一种水体中定位放样的施工方法
文献发布时间:2023-06-19 19:18:24
技术领域
本发明涉及测绘技术领域,尤其涉及一种水体中定位放样的施工方法。
背景技术
当前,在测绘领域通常采用全站仪进行距离及角度的测量。全站仪因一次安置仪器就可完成该测站上全部测量工作,广泛用于地上大型建筑和地下隧道施工等精密工程测量或变形监测领域。全站仪,即全站型电子测距仪,是一种集光、机、电为一体的高技术测量仪器,是集水平角、垂直角、距离(斜距、平距)、高差测量功能于一体的测绘仪器系统。全站仪放样指将图纸上设计的位置在实地标定出来,放样目标通常为棱镜对中杆,并以此作为测量目标,由于棱镜在水中无法被全站仪观测到,因而无法在水中使用。当前在水下工程中需要进行测量定位时,主要是把水下测控点转移到水面上来完成。
相关技术中,通常采用浮船加振动锤施工法或围堰施工法进行水体中定位测量设备的放样施工。然而,本申请发明人在实现本申请实施例中发明技术方案的过程中,发现上述技术存在如下问题:
采用浮船加振动锤施工法和围堰施工法进行水体中定位测量设备放样施工,通常都是应用在水下地质环境比较简单的环境中,例如天然河流中。而人工渠、运河等通常都有坚硬河床护底,通常采用钢筋混凝土河床。另外,在河床含有河底隧道的河流中,除了坚硬河床护底外,还有岩石层和砂砾层,水下地质环境十分复杂。当前还没有针对在同时包含有沙、石、泥、深部水泥基底或河下隧道层等复杂地质环境的水体中进行定位测量设备放样的施工方法,传统的方法在有坚硬的河床混凝土护底、河床干砌石护底及含河底隧道的等河流中不容易实施,适用性不强。因此,亟需提出一种新的水体中定位测量设备的放样施工方法,以此实现在复杂地质水下环境下,方便进行水体中定位测量设备的放样施工。
发明内容
基于此,本发明提供了一种水体中定位放样的施工方法,通过采用沉井法的方式在复杂地质环境水下进行水体中定位测量设备的放样施工,可以解决传统方法不易在有坚硬河床护底或含河底隧道等复杂地质环境下进行放样施工的难题,并提出一种新的水体中定位测量设备的放样施工方法,实现方便、高效地在水体中进行定位放样施工。
本发明提供的方法,具体包含如下步骤:
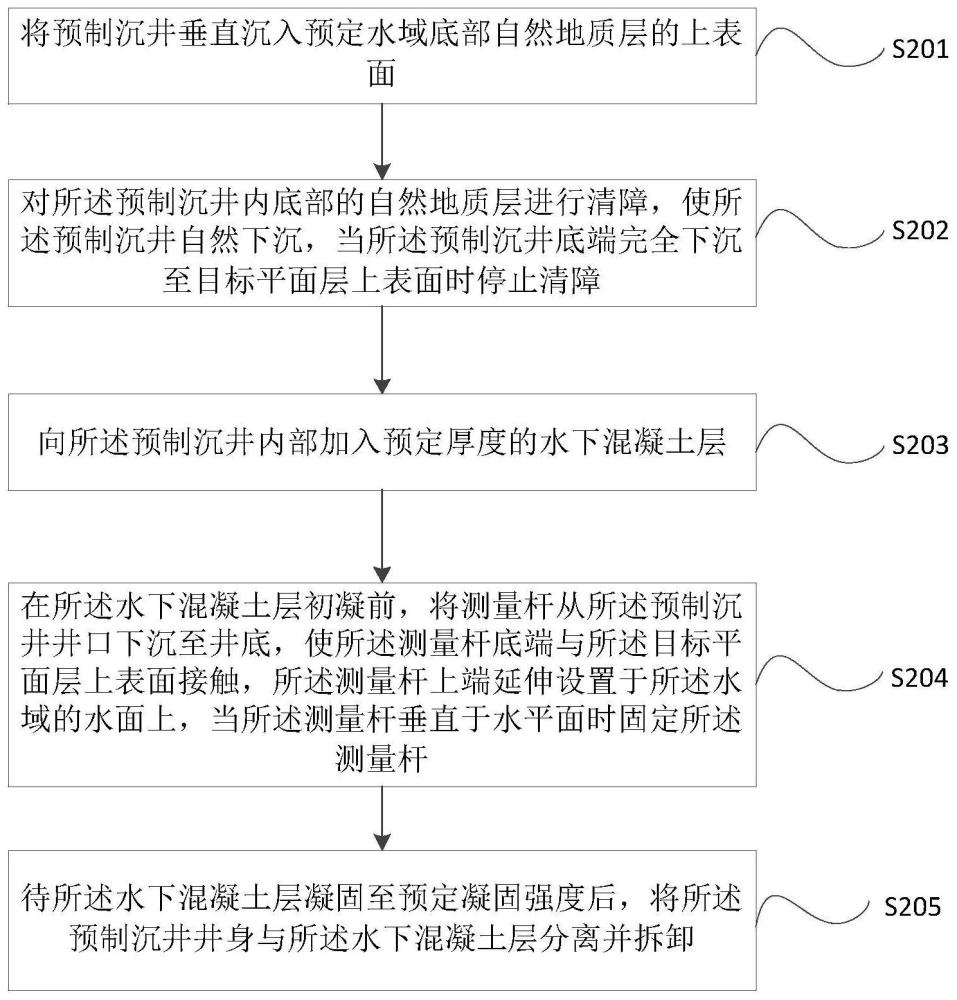
将预制沉井垂直沉入预定水域底部自然地质层的上表面;
对所述预制沉井内底部的自然地质层进行清障,使所述预制沉井自然下沉,当所述预制沉井底端完全下沉至目标平面层上表面时停止清障;
向所述预制沉井内部加入预定厚度的水下混凝土层;
在所述水下混凝土层初凝前,将测量杆从所述预制沉井井口下沉至井底,使所述测量杆底端与所述目标平面层上表面接触,所述测量杆上端延伸设置于所述水域的水面上,当所述测量杆垂直于水平面时固定所述测量杆;
待所述水下混凝土层凝固至预定凝固强度后,将所述预制沉井井身与所述水下混凝土层分离并拆卸。
进一步地,所述预制沉井采用井身可拆卸分离式钢沉井。
进一步地,所述预制沉井包括,在所述预制沉井内表面底端至轴向预定距离内可分离式设置有硂隔离层,所述硂隔离层与所述预制沉井的井身粘接。
