足部反射疗法的康养机器人。
背景技术
根据足部全息医学理论,足部是人体重要的信息元,通过足部反射区按摩调理,能够有效改善人体心身机能状态、代谢状态、内分泌与免疫功能状态、促进血液循环与微循环,进而改变人体血液、神经体液与尿液等多项生理生化指标。因此,足部诊疗具有较高的机体功能调理和病症治疗效率,且无任何副作用。
目前,已采用足疗机进行足部诊疗,现有的足疗机在按摩机构方面,脚底统一采用滚轮或曲柄滑块,脚背部采用气带或夹紧板,设备只能实现反射区统一、模糊的按摩,不能实现反射区的单独刺激、专家的配穴方案以及按摩力的柔顺控制,用户体验不佳。
发明内容
针对上述问题,本发明的目的在于提供一种基于中医足部反射疗法的康养机器人,将机器人技术与中医足部全息医学及反射疗法相结合,能够实现足部穴位的准确定位,模拟中医足部反射区按摩手法对相关反射区进行按摩刺激,结合中医配穴方案和疗程,能够提供规范的足部健康调理服务,达到机体功能调理以及治未病的功能,推动足部中医反射疗法的发展和推广。
为了实现上述目的,本发明采用以下技术方案:
一种基于中医足部反射疗法的康养机器人,包括底座及设置于所述底座上的一个或两个足部按摩机构;所述足部按摩机构包括脚趾滚轮按摩机构、脚跟滚轮按摩机构、脚码调整机构及脚底按摩棒机构,其中脚码调整机构和脚跟滚轮按摩机构分别设置于所述底座的前、后端,所述脚码调整机构具有沿靠近或远离所述脚跟滚轮按摩机构的方向移动的自由度;所述脚趾滚轮按摩机构设置于所述脚码调整机构上,所述脚趾滚轮按摩机构和所述脚跟滚轮按摩机构均具有旋转自由度;所述脚底按摩棒机构设置于脚趾滚轮按摩机构和脚跟滚轮按摩机构之间,具有X、Y、Z方向的自由度。
所述脚底按摩棒机构包括二维移动机构及设置于所述二维移动机构上的左按摩棒机构和右按摩棒机构,所述二维移动机构可驱动所述左按摩棒机构和右按摩棒机构沿前后方向同步运动及驱动左按摩棒机构和右按摩棒机构相互靠近或远离;所述左按摩棒机构和右按摩棒机构可沿Z向进行伸缩。
所述左按摩棒机构和所述右按摩棒机构结构相同,均包括支座、升降驱动机构及按摩棒,其中支座设置于所述二维移动机构上,所述升降驱动机构设置于所述支座上且输出端与按摩棒连接,所述按摩棒沿竖直方向设置且与所述支座滑动连接,所述按摩棒头部为锥面结构。
所述升降驱动机构包括升降丝母、升降丝杠及升降丝杠旋转驱动电机,其中升降丝杠沿竖直方向设置于所述支座上,且可转动,所述升降丝杠旋转驱动电机与升降丝杠连接,用于驱动升降丝杠转动;所述升降丝母与所述升降丝杠形成螺纹副,所述升降丝母与所述按摩棒连接。
所述二维移动机构包括X向直线驱动机构和Y向直线驱动机构;
所述X向直线驱动机构包括纵向滑板、纵向丝杠、纵向丝母、纵向丝杠旋转驱动电机、纵向滑块及纵向导轨,其中纵向丝杠和纵向导轨均沿X方向设置于所述底座上,且纵向丝杠可转动;所述纵向丝杠旋转驱动电机与纵向丝杠301连接,用于驱动纵向丝杠301旋转;所述纵向丝母与所述纵向丝杠形成螺纹副;所述纵向滑板的一端与所述纵向丝母连接,另一端通过纵向滑块与纵向导轨滑动连接;
所述Y向直线驱动机构包括横向丝杠旋转驱动电机、横向丝杠及两个横向丝母,其中横向丝杠沿Y向设置于所述纵向滑板上,且可转动;所述横向丝杠旋转驱动电机设置于所述纵向滑板上,且输出端与横向丝杠303连接,用于驱动横向丝杠303转动;所述横向丝杠具有两段方向螺纹,两个横向丝母分别与两段反向螺纹形成螺纹副;两个横向丝母分别与所述左按摩棒机构和所述右按摩棒机构连接。
