一种矿井钢丝绳尘垢清除机器人及工作方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及一种尘垢清除机器人及工作方法,尤其适用于矿井下提升机上使用的一种矿井钢丝绳尘垢清除机器人及工作方法。
背景技术
钢丝绳在矿山、冶金、港口、旅游、建筑、铁路等行业中被广泛应用,在各行业中处于非常重要的地位。由于钢丝绳一般处于潮湿、阴暗、脏污等非常恶劣的环境,使用过程中其表面易产生油污、粉尘、锈渍、积渣形成尘垢。
矿井钢丝绳长度较长,且钢丝绳所处环境恶劣,尘垢的清除带来不便,传统的钢丝绳尘垢清除效率低,其效果难以保证。尘垢长时间的累计,导致钢丝绳出现锈蚀等损伤,钢丝绳的寿命降低,使用过程中安全性也无法保证。钢丝绳在无损检测时,由于污垢的存在,影响钢丝绳检测结果,钢丝绳评估受到极大的影响。因此钢丝绳尘垢清除始终是一大难点,也成为矿井安全的重大隐患,造成经济损失巨大。
发明内容
发明目的:针对现有技术中存在的不足,本发明提供一种矿井钢丝绳尘垢清除机器人及其使用方法,满足在钢丝绳上灵活攀爬的要求,可实现高效安全的钢丝绳尘垢清除清洁作业。
技术方案:为实现上述目的,本发明的一种矿井钢丝绳尘垢清除机器人,它包括抱紧装置、升降装置、驱动装置及尘垢清除装置;其中抱紧装置包括上抱紧装置和下抱紧装置,其中上抱紧装置设有用以夹住矿井钢丝绳的上夹持,下抱紧装置设有用以夹住矿井钢丝绳的下夹持,升降装置设置在上抱紧装置和下抱紧装置之间,通过调节升降装置从而改变上抱紧装置和下抱紧装置之间的距离以避免机器人在驱动装置驱动攀爬时产生晃动,尘垢清除装置设置在上夹持与下夹持的拱字形壁内表面上与钢丝绳表面接触,尘垢清除装置配合驱动装置在钢丝绳上行走实现尘垢清除。
所述下抱紧装置包括下抱紧平台、下锥齿轮A、下锥齿轮B、下抱紧电机、下连杆A、下夹持和下连杆B、下套筒;下连杆B为T字型结构,其中下抱紧电机通过支架设置在下抱紧平台上,下抱紧平台一侧设有指向钢丝绳的轨道,下套筒和下连杆A之间螺纹伸缩连接,锥齿轮B设置在下套筒尾端,下抱紧电机的输出轴与下锥齿轮A啮合,通过下锥齿轮A驱动锥齿轮B旋转从而使下连杆A在下套筒内伸缩,下连杆A端部和有双叉结构,双叉结构分别设有两根下连杆B,两根下连杆B分的端部别限制在轨道中,两根下连杆B的端部设有下夹持,所述下夹持包括相互连接的耳廓型连杆臂和拱字形壁,驱动装置及尘垢清除装置均设置在拱字形壁内表面上,耳廓型连杆臂与连根下连杆B铰接,下连杆B与下抱紧平台铰接,下连杆A在下套筒内进行伸缩从而带动下连杆B的转动;下连杆B()带动耳廓型连杆臂进行转动,耳廓型连杆臂和拱字形壁相互连接,通过拱字形壁使驱动装置与矿井钢丝绳接触并抱紧。