进一步地,所述测量杆包括:棱镜装置和杆部,所述棱镜装置设置于所述杆部的顶端,所述杆部的底端与所述目标平面层上表面接触并固定设置在所述水下混凝土层内部,所述杆部采用可伸缩式杆;
所述棱镜装置包括:底座、支架、棱镜、接收驱动模块及遥控装置,所述底座设置于所述杆部的顶端,所述支架可旋转式设置于所述底座上部,所述棱镜可旋转设置于所述支架内部,所述接收驱动模块设置于所述底座内部并分别与所述支架和所述棱镜电性连接,用于接收所述遥控装置发出的信号并根据所述信号驱动所述支架和/或所述棱镜进行旋转。
进一步地,所述测量杆采用杆基连体件,所述杆基连体件包括测量杆体和预定厚度的预制独立基础,所述测量杆体的底端固定垂直设置于所述预制独立基础上表面并延伸至所述预制独立基础内部,所述测量杆体上端延伸设置于所述水域水面上预定距离。
进一步地,当所述预制沉井底端完全下沉至所述目标平面层上表面时停止清障包括:先探明所述预定水域底部自然地质层和目标平面层上表面的深度范围后进行所述预制沉井的下沉,当所述预制沉井底端完全下沉至所述目标平面层上表面的深度时停止清障。
进一步地,当所述预制沉井底端完全下沉至所述目标平面层上表面时停止清障包括:在下沉完成后,采用人工法进行触摸探明所述预制沉井底端与所述目标平面层上表面的是否完全接触,若完全接触时停止清障。
进一步地,将测量杆从所述预制沉井井口下沉至井底,使所述测量杆底端与所述目标平面层上表面接触包括:
采用履带吊将所述测量杆吊装至所述预制沉井井口处并下放;
在所述预制沉井井身相邻侧面的预定位置处设置控制点坐标,下沉过程中采用全站仪测量所述测量杆的基础中心线角度以保证所述预制独立基础的角度达到预定范围;
当所述预制独立基础下放至所述水下混凝土层预定位置后,对所述测量杆顶部施加预定压力。
进一步地,待所述水下混凝土层凝固至预定凝固强度后,将所述预制沉井的井身分离并拆卸包括:所述水下混凝土层采用C35混凝土,所述预定凝固强度为至少75%。
进一步地,当所述测量杆垂直于水平面时固定所述测量杆包括:当所述测量杆垂直于水平面时,采用井字形钢架将所述测量杆的位置固定。
本申请实施例提供的技术方案带来的有益技术效果至少包括:
第一、通过沉井法将预制沉井从预定水域底部自然地质层的上表面下沉至目标平面层上表面,并将测量杆通过水下混凝土固定连接在目标平面层的上表面,以此完成水体中定位测量设备的放样。由于当前还没有能够针对如同时包含有沙、石、泥、深部水泥基底或河下隧道层等复杂地质环境的水体中定位测量设备的放样施工方法,传统的水体中定位测量设备放样施工方法适用性不够强,如浮船加振动锤施工法和围堰施工法等不容易实施。因此,本发明实施例提供的方法可以更方便、容易地实现在水体中进行定位测量设备的放样施工,适用性更强;
第二、由于本发明实施例中的水体中进行定位放样的施工方法采用了预制的可拆卸分离式沉井对水体中定位测量设备进行建模,相比传动沉井法、围堰法等方法进行水体中定位测量设备建模,更高效、设备重复利用率高、更经济;
第三、本发明实施例中的方法改进了沉井分离工艺,通过可拆卸分离式结构以及硂隔离层的设置,使封底混凝土可以迅速脱模,相比传统方法,减少沉井脱模时间,也避免沉井底部因无法脱模而需要预留一节的工程用量,提高沉井的重复利用率,节省了工期。