所述脚码调整机构包括脚码调整支架及伸缩驱动机构,其中脚码调整支架可沿X方向滑动地设置于所述底座上,所述脚趾滚轮按摩机构设置于脚码调整支架上;
所述伸缩驱动机构包括脚码调整丝杠驱动电机、脚码调整丝杠及脚码调整丝母,其中脚码调整丝杠沿X向设置于所述底座上,且可转动;所述脚码调整丝杠驱动电机的输出端与所述脚码调整丝杠连接,用于驱动脚码调整丝杠转动;所述脚码调整丝母与脚码调整丝杠形成螺纹副;所述脚码调整丝母与所述脚码调整支架连接。
所述脚趾滚轮按摩机构包括脚趾按摩滚轮及旋转驱动机构Ⅰ,所述脚趾按摩滚轮沿Y向设置于所述脚码调整机构上,且可转动;所述旋转驱动机构Ⅰ与脚趾按摩滚轮连接,用于驱动所述脚趾按摩滚轮转动;
所述脚跟滚轮按摩机构包括旋转驱动机构Ⅱ和脚跟按摩滚轮,其中脚跟按摩滚轮沿Y向设置于所述底座上且可转动;所述旋转驱动机构Ⅱ设置于所述底座上且输出端与所述脚跟按摩滚轮连接,用于驱动脚跟按摩滚轮转动。
所述底座上设有位于所述脚跟滚轮按摩机构后侧的脚部限位槽。
所述的基于中医足部反射疗法的康养机器人还包括设置于所述底座上的脚背气垫和脚跟气垫,所述脚跟气垫位于脚背气垫的后侧;所述脚背气垫和所述脚跟气垫的内侧壁上设有多个按摩凸起。
所述的基于中医足部反射疗法的康养机器人还包括罩设于所述底座上的外壳,所述外壳上设有两个脚部插入槽和显示屏,两个脚部插入槽分别与两个足部按摩机构相对应。
本发明的优点及有益效果是:
本发明能够模拟中医足部反射按摩手法,实现对脚底反射区的精准定位和按摩力的柔顺控制,结合中医配穴方案和疗程,实现人体机能的调理以及治未病功效。
本发明能够利用按摩棒机构,对反射区实现大范围的刮压,力度多档可调,满足反射区按摩刺激要求。
本发明能够实现不同大小脚码的适应性。通过脚码的输入,机器人自动调整反射区的位置,并驱动按摩棒对反射区进行刮压或顶压按摩。
本发明设有脚背和脚跟气带按摩装置,气带设有凸点,通过规律性的充放气作业,实现对脚背部特定反射区的顶压按摩。
本发明能够通过无线网络连接中医足部反射疗法专家远端,下载并安装新的调理功能程序,从而实现按摩功能的拓展。
附图说明
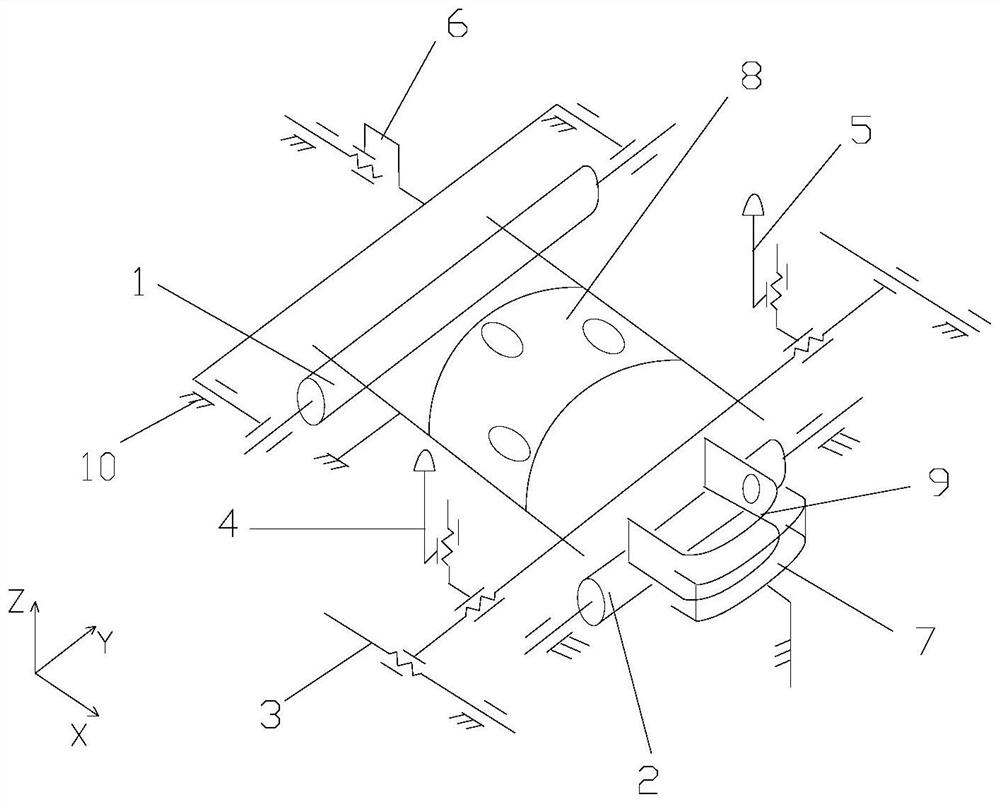
图1为本发明一种基于中医足部反射疗法的康养机器人的结构示意图之一;
图2为本发明一种基于中医足部反射疗法的康养机器人的结构示意图之二;
图3为本发明中外壳的结构示意图;
图4为本发明中机器人手持控制器界面示意图。
图中:1为脚趾滚轮按摩机构,101为脚趾按摩滚轮,2为脚跟滚轮按摩机构,201为脚跟按摩滚轮,3为二维移动机构,301为纵向丝杠,302为纵向丝母,303为横向丝杠,304为横向丝母,305为纵向滑块,306为纵向导轨,4为左按摩棒机构,5为右按摩棒机构,501为支座,502为升降丝母,503为升降丝杠,504为按摩棒,6为脚码调整机构,601为脚码调整支架,602为脚码调整丝杠,603为脚码调整丝母,7为脚部限位槽,8为脚背气垫,9为脚跟气垫,10为底座,11为外壳,12为脚部插入槽,13为显示屏。
具体实施方式
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
