一种刹车装置及其医疗器械设备
文献发布时间:2023-06-19 13:30:50
技术领域
本发明涉及医疗器械领域,具体涉及到一种刹车装置及其医疗器械设备。
背景技术
目前,医疗器械设备的移动与驻停大多通过脚轮自带的制动板来实现,在医疗器械设备需要刹车时踩下制动板上锁,移动时用脚尖顶起制动板解锁。由于医疗器械设备一般设置多个脚轮,在上/解锁时需要医护人员操作多次,动作繁琐,效率低,不便使用。
中国专利申请号CN112172410A公布了一种中控刹车装置及中控刹车系统,其技术方案通过踩下踏板带动棘轮机构,棘轮机构再带动齿轮机构传动,齿轮机构再带动摇杆来回摆动,摇杆再带动两个连杆来驱动与两个连杆两端的4个中控脚轮锁定或解锁,该技术方案结构复杂,装配困难,结构不稳定,且该中控刹车装置只适用于带有四个脚轮的医疗器械设备的移动和驻停,且四个脚轮必须是对称分布才方便控制驻停与移动。
因此,有必要开发一种新型的刹车装置,可以更加灵活和方便的移动医疗设备,简化结构设计,降低设计和制造成本。
发明内容
本发明涉及一种刹车装置及磁锚定设备,技术方案如下:
第一方面,本发明提供一种刹车装置,包括基座、踏板、第一传动机构及第二传动机构,所述基座进一步包括中心底座及与环绕中心底座呈环状分布的爪,所述中心底座内置中心轴,踏板设置于第一传动机构上,第一传动机构设置于基座01上,第二传动机构呈环状套接于中心底座的中心轴上,且第二传动机构可绕轴心做往复圆周运动,所述第一传动机构由球头、曲柄、固定座、连杆衬套及连杆组成,所述连杆的两端分别连接中控脚轮与曲柄,所述曲柄的另一端与球头端部固定连接,所述连杆的一端位于曲柄与中控脚轮之间的位置套结一连杆衬套,且连杆衬套与连杆固定连接,所述连杆衬套可在固定座内沿连杆衬套的圆周方向旋转;
所述第二传动机构由传动法兰和中心轴衬套组成,所述中心轴衬套通过紧定螺钉与中心轴固定,所述传动法兰的内孔与中心轴衬套套接,所述传动法兰的上下面分别由中心轴衬套和中心底座限位,所述球头安装在所述传动法兰的导向槽内,且球头可在导向槽内转动并沿着导向槽上下移动。
进一步的,所述中心轴的截面可以是圆形、等边多边形或矩形的任一种。
进一步的,所述踏板的数量小于等于第一传动机构的数量,且踏板最少数量为一个。
进一步的,所述踏板通过连杆连接第二传动机构,所述踏板可绕连杆的轴线方向顺时针或逆时针转动。
进一步的,所述第一传动机构的数量小于等于爪的数量,且最少为两个,所述第一传动机构的数量与爪间隔设置。
进一步的,所述连杆的截面为圆形或多边形的任一种。
进一步的,所述第一传动机构由球头、曲柄、固定座、连杆衬套及连杆组成,所述连杆的截面为圆形或多边形的任一种,连杆的两端分别连接中控脚轮及曲柄,所述曲柄的另一端通过滚动轴承与球头杆连接,从而球头杆可以绕滚动轴承的中心旋转,所述连杆连接曲柄与中控脚轮之间的位置套结一连杆衬套,且连杆衬套与连杆固定连接,所述连杆衬套可在固定座内沿连杆衬套的圆周方向旋转。
第二方面,本发明提供一种医疗器械设备,所述医疗器械设备采用第一方面任一项所述的刹车装置。
采用本发明的刹车装置,可以更加灵活和方便的移动医疗器械设备,简化结构设计,降低设计和制造成本。
附图说明
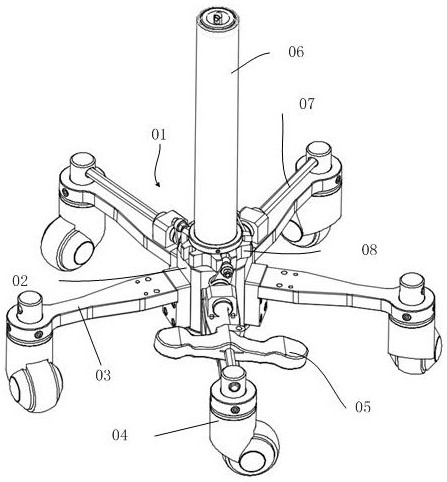
图1:本发明第一实施例的刹车装置结构示意图。
图2:本发明第一实施例的第一传动机构结构示意图。
图3:本发明第一实施例的传动法兰结构示意图。
图4:本发明第一实施例的第二传动机构剖视图。
图5a:本发明第一实施例的刹车装置锁定状态示意图。
图5b:本发明第一实施例的刹车装置解锁状态示意图。
图6:本发明的磁锚定医疗设备示意图。
图7:本发明第二实施例的刹车装置结构示意图。
图8:本发明第二实施例的刹车装置安装示意图。
图9:本发明第三实施例的第三传动机构示意图。