第四、由于本发明实施例中的水体中进行定位放样的施工方法的采用了可伸缩式测量杆,用户在测量时不受水体水位变化的影响,因此更加方便,适用性更强;
第五、由于本发明实施例中的水体中进行定位放样的施工方法的采用了遥控可旋转式棱镜装置,使得用户在采用全站仪进行测量的过程中,可以在远处遥控操作定位测量设备,因此,使用过程更加方便、快捷和高效。
附图说明
图1为本申请实施例提供的一种水体中定位放样的施工方法的流程图;
图2为本申请实施例提供的一种采用沉井法完成水体中进行定位测量设备放样的原理示意图;
图3为本申请实施例提供的一种采用硂隔离层的方形钢沉井的结构示意图;
图4为本申请实施例提供的一种采用可遥控旋转式棱镜装置的测量杆的结构示意图;
图5为本申请实施例提供的一种测量杆采用杆基连体件完成水体中进行定位测量设备放样的原理示意图;
附图标记:
水体-1、目标平面层-2、预制沉井-3、水下混凝土层-4、测量杆-5、泄水孔-6、局部加劲条-7、三角形加劲肋-8、硂隔离层-9、棱镜装置-10、杆部-11、底座-12、支架-13、棱镜-14、接收驱动模块-15、预制独立基础-16。
具体实施方式
需要说明的是,在不冲突的情况下,本申请中的实施例以及实施例中的特征可以相互组合。本发明的说明书和权利要求书及附图中的术语“第一”、“第二”等是用于区别类似的对象,而不用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如包含了一系列步骤S或单元的过程、方法、系统、产品或设备不必限于清楚的列出的那些步骤S或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其他步骤S和单元。
为使本技术领域的人员更好地理解本发明方案,下面结合本发明实施例中的附图,对本发明实施例中的方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得所有其他实施例,都应当属于本发明保护的范围。以下结合附图,详细说明本申请各实施例提供的技术方案。
实施例一
本发明实施例提供的一种水体中定位测量设备的放样施工方法,图1为本申请实施例提供的一种水体中定位测量设备的放样施工方法的流程图,图2为本申请实施例提供的一种采用沉井法完成水体中进行定位测量设备放样的原理示意图,如图1和图2所示,包括:
步骤S201、将预制沉井3垂直沉入预定水域底部自然地质层的上表面。
具体的,所述自然地质层为没有人为加工、改造的地质层,例如包括砂砾层、岩石层等。
需要说明的是,所述预制沉井3可以采用整体式预制沉井3的方式,也可以采用井身可拆卸分离式沉井的方式,即井身由两个或以上的部分组合而成,并且各部分能够进行拆卸分离;所述预制沉井3的形状采用长方体形或圆柱形,或其他柱体形状,此处不做限定。
优选的,为了方便沉井在自身重力下顺利下沉以及方便设计成为井身可拆卸分离式的钢制沉井。
在一种可能实现的方式中,所述预制沉井3采用井身可拆卸分离式沉井的方式包括:所述预制沉井3采用圆柱形沉井,以垂直于水平面的方向沉入预定水域底部,所述预制沉井3采用被铅锤平面平分为两部分的可拆卸分离式沉井,该两部分的连接处由可拆卸连接件进行连接或者拆卸。