如图1所示,本发明提供的一种基于中医足部反射疗法的康养机器人,包括底座10及设置于底座10上的一个或两个足部按摩机构;足部按摩机构包括脚趾滚轮按摩机构1、脚跟滚轮按摩机构2、脚码调整机构6及脚底按摩棒机构,其中脚码调整机构6和脚跟滚轮按摩机构2分别设置于底座10的前、后端,脚码调整机构6具有沿靠近或远离脚跟滚轮按摩机构2的方向移动的自由度;脚趾滚轮按摩机构1设置于脚码调整机构6上,脚趾滚轮按摩机构1和脚跟滚轮按摩机构2均具有旋转自由度;脚底按摩棒机构设置于脚趾滚轮按摩机构1和脚跟滚轮按摩机构2之间,具有X、Y、Z方向的自由度。
本发明的实施例中,脚底按摩棒机构包括二维移动机构3及设置于二维移动机构3上的左按摩棒机构4和右按摩棒机构5,二维移动机构3可驱动左按摩棒机构4和右按摩棒机构5沿前后方向同步运动及驱动左按摩棒机构4和右按摩棒机构5相互靠近或远离;左按摩棒机构4和右按摩棒机构5可沿Z向进行伸缩。
如图2所示,本发明的实施例中,左按摩棒机构4和右按摩棒机构5结构相同,均包括支座501、升降驱动机构及按摩棒504,其中支座501设置于二维移动机构3上,升降驱动机构设置于支座501上且输出端与按摩棒504连接,按摩棒504沿竖直方向设置且与支座501上的升降导轨滑动连接。具体地,按摩棒504头部为锥面结构。
具体地,升降驱动机构包括升降丝母502、升降丝杠503及升降丝杠旋转驱动电机,其中升降丝杠503沿竖直方向设置于支座501上,且可转动;升降丝杠旋转驱动电机与升降丝杠503连接,用于驱动升降丝杠503旋转;升降丝母502与升降丝杠503形成螺纹副,升降丝母502与按摩棒504连接。升降丝杠旋转驱动电机驱动升降丝杠503转动,升降丝母502带动按摩棒504沿升降导轨上下运动。
如图2所示,本发明的实施例中,二维移动机构3包括X向直线驱动机构和Y向直线驱动机构;X向直线驱动机构包括纵向滑板、纵向丝杠301、纵向丝母302、纵向丝杠旋转驱动电机、纵向滑块305及纵向导轨306,其中纵向丝杠301和纵向导轨306均沿X方向设置于底座10上,且纵向丝杠301可转动;纵向丝杠旋转驱动电机与纵向丝杠301连接,用于驱动纵向丝杠301旋转;纵向丝母302与纵向丝杠301形成螺纹副;纵向滑板的一端与纵向丝母302连接,另一端通过纵向滑块305与纵向导轨306滑动连接。纵向丝杠旋转驱动电机驱动纵向丝杠301转动,纵向丝母302带动纵向滑板沿纵向导轨306滑动,从而调整前后方向的位置。
本实施例中,Y向直线驱动机构包括横向丝杠旋转驱动电机、横向丝杠303及两个横向丝母304,其中横向丝杠303沿Y向设置于纵向滑板上,且可转动;横向丝杠旋转驱动电机设置于纵向滑板上,且输出端与横向丝杠303连接,用于驱动横向丝杠303转动。横向丝杠303具有两段方向螺纹,两个横向丝母304分别与两段反向螺纹形成螺纹副;两个横向丝母304分别与左按摩棒机构4和右按摩棒机构5连接。横向丝杠旋转驱动电机驱动横向丝杠303转动,两个横向丝母304带动左按摩棒机构4和右按摩棒机构5相互靠近或远离,从而调整左按摩棒机构4和右按摩棒机构5之间的间距。二维移动机构3实现按摩棒机构在脚底平面的移动。
如图2所示,本发明的实施例中,脚码调整机构6包括脚码调整支架601及伸缩驱动机构,其中脚码调整支架601可沿X方向滑动地设置于底座10上,伸缩驱动机构设置于底座10上,且输出端与脚码调整支架601连接,脚趾滚轮按摩机构1设置于脚码调整支架601上。