上抱紧装置与下抱紧装置结构相同并对称式设置,为机器人提供足够的夹紧力,便于适应不同直径的钢丝绳,提高机器人在攀爬过程中的平稳性;上连杆B为T字型结构,其中上抱紧电机通过支架设置在上抱紧平台上,上抱紧平台一侧设有指向钢丝绳的轨道,上套筒和上连杆A之间螺纹伸缩连接,锥齿轮B设置在上套筒尾端,上抱紧电机的输出轴与上锥齿轮A啮合,通过上锥齿轮A驱动锥齿轮B旋转从而使上连杆A在上套筒内伸缩,上连杆A端部和有双叉结构,双叉结构分别设有两根上连杆B,两根上连杆B分的端部别限制在轨道中,两根上连杆B的端部分别设有上夹持,所述上夹持包括相互连接的耳廓型连杆臂和拱字形壁,驱动装置及尘垢清除装置均设置在拱字形壁内表面上,耳廓型连杆臂与连根上连杆B铰接,上连杆B与上抱紧平台铰接,上连杆B在上套筒内进行伸缩从而带动上连杆B的转动;上连杆B带动耳廓型连杆臂进行转动,从而使拱字形壁跟随转动产生角度变化,通过拱字形壁转动从而使驱动装置与矿井钢丝绳接触并抱紧。
所述升降装置包括左右对称设置的伸缩机构,伸缩机构顶底端分别与上抱紧平台和下抱紧平台连接,在下抱紧平台上还设有驱动伸缩机构的同步驱动装置,所述伸缩机构包括剪刀结构的伸缩架,伸缩架与上抱紧平台之间设有上支撑架,与下抱紧平台支架内设有下支撑架,其中下支撑架上还设有伸缩杆,两根对称设置的伸缩杆外表面设有螺纹,两个伸缩杆外表面螺纹旋向相反,保证两伸缩杆的同方向性,两个伸缩杆下端部分别设有左锥齿轮A和右锥齿轮A;所述同步驱动装置包括升降电机,升降电机的输出轴两侧分别设有右传动轴和左传动轴,右传动轴两端分别设有右锥齿轮C和右锥齿轮B,左传动轴两端分别设有左锥齿轮C和左锥齿轮B,其中升降电机的输出轴通过锥齿轮同时啮合右传动轴的右锥齿轮C以及左传动轴的左锥齿轮C,左锥齿轮A和右锥齿轮A分别与左锥齿轮B和右锥齿轮B啮合;
机器人抱紧钢丝绳时;上抱紧装置中上夹持处于非夹紧钢丝绳状态,下夹持处于夹紧钢丝绳状态;通过升降电机的转动带动锥齿轮转动,右锥齿轮C和左锥齿轮C与锥齿轮相互啮合,锥齿轮转动,带动右锥齿轮C和左锥齿轮C的转动,从而左传动轴和右传动轴转动,左传动轴和右传动轴的转动,通过带动左锥齿轮A和右锥齿轮A转动使两个伸缩杆螺纹转动,伸缩架与伸缩杆铰接,其铰接处可沿下支撑架内表面滑动,从而使伸缩架上下升降,伸缩杆与伸缩架的相互配合,根据机器人运行速度和不同种类的钢丝绳以及应用工况的不同,适当调节上夹持和下夹持之间的距离,减小机器人攀爬时产生的径向晃动幅度,增加攀爬的稳定性,然后上抱紧装置中上夹持夹紧矿用钢丝绳;上夹持和下夹持中的拱字形壁采用强度和刚度较好的材质,防止机器人抱紧时在力的作用下发生变形,使机器人重心与矿用钢丝绳轴线基本重合;控制上夹持和下夹持从打开状态变为闭合状态,使得机器人被安置在钢丝绳上;