各序号及对应的名称分别为:基座01,中心底座02,爪03,中控脚轮04,踏板05,中心轴06,第一传动机构07,第二传动机构08,球头09,曲柄10,固定座11,连杆衬套12,连杆13,内孔14,传动法兰15,导向槽16,中心轴衬套17,肘关节18,肩关节19,水平悬臂20,重力平衡支撑臂21,立柱22,万向旋转磁头23,解锁踏板24,锁定踏板25,医疗设备主体26,球头杆27,滚动轴承28。
具体实施方式
以下结合附图及实施例,对本发明进行进一步详细说明,应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
请参考图1本发明第一实施例的刹车装置结构示意图,所述刹车装置包括基座01、踏板05、第一传动机构07及第二传动机构08,其中,基座01由中心底座02与环绕中心底座呈环状分布的爪03构成,其中爪03数量为大于等于三个,爪03的末端设置有脚轮安装面,每一爪03的大小、尺寸与中心轴的距离均等;中心轴06固定于中心底座02内,其截面可以是圆形、等边多边形或矩形的任一种,踏板05设置于第一传动机构07上,其数量小于等于第一传动机构07的数量,且最少数量为一个,踏板05的尺寸形状可根据实际需求设计,本发明对此不做限制,所述踏板05可绕连杆13的轴线方向顺时针或逆时针转动一定角度,第一传动机构07设置于基座01上,一端与中控脚轮04连接,另一端与第二传动机构08连接,第一传动机构07的数量小于等于爪03的数量,最少为两个,且第一传动机构07的数量与爪03间隔设置,不同的第一传动机构07的尺寸大小与爪03的尺寸适配,第二传动机构08呈环状套接于中心底座02的中心轴06上,且第二传动机构08可以绕轴心做往复圆周运动。
踏板05可沿顺时针方向或逆时针方向下压动作转动一定角度并带动连接被踩踏踏板的第一传动机构07转动,进而驱动踏板05通过驱动第一传动机构07带动第二传动机构08绕中心轴06旋转一定角度,从而使第二传动机构08带动其它从动第一传动机构07转动一定角度,从而使所有第一传动机构07顺时针旋转或逆时针旋转并驱动中控脚轮04实现解锁或锁定,从而进一步控制医疗器械设备的驻停锁定和移动。
请参考图2本发明第一实施例的第一传动机构结构示意图,第一传动机构07由球头09、曲柄10、固定座11、连杆衬套12及连杆13组成,所述连杆13的截面为圆形或多边形的任一种,连杆13的一端与中控脚轮04连接,另一端通过紧定螺钉与曲柄10的一端固定连接,曲柄10的另一端与球头09端部固定连接,连杆13的一端位于曲柄10与中控脚轮04之间的位置套结一连杆衬套12,且连杆衬套12与连杆13固定连接,连杆衬套12的外圈与固定座11的中空位置相适应,且留存一定间隙,从而使连杆衬套12可以在固定座11内沿连杆衬套12的圆周方向旋转,固定座11通过螺钉与所述爪03固定。
参考图3本发明第一实施例的传动法兰结构示意图及图4本发明第一实施例的第二传动机构剖视图所示,第二传动机构08由传动法兰15和中心轴衬套17组成,中心轴衬套17通过紧定螺钉与中心轴06固定,传动法兰15的内孔14与中心轴衬套17套接,所述传动法兰15的上下面分别被中心轴衬套17和中心底座02限位,从而使传动法兰15可以沿着中心轴06的圆周方向旋转,进一步的所述球头09安装在所述传动法兰15的导向槽16内,且球头09可以在导向槽16内转动并沿着导向槽上下移动。
参考图5a本发明第一实施例的刹车装置锁定状态示意图及图5b本发明第一实施例的刹车装置解锁状态示意图,所述踏板05与连杆13固定连接,当逆时针方向踩下踏板时,踏板05转动一定角度,进而带动第一传动机构07同时转动一定角度,此时与连杆13一端连接的中控脚轮04锁定,此时,由于连杆13的另一端固定有曲柄10,从而曲柄10同步旋转一定角度,从而安装在曲柄10一端的球头09驱动传动法兰15沿着中心轴衬套17的圆周方向顺时针旋转一定角度,传动法兰15旋转一定角度会驱动其它从动第一传动机构07转动一定角度,从而驱动与其它连杆连接的中控脚轮04锁定。