本实施例中,伸缩驱动机构包括脚码调整丝杠驱动电机、脚码调整丝杠602及脚码调整丝母603,其中脚码调整丝杠602沿X向设置于底座10上,且可转动;脚码调整丝杠驱动电机的输出端与脚码调整丝杠602连接,用于驱动脚码调整丝杠602转动;脚码调整丝母603与脚码调整丝杠602形成螺纹副;脚码调整丝母603与脚码调整支架601连接。脚码调整丝杠驱动电机驱动脚码调整丝杠602转动,脚码调整丝母603带动脚码调整支架601沿X向运动,以适应不同脚码足部反射区按摩。
本实施例中,脚趾滚轮按摩机构1包括脚趾按摩滚轮101及旋转驱动机构Ⅰ,脚趾按摩滚轮101沿Y向(左右方向)设置,且可转动;旋转驱动机构Ⅰ与脚趾按摩滚轮101连接,用于驱动脚趾按摩滚轮101转动。
本实施例中,脚跟滚轮按摩机构2包括旋转驱动机构Ⅱ和脚跟按摩滚轮201,其中脚跟按摩滚轮201沿Y向(左右方向)设置于底座10上,且可转动;旋转驱动机构Ⅱ设置于底座10上,且输出端与脚跟按摩滚轮201连接,用于驱动脚跟按摩滚轮201转动。具体地,旋转驱动机构Ⅰ和旋转驱动机构Ⅱ采用伺服电机。
进一步地,底座10上设有位于脚跟滚轮按摩机构2后侧的脚部限位槽7,以便限制脚部沿前后方向的位置。
本实施例中,脚趾滚轮按摩机构1和脚跟滚轮按摩机构2各采用一套驱动机构,已实现两处滚轮的独立控制。脚码调整机构6可采用手动或电驱动的方式,即手动或电动方式驱动丝杠旋转,推动丝母沿脚长度方向移动,丝母连接脚趾滚轮按摩机构1,从而在机构上实现脚码尺寸的适应性。
在上述实施例的基础上,如图1-2所示,本发明提供的基于中医足部反射疗法的康养机器人,还包括设置于底座10上的脚背气垫8和脚跟气垫9,脚跟气垫9位于脚背气垫8的后侧;脚背气垫8和脚跟气垫9通过充气实现按摩功能。进一步地,脚背气垫8和脚跟气垫9的内侧壁上设有多个按摩凸起。
如图3所示,本发明的实施例中,基于中医足部反射疗法的康养机器人还包括罩设于底座10上的外壳11,外壳11上设有两个脚部插入槽12和显示屏13,两个脚部插入槽12分别与两个足部按摩机构相对应。
本发明依据中医足部反射疗法确定的脚底主要反射区的位置和范围及相应的配穴和按摩手法,结合机器人末端按摩棒机构精准定位和力位控制技术,实现机器人化的作业工具(按摩棒、滚轮、气带)对脚部反射区进行规律性按摩,达到机体功能调理以及治未病的功能。
在上述实施例的基础上,本发明提供的一种基于中医足部反射疗法的康养机器人还包括机器人本体控制器和手持控制器,机器人本体控制器具有机器人的感知和控制功能;为实现控制系统的功能,该机器人本体控制器包括主控单元、存储单元、驱动单元、传感单元、通讯单元、电源模块。其中主控单元实现程序的运算、控制指令的下达以及与手持控制器的信息交互。驱动单元为电机等的驱动元件。通讯单元用于实现与手持控制器的通讯,电源模块用于实现机器人各部分的供电。传感单元用于感知机器人的状态和压力传感器信息。
如图4所示,手持控制器为机器人操作界面,具有输入脚码、设定按摩模式、按摩力度以及开始、暂停、停止功能。为实现手持控制器的功能,该操控界面的设计主要包括:调理功能选择模块、配穴设定模块、脚码输入模块、按摩操控模块、远程连接模块。调理功能选择模块是在操控界面上预设多个调理功能选择项,操作者可以根据需要选择不同的调理功能作为本次按摩的任务。调理功能一旦选定,机器人将按照固定的配穴方案、周期和疗程进行按摩;配穴设定模块是指在操控界面上选定本次调理方案所需的反射区、按摩次序,以及每个反射区按摩周期、按摩强度等,一经设定确认,该配穴方案将作为当前的按摩程序予以保留和执行;脚码输入模块用于对当前任务设定脚码,以使得反射区的位置符合当前脚码的要求;按摩操控模块主要包括开始、暂停、停止以及按摩压力、滚轮速度等调整按键;远程连接模块为远程连接启动程序,实现机器人用户终端与远端通讯,下载并安装新的调理功能程序,实现机器人按摩功能的拓展。