所述驱动装置包括设置在上夹持端部拱字形壁的上驱动装置,以及设置在下夹持端部拱字形壁的下驱动装置,上驱动装置和下驱动装置均包括驱动轮、直流减速电机、弹簧、驱动轮支撑架;驱动轮支撑架分别设置在上夹持和下夹持的拱字形壁内侧,支撑架通过转轴连接有用以在钢丝绳上行走的驱动轮,驱动轮支撑架与拱字形壁之间通过两个弹簧连接,使驱动轮支撑架可前后伸缩,以实现不同直径钢丝绳的匹配,弹簧用于产生夹紧力,使机器人抱紧在钢丝绳上,矿井钢丝绳尘垢清除机器人在钢丝绳攀爬遇到障碍时,通过弹簧实现越障功能;驱动轮外表面采用橡胶材质,并纹理处理,直流减速电机设置在驱动轮支撑架侧,并通过输出轴直连驱动轮,所有直流减速电机同时运转,实现机器人攀爬钢丝绳。通过上下抱紧装置产生足够的夹紧力,机器人抱紧在钢丝绳上;然后控制直流减速电机,驱动滚轮转动,使上下驱动装置的驱动轮同步转动,实现机器人高效攀爬钢丝绳。
所述尘垢清除装置包括通过拱字形壁设置在上驱动装置两侧的上尘垢清除装置,以及通过拱字形壁设置在下驱动装置两侧的下尘垢清除装置,两个拱字形壁相互配合,从而使上驱动装置和上尘垢清除装置、下驱动装置和下尘垢清除装置将钢丝绳包裹夹持。
所述上尘垢清除装置和下尘垢清除装置结构相同,尘垢清除装置包括尘垢清除辅助轮、尘垢清除铜刷和齿轮箱体;尘垢清除辅助轮安装在齿轮箱体外侧,分布在驱动轮两侧,防止驱动轮在钢丝绳上打滑发生错位,有助于驱动轮外表面中心处与钢丝绳表面接触,矿井钢丝绳尘垢清除机器人在直流减速电机的驱动下进行攀爬,尘垢清除辅助轮因为与钢丝绳间的摩擦力从而跟随机器人的上升而转动,齿轮箱体设置在上夹持与下夹持内侧表面,将尘垢清除辅助轮的转动转化为尘垢清除铜刷的转动,齿轮箱体包括相互啮合的箱体直齿圆柱齿轮A和箱体直齿圆柱齿轮B,箱体直齿圆柱齿轮A上设有与尘垢清除辅助轮连接的箱体转动轴C,箱体直齿圆柱齿轮A通过箱体转动轴A将动力传递给端部设置的箱体锥齿轮A,箱体锥齿轮A带动垂直其啮合的箱体锥齿轮B从而带动箱体转动轴B转动,箱体转动轴B带动连接的尘垢清除铜刷的转动,实现尘垢清除功能。
一种矿井钢丝绳尘垢清除机器人的工作方法,步骤包括准备阶段、工作阶段、回收阶段;
准备阶段:通过升降装置调节上夹持和下夹持的状态,首先使上抱紧装置中上夹持松开矿用钢丝绳,下夹持夹紧矿用钢丝绳,调节上夹持和下夹持之间的距离使机器人重心与矿用钢丝绳轴线基本重合,机器人在矿用钢丝绳上运行不会产生径向晃动幅度,然后上抱紧装置中上夹持夹紧矿用钢丝绳;
具体的,右锥齿轮C和左锥齿轮C与锥齿轮相互啮合,升降电机轴与锥齿轮连接,锥齿轮的转动,带动右锥齿轮C和左锥齿轮C转动;右锥齿轮B和左锥齿轮B分别与右传动轴和左传动轴连接,右锥齿轮C和左锥齿轮C的带动右传动轴和左传动轴转动;右锥齿轮C和左锥齿轮C分别与右锥齿轮A和左锥齿轮A啮合,从而右锥齿轮A和左锥齿轮A转动,通过右锥齿轮A和左锥齿轮A的转动使两个伸缩杆伸缩,伸缩杆与伸缩架铰接,其铰接处可沿下支撑架内表面滑动,从而使伸缩架上下升降,伸缩杆与伸缩架的配合,开始准备攀爬钢丝绳;