通过上述方式,可以方便预制沉井3的拆卸,以及方便后期封底混凝土的脱模施工,提升了整体施工效率。
步骤S202、对所述预制沉井3内底部的自然地质层进行清障,使所述预制沉井3自然下沉,当所述预制沉井3底端完全下沉至目标平面层2上表面时停止清障。
具体的,所述目标平面层2表示水底包含深部水泥基底或河下隧道层的坚硬河床层。
在一种可实现的方式中,对所述预制沉井3内底部的自然地质层进行清障,通常采用机械设备如水下炮机、挖机、泥浆泵等对预制沉井3内底部进行分解、挖掘和抽排施工,当自然地质层被清障后,预制沉井3在自身重力作用下自然下沉。
由于传统的水体中定位测量设备放样施工方法适用性不够强,如浮船加振动锤施工法和围堰施工法等不容易实施。为了能够在同时包含有沙、石、泥、深部水泥基底或河下隧道层等复杂地质环境下完成水体1中进行定位测量设备的放样施工,可选的,通过采用预制沉井3的方式,可以更方便、容易地实现在水体1中进行定位测量设备的放样施工,适用性更强。
步骤S203、向所述预制沉井3内部加入预定厚度的水下混凝土层4。
具体的,所述预定厚度根据实际施工设计方案的水体1中环境如潮汐力大小、后期拆卸难度等而确定。
为了使后续下放的测量杆5固定在该目标平面层2上表面,可选的,采用水下混凝土层4制作基体将测量杆5与目标平面层2进行紧密连接。
在一种可能实现的方式中,向所述预制沉井3内部加入预定厚度的水下混凝土层4的方式包括,首先向所述预制沉井3内部加入预设形状的钢筋骨架,然后向所述预制沉井3内部加入预定厚度的水下混凝土层4。
通过上述方式,可以使水体1中定位测量设备固定得更加牢固、稳定性更强。
步骤S204、在所述水下混凝土层4初凝前,将测量杆5从所述预制沉井3井口下沉至井底,使所述测量杆5底端与所述目标平面层2上表面接触,所述测量杆5上端延伸设置于所述水域的水面上,当所述测量杆5垂直于水平面时固定所述测量杆5。
具体的,所述测量杆5通常采用单独杆体的方式,或者采用单独杆体加下端连接有加固件的组合体的方式。
为了使测量杆5与目标平面层2紧密而牢固地连接成为一个整体,并且使测量杆5在外力如潮汐力的作用下不发生倾斜,可选的,测量杆5采用测量杆5体加下端为钢筋骨架的组合体的方式;为了使测量杆5方便被全站仪进行观测,因而使测量杆5上端延伸设置于所述水域的水面上,并保证测量杆5垂直于水平面设置。
在一种可能实现的方式中,将测量杆5从所述预制沉井3井口下沉至井底的过程中方式包括,在测量杆5下沉的过程中旋转和下压该测量杆5,从而可以使所述测量杆5完全下沉至所述目标平面层2上表面。
在一种可能实现的方式中,当所述测量杆5垂直于水平面时固定所述测量杆5的方式包括,通过铅锤仪测量所述测量杆5是否垂直于水平面,并通过限位固定装置固定所述测量杆5的上部,如采用十字形或井字形钢架分别与所述测量杆5和所述预制沉井3的上沿四周焊接。
通过上述方式,可以保证定位测量设备的放样质量,提高了放样效率和钢沉井的周转利用率,整个放样过程无人员下井,无沉井抽水施工,从而大大减少安全风险,并且,使水体1中定位测量设备固定得更加牢固,相比采用水体中进行定位放样的施工方法,测量杆5稳定性更强、安全性更高。