该康养机器人通过手持控制器设定配穴按摩方案或选择专家预设的调理功能模块,机器人本体控制器依据输入的脚码,规划机器人末端按摩棒机构、脚跟滚轮、脚趾滚轮以及脚背部气带动作,其中按摩棒机构能够依靠二维移动和竖直进给实现对脚掌和脚心范围内反射区的精准到位,并基于力反馈实现按摩棒的力位控制,即在按摩棒走位的同时,按摩棒对反射区进行施力刮压或顶压,以模拟中医反射专家的按摩手法,对脚部反射区进行依次的按摩刺激,实现人体机能调理、治未病的功效。
为实现对脚部反射区的按摩刺激,需要对脚和脚部反射区进行数字化。利用激光扫描仪扫描特定脚码,得到脚的三维数字模型,再由中医反射疗法专家在脚的数字三维模型上,标识反射区的序号、位置和大小,由此实现该脚码反射区的数字化,依据同样方法实现脚码系列的反射区数字化,反射区的数字信息将作为机器人的按摩输入信息,确定反射区的位置和大小。
为实现机器人的按摩调理机体功能的疗效,中医反射疗法专家结合全息医学理论和机器人采用双脚同时按摩方式的特性,根据不同的调理功能需求,设计机器人专用的按摩方法、配穴方案和疗程,依次实现中医反射疗法与机器人技术的融合。
为实现模拟中医反射疗法专家的手法,机器人首先依靠脚部反射区的数字化模型,利用二维移动机构将脚底按摩棒机构对准反射区位置;然后按摩棒机构驱动按摩棒升起顶压脚底反射区,机器人基于压力反馈信息实现按摩棒驱动电机的力控,使得按摩棒对反射区的压力能够保持设定值;进而与规划二维移动机构的轨迹相结合,实现整个反射区的走位与施力跟随。单个反射区循环按摩次数达到要求后,依次对配穴方案的其它反射区依次按摩。
具体使用时,根据按摩受术者脚码大小调整脚码调整机构6,然后将脚伸入,脚跟落在脚跟滚轮按摩机构2上,脚趾落在脚趾滚轮按摩机构1上。然后在手持控制器操控界面上设定脚码,使之与脚码调整机构6的脚码设置值一致,选择调理功能,启动机器人。机器人按摩棒按配穴方案设定的按摩次序和按摩周期在反射区位置往复刮压,配合脚趾滚轮、脚跟滚轮的运动以及脚背气带凸点顶压刺激,开展机器人的机体功能调理作业。基于中医足部反射疗法的康养机器人对脚部四个主要的反射区域进行针对性按摩,四个主要区域分别是脚趾反射区、脚掌及脚心反射区、脚跟反射区和脚背反射区。对脚趾反射区采用模糊、大范围、统一形式的滚轮按摩,在滚轮上设置凸点,依靠滚轮的旋转和凸点的规律性刺激,实现该区域内反射区的按摩;对于脚掌和脚心处的反射区,利用按摩棒进行反射区依次精准按摩;对于脚跟反射区,利用带有凸点的滚轮进行规律性刺激;对于脚背部反射区,利用带有凸点的气带对脚背部、外踝等多个反射区进行规律性刺激。四个区域的按摩机构可相互协同动作,也可依次动作,实现特定的按摩配穴方案。
以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
- 一种基于中医足部反射疗法的康养机器人
- 一种智能康养舱及智能康养系统