工作阶段:在准备阶段的抱紧与升降工作完成后,驱动装置中的直流减速电机开始运行并带动驱动轮转动,从而机器人在矿用钢丝绳上开始攀爬,攀爬过程中带动尘垢清除辅助轮的转动,接着通过齿轮箱体的一系列传动带动尘垢清除铜刷快速转动,在攀爬过程中对矿用钢丝绳进行尘垢清除;
回收阶段:完成矿用钢丝绳的尘垢清除后,上抱紧电机和下抱紧电机输出轴反向转动,从而使上夹持和下夹持松开矿用钢丝绳从而取下机器人,此时通过升降装置缩短机器人长度从而便于机器人的搬动与存放以待下次作业使用。
有益效果
1、本装置的升降装置、抱紧装置、尘垢清除装置及驱动装置,采用对称式设置,在机器人尘垢清除过程中具有较高的平稳性,从而可提高机器人的攀爬与尘垢清除速度;
2、矿井钢丝绳尘垢清除机器人,能够根据钢丝绳的具体情况,相应地调节升降装置,从而在攀爬钢丝绳的过程中更加灵活;
3、本装置由同一电机带动左右升降装置同时升降,保证机器人升降的平稳性,通过升降装置降低或升到机器人整体高度,机器人放置与安装方便,提高机器人攀爬时的平稳性,能够适应不同空间钢丝绳除垢工作,安装灵活、体积小、重量轻、结构紧凑,冲击力柔和,可实现频繁升降;
4、本装置的抱紧装置,结构简单,夹紧力度大,机器人能够稳定抱紧在钢丝绳上,产生足够摩擦力,可满足机器人的攀爬要求;
5、本装置的抱紧装置,可根据钢丝绳直径实现抱紧,从而节省了大量人力;
6、本装置的尘垢清除装置,采用机械式结构,除垢效率高,利用齿轮箱减少电机数量,防止尘垢清除时电机卡死现象,避免安全事故发生,安全系数高,防爆性好,维护管理较简单,结构装置简单,耐高温,可适应恶劣环境,经久耐用;
7、本装置的尘垢清除装置,不受钢丝绳和粉尘性质的限制,能够清除钢丝绳表面油污、粉尘、锈渍、积渣等各种尘垢,适用范围广,耗能少,尘垢清除效率高。
8、本装置的驱动装置,采用控制器同步控制直流减速电机,其同步性好,机器人攀爬稳定,采用无线遥控模块,可远距离操控机器人,操作方便,结构紧凑,传动平稳,响应迅速,调速方便;
9、相比传统的钢丝绳攀爬清洁作业,其能够满足各种要求,并具有结构简单、易操作、清洁力强等优点。
附图说明
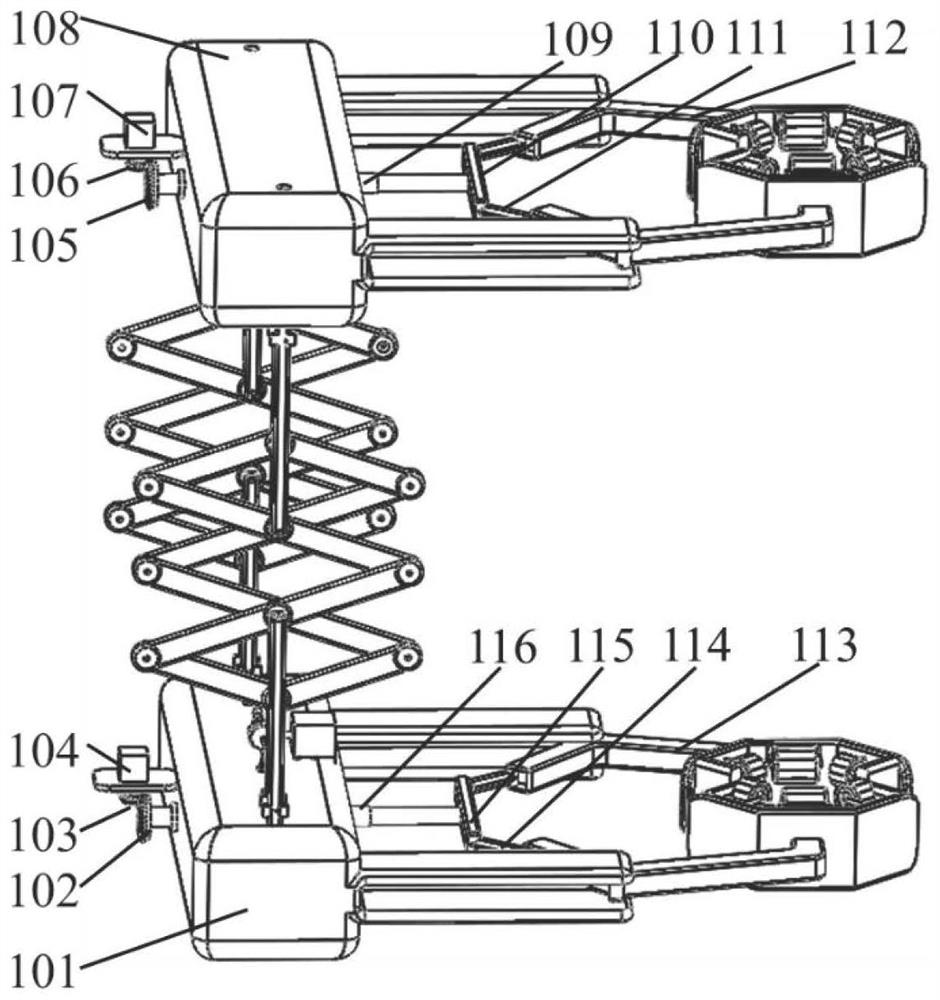
图1为本发明矿井钢丝绳尘垢清除机器人的结构示意图;
图2为本发明矿井钢丝绳尘垢清除机器人的升降装置结构示意图;
图3为本发明矿井钢丝绳尘垢清除机器人的升降装置的局部放大示意图;
图4为本发明矿井钢丝绳尘垢清除机器人的驱动装置结构示意图;
图5为本发明矿井钢丝绳尘垢清除机器人的除尘装置结构示意图;