当顺时针方向踩下踏板05时,踏板复位并转动一定角度,带动第一传动机构07同时转动一定的角度,此时与连杆13一端连接的中控脚轮04解锁,此时,连杆13另一端的曲柄10也会旋转一定角度,从而安装在曲柄10一端的球头09驱动传动法兰15沿着中心轴衬套17的圆周方向逆时针旋转一定角度,传动法兰15旋转一定角度会驱动其它从动第一传动机构07转动一定角度,从而驱动与其它连杆连接的中控脚轮04解锁。
参考图6本发明的磁锚定医疗设备示意图,该磁锚定医疗设备包括刹车装置及支撑装置,所述支撑装置包括肘关节18、肩关节19、水平悬臂20、重力平衡支撑臂21、立柱22及万向旋转磁头23,所述立柱22的一端通过中心轴06连接刹车装置,所述立柱的高度可以调节,立柱22的另一端连接肩关节19,所述肩关节19可在水平面任意旋转,水平悬臂20连接肩关节19的末端;肘关节18由两个水平旋转关节构成,用于连接水平悬臂20的末端;重力平衡支撑臂21连接肘关节18的另一端,用于平衡负载重力,并在工作空间内纵向活动,实现挂载情况下零阻尼或微小阻尼浮动;万向旋转磁头23挂载于重力平衡支撑臂21的末端,所述万向旋转磁头23内置外锚定磁体,可沿水平及竖直两个旋转轴任意旋转,所述磁锚定医疗设备可操控外锚定磁体在工作空间内任意点运动和驻停,体积小巧、操作轻松不易疲劳,采用本发明的刹车装置可以轻易的控制改磁锚定医疗设备的移动和驻停,有关支撑装置的具体工作原理的描述请参考申请人的在先专利申请号CN 202111058456X,本申请在此不再赘述。
本发明的刹车装置通过踏板与传动机构的配合,驱动中控脚轮锁定或解锁,有效解决了目前每个脚轮通过单独锁定与解锁导致的操作复杂问题,通过一次踩踏操作即可实现多个中控脚轮的锁定或解锁,提高操作效率,便于使用。
参考图7本发明第二实施例的刹车装置结构示意图及图8本发明第二实施例的刹车装置安装示意图,本发明第二实施例的刹车装置适用于四个脚轮的医疗设备主体26,且四个脚轮采用四角对称分布,当逆时针踩下锁定踏板25时,锁定踏板25逆时针转动,带动第一传动机构07驱动其一端的中控脚轮04锁定,同时带动第二传动机构08旋转一定角度,从而带动其它第一传动机构转动一定角度,从而驱动其它三个中控脚轮锁定,此时,刹车装置处于锁定状态,医疗设备主体26被固定。
当需要移动医疗设备主体26时,顺时针踩下解锁踏板24,解锁踏板24顺时针转动,带动第一传动机构07驱动其一端的中控脚轮解锁,同时带动第二传动机构08旋转一定角度,从而带动其它第一传动机构转动一定角度,从而驱动其它三个中控脚轮解锁,此时,刹车装置处于解锁状态,医疗设备主体26可以自由移动。
本发明的刹车装置及其磁锚定设备在锁定时,逆时针方向踩下锁定踏板25,第一传动机构驱动其一端的中控脚轮锁定,同时带动第二传动机构旋转一定角度,从而带动其它从动第一传动机构转动一定角度,从而驱动中控脚轮锁定,此时,刹车装置被固定,可以保证可移动医疗设备锁定。需要解锁时,顺时针方向踩下解锁踏板24,踏板复位带动第一传动机构驱动其一端的中控脚轮解锁,同时带动第二传动机构旋转一定角度,从而带动其它从动第一传动机构转动一定角度,从而驱动中控脚轮解锁。
参考图9本发明第三实施例的第一传动机构示意图,所述第一传动机构07包括球头09、曲柄10、固定座11、连杆衬套12及连杆13,所述连杆13的截面为圆形或多边形的任一种,连杆13的一端与中控脚轮04连接,另一端通过紧定螺钉与曲柄10的一端固定连接,曲柄10的另一端通过滚动轴承28与球头杆27连接,从而球头杆27可以绕滚动轴承28的中心旋转,连杆13的一端位于曲柄10与中控脚轮04之间的位置套结一连杆衬套12,且连杆衬套12与连杆13固定连接,连杆衬套12的外圈与固定座11的中空位置预留一定间隙,从而使连杆衬套12可在固定座11内沿连杆衬套12的圆周方向旋转,固定座11通过螺钉与所述爪03固定。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种刹车装置及其医疗器械设备
- 一种医疗器械设备精密轴类零件内孔冲压加工装置