图6为本发明矿井钢丝绳尘垢清除机器人的齿轮箱体内部结构示意图;
图7为本发明矿井钢丝绳尘垢清除机器人的驱动轮结构示意图;
图8为本发明矿井钢丝绳尘垢清除机器人升降装置上升示意图;
图9为本发明矿井钢丝绳尘垢清除机器人升降装置下降示意图;
图10为本发明矿井钢丝绳尘垢清除机器人夹持闭合示意图;
图11为本发明矿井钢丝绳尘垢清除机器人夹持打开示意图;
图12为本发明矿井钢丝绳尘垢清除机器人的侧视图。
图中:1、抱紧装置;2、升降装置;3、驱动装置;4、尘垢清除装置;101、下抱紧平台;102、下锥齿轮A;103、下锥齿轮B;104、下抱紧电机;105、上锥齿轮A;106、上锥齿轮B;107、上抱紧电机;108、上抱紧平台;109、上套筒;110、上连杆A;111、上连杆B;112、上夹持;113、下夹持;114、下连杆B;115、下连杆A;116、下套筒;201、左锥齿轮A;202、左锥齿轮B;203、伸缩杆;204、下支撑架;205、上支撑架;206、伸缩架;207、右锥齿轮A;208、右锥齿轮B;209、右传动轴;210、升降电机;211、右锥齿轮C;212、锥齿轮;213、左锥齿轮C;214、左传动轴;301、驱动轮;302、直流减速电机;303、弹簧;304、驱动轮支撑架;401、齿轮箱体;402、尘垢清除辅助轮;403、尘垢清除铜刷;404、箱体转动轴A;405、箱体锥齿轮A;406、箱体转动轴B;407、箱体锥齿轮B;408、箱体转动轴C;409、箱体直齿圆柱齿轮A;410、箱体直齿圆柱齿轮B
具体实施方案
下面结合附图对本发明作更进一步的说明。
如图1、图9和图10所示,一种矿井钢丝绳尘垢清除机器人及其使用方法,满足对矿井钢丝绳进行攀爬与尘垢清除的要求,可实现对钢丝绳进行高效无损尘垢清除。本发明公开了一种矿井钢丝绳尘垢清除机器人,包括抱紧装置、升降装置、尘垢清除装置及驱动装置;其中抱紧装置包括上抱紧装置和下抱紧装置,其中上抱紧装置设有用以夹住矿井钢丝绳的上夹持112,下抱紧装置设有用以夹住矿井钢丝绳的下夹持113,通过上下抱紧装置的配合,实现机器人抱紧钢丝绳;升降装置设置在上抱紧装置和下抱紧装置之间,工作时,通过升降装置调高上抱紧装置和下抱紧装置之间的距离,避免产生晃动,保证机器人攀爬的稳定性;驱动装置在上夹持112与下夹持113表面对称式设置,其设置在驱动轮支撑架304上用以为驱动轮提供动力,与抱紧装置配合,实现机器人在钢丝绳上攀爬;上夹持112与下夹持113的内表面上分别设有尘垢清除装置,尘垢清除装置在上夹持112与下夹持113表面对称式设置,与驱动装置相互配合,通过机械传动实现尘垢清除工作。
所述下抱紧装置包括下抱紧平台101、下锥齿轮A102、下锥齿轮B103、下抱紧电机104、下连杆A115、下夹持113和下连杆B114、下套筒116;下抱紧平台101与矿井钢丝绳反方向设有下锥齿轮对,下锥齿轮对包括下锥齿轮A102和下锥齿轮B103,下锥齿轮B103与下抱紧电机104输出轴连接,下锥齿轮A102与下套筒116连接,下抱紧电机104输出轴的转动带动下锥齿轮B103转动,下锥齿轮A102与下锥齿轮B103相互啮合,从而使下锥齿轮A102转动,最终带动下套筒116旋转;其中下连杆A115为T字型结构,下套筒116与下连杆A115下方的单杆结构伸缩连接,下套筒116内表面与下连杆A115外表面设有螺纹,下套筒116的旋转,带动下连杆A115下方的单杆前后伸缩,下连杆A115的双叉部分分别连接有两支下连杆B114,下连杆B114端部分别设置有下夹持113,两个下夹持113分别连接尘垢清除装置的两侧,下抱紧平台101位于下套筒116两侧设有辅助下连杆B114,下连杆B114与下抱紧平台101铰接,下连杆A115的伸缩,带动下连杆B114的转动;下连杆B114与下夹持113铰接,下连杆B114的转动,带动下夹持113以下抱紧平台101与下夹持113铰接为中心进行一定角度的转动,从而下夹持113打开闭合,实现抱紧装置抱紧钢丝绳。
所述上抱紧装置包括上抱紧平台108、上锥齿轮A105、上锥齿轮B106、上抱紧电机107、上连杆A110、上夹持112和上连杆B111、上套筒109;上抱紧装置与下抱紧装置对称式设置,保证机器人足够的夹紧力,便于适应不同直径钢丝绳,对机器人在攀爬过程中的平稳性也起到一定的作用;上抱紧装置与下抱紧装置抱紧钢丝绳,使矿井钢丝绳尘垢清除机器人夹紧在钢丝绳上,上抱紧装置中的上抱紧电机107进行反转,上抱紧电机107输出轴与上锥齿轮B106连接,从而上锥齿轮B106反向转动,上锥齿轮A105与上锥齿轮B106相互啮合,上套筒109内表面设有螺纹,上套筒109与上锥齿轮A105连接,从而带动上套筒109进行反转,上连杆A110为T字型结构,其外表面设有螺纹,上套筒109的反向转动,使上连杆A110反向运动,上连杆B111与上连杆A110铰接,上夹持112与上连杆B111铰接,从而使上夹持112打开一定的角度;下抱紧装置处于夹紧状态,上抱紧装置打开后处于非夹紧状态,此时通过升降装置完成矿井钢丝绳尘垢清除机器人整体升降功能,由于机器人长度的增长,保证了机器人攀爬的平稳性。
如图2、图7和图8所示,所述升降装置包括伸缩杆203、伸缩架206、升降电机210等;两个升降装置左右对称式设置,保证了矿井钢丝绳尘垢清除机器人升降时的平稳性,升降装置上支撑架205和下支撑架204分别连接上抱紧平台108和下抱紧平台101,用以调节上抱紧平台108与下抱紧平台101之间的距离。
首先机器人抱紧钢丝绳;其次上抱紧装置中上夹持112处于非夹紧钢丝绳状态,下夹持113处于夹紧钢丝绳状态;然后升降电机210与锥齿轮212连接,通过升降电机210的转动带动锥齿轮212转动,右锥齿轮C211和左锥齿轮C213与锥齿轮212相互啮合,右传动轴209和左传动轴214分别与右锥齿轮C211和左锥齿轮C213连接,锥齿轮212转动,带动右锥齿轮C211和左锥齿轮C213的转动,从而左传动轴214和右传动轴209转动,左锥齿轮A201与左传动轴214连接、右锥齿轮A207与右传动轴209连接,左传动轴201和右传动轴209的转动,带动左锥齿轮A201和右锥齿轮A207的转动,左锥齿轮A201与左锥齿轮B202相互啮合,右锥齿轮A207与右锥齿轮B208相互啮合,伸缩杆203外表面设有螺纹,其两个伸缩杆203外表面螺纹旋向相反,保证两伸缩杆203的同方向性;最后伸缩架206和连杆以铰接的形式进行连接,可进行升降,伸缩架206与伸缩杆203铰接,其铰接处可沿下支撑架204内表面滑动,从而使伸缩架206上下升降,伸缩杆203与伸缩架206的相互配合,实现升降功能,保证其攀爬时的平稳性。
如图3和图6所示,所述驱动装置包括上驱动装置和下驱动装置;两个驱动装置上下对称式设置,保证矿井钢丝绳尘垢清除机器人驱动时的稳定以及一致性,防止直流减速电机305出现超载现象,造成严重事故的发生。首先上下抱紧装置产生足够的夹紧力,机器人抱紧在钢丝绳上;然后控制直流减速电机302,驱动滚轮转动,使上下驱动装置的驱动轮同时转动,保证其同步性,实现机器人高效攀爬钢丝绳。
所述驱动装置包括弹簧303、驱动轮支撑架304、驱动轮301、直流减速电机302;驱动轮支撑架304与夹持机构连接,弹簧303放置在驱动轮支撑架304两轴上,驱动轮支撑架304两轴可沿配合孔前后伸缩,用以满足攀爬不同直径的钢丝绳,弹簧303用于产生夹紧力,使机器人抱紧在钢丝绳上,矿井钢丝绳尘垢清除机器人在钢丝绳攀爬遇到障碍时,通过弹簧303也可进行一定的越障;驱动轮301与驱动轮支撑架304连接,驱动轮301外表面采用橡胶材质,摩擦系数大,并在其外表面进行纹理处理,增大摩擦,防滑效果好,直流减速电机302输出轴与驱动轮301中心孔键连接,用于驱动滚轮转动,直流减速电机302通过驱动器控制正反转以及停止,保证所有直流减速电机302同时运转,实现机器人攀爬钢丝绳的功能。
如图4和图5所示,所述尘垢清除装置包括上尘垢清除装置和下尘垢清除装置;上尘垢清除装置和下尘垢清除装置分别与上驱动装置和下驱动装置配合,实现机器人攀爬的同时带动尘垢清除铜刷403快速转动,从而进行钢丝绳尘垢清除工作。
所述尘垢清除装置包括尘垢清除辅助轮402、尘垢清除铜刷403和齿轮箱体401等;尘垢清除辅助轮402具有一定的导向作用,有助于机器人沿钢丝绳中心轴线攀爬,保证机器人竖直攀爬时的平稳性,矿井钢丝绳尘垢清除机器人在直流减速电机302的驱动下进行攀爬,尘垢清除辅助轮402跟随驱动轮301的转动而转动,箱体转动轴C408与尘垢清除辅助轮402连接,从而箱体转动轴C408转动,箱体直齿圆柱齿轮A409与箱体转动轴C408连接,箱体直齿圆柱齿轮B410与箱体直齿圆柱齿轮A409相互啮合,箱体转动轴C408的转动,使得箱体直齿圆柱齿轮B410转动,箱体转动轴A404与箱体直齿圆柱齿轮B410连接,箱体锥齿轮A405与箱体锥齿轮B407相互啮合,箱体转动轴B406与箱体锥齿轮B407连接,尘垢清除铜刷403设置在箱体转动轴的一端,箱体转动轴B406的转动,带动尘垢清除铜刷403的转动,实现尘垢清除清洁功能。
一种矿井钢丝绳尘垢清除机器人的使用方法,其特征在于:包括准备阶段、工作阶段、回收阶段;
准备阶段:通过升降装置2调节上夹持112和下夹持113的状态,首先使上抱紧装置中上夹持112松开矿用钢丝绳,下夹持113夹紧矿用钢丝绳,调节上夹持112和下夹持113之间的距离使机器人重心与矿用钢丝绳轴线基本重合,机器人在矿用钢丝绳上运行不会产生径向晃动幅度,然后上抱紧装置中上夹持112夹紧矿用钢丝绳,开始准备攀爬钢丝绳;
具体的,右锥齿轮C211和左锥齿轮C213与锥齿轮212相互啮合,升降电机210轴与锥齿轮212连接,锥齿轮212的转动,带动右锥齿轮C211和左锥齿轮C213转动;右锥齿轮B208和左锥齿轮B202分别与右传动轴209和左传动轴214连接,右锥齿轮C211和左锥齿轮C213的带动右传动轴209和左传动轴214转动;右锥齿轮C211和左锥齿轮C213分别与右锥齿轮A207和左锥齿轮A201啮合,从而右锥齿轮A207和左锥齿轮A201转动,通过右锥齿轮A207和左锥齿轮A201的转动使两个伸缩杆203伸缩,伸缩杆203与伸缩架206铰接,其铰接处可沿下支撑架204内表面滑动,从而使伸缩架206上下升降,伸缩杆203与伸缩架206的配合;
工作阶段:在准备阶段的抱紧与升降工作完成后,驱动装置中的直流减速电机302开始运行并带动驱动轮306转动,从而机器人在矿用钢丝绳上开始攀爬,攀爬过程中带动尘垢清除辅助轮402的转动,接着通过齿轮箱体401的一系列传动带动尘垢清除铜刷403快速转动,在攀爬过程中对矿用钢丝绳进行尘垢清除;
回收阶段:完成矿用钢丝绳的尘垢清除后,上抱紧电机107和下抱紧电机104输出轴反向转动,从而使上夹持112和下夹持113松开矿用钢丝绳从而取下机器人,此时通过升降装置缩短机器人长度从而便于机器人的搬动与存放以待下次作业使用。
- 一种矿井钢丝绳尘垢清除机器人及工作方法
- 一种用于锅炉、烟气管道内烟气尘垢的自动化清除设备