步骤S205、待所述水下混凝土层4凝固至预定凝固强度后,将所述预制沉井3井身与所述水下混凝土层4分离并拆卸。
具体的,混凝土凝固强度随着固化时间增加而增强,例如采用425号普通硅酸盐水泥配制的混凝土在自然条件下养护,环境温度20℃时,7天可达到设计强度的60%,28天可达到设计强度的95~100%。
在一种可能实现的方式中,所述预制沉井3采用整体式预制沉井3的方式,在保证水下混凝土层4凝固得较稳定避免出现由于震动等原因造成开裂甚至与目标平面层2脱离的情况,同时考虑节省工期以及便于封底混凝土迅速脱模的情况,可选的,待所述水下混凝土层4凝固至60%以上的强度时,通过起重设备将所述预制沉井3井身垂直于水面直接拔出。
由此可见,本发明实施例中,所述复杂地质环境下的水体中进行定位放样的施工方法,与现有技术相比,至少具备以下技术效果:
第一、通过沉井法将预制沉井3从预定水域底部自然地质层的上表面下沉至目标平面层2上表面,并将测量杆5通过水下混凝土固定连接在目标平面层2的上表面,以此完成水体1中定位测量设备的放样。由于当前还没有能够针对如同时包含有沙、石、泥、深部水泥基底或河下隧道层等复杂地质环境的水体中定位测量设备的放样施工方法,传统的水体中定位测量设备放样施工方法适用性不够强,如浮船加振动锤施工法和围堰施工法等不容易实施。因此,本发明实施例提供了一种新的方法,可以更方便、容易地实现在水体中进行定位测量设备的放样施工,适用性更强;
第二、由于本发明实施例中的水体中进行定位放样的施工方法采用了预制的可拆卸分离式沉井对水体中定位测量设备进行建模,相比传动沉井法、围堰法等方法进行水体中定位测量设备建模,更高效、设备重复利用率高、更经济。
实施例二
在上述实施例的基础上,本发明还提供了另一种水体中定位测量设备的放样施工方法,如图3、图4和图5所示,包括如下步骤;
步骤S301、将钢沉井垂直沉入预定水域底部自然地质层的上表面,所述钢沉井为井身可拆卸分离式钢沉井。
在一个优选的示例性实施例中,所述钢沉井采用水平横截面为方形的沉井,在所述预制沉井3的井身顶部至轴向预定距离内设置有若干贯穿井身的泄水孔6,用于使所述预制沉井3井内外水位保持一致;在所述预制沉井3井身的四条菱角处,分别设置有若干可拆卸式加固件。
具体的,所述钢沉井采用水平横截面为方形的沉井包括采用长方形或正方形的钢沉井;所述可拆卸式加固件包括连接两个面的局部加劲条7、设置于菱角处的三角形加劲肋8等。
由于在钢沉井下放以及下放水下混凝土等物料的过程中,会造成井内的水压大于井外的水压,从而使井内水位高于井外水位,进而可能导致钢沉井井身受到不规则力造成晃动,为了解决上述问题,可选的,在预制沉井3的井身顶部至轴向预定距离内设置有若干贯穿井身的泄水孔6,以便快速平衡井内外压力;由于在水下混凝土等物料的下沉过程或混凝土的凝结过程中,可能会产生局部较大膨胀力,使得钢沉井井身连接件失效,从而使钢沉井井身发生变形以致造成混凝土外泄,为了解决上述问题,可选的,在所述预制沉井3井身的四条菱角处,分别设置有若干可拆卸式加固件,用于使所述预制沉井3井身相邻的两面连接或分离。
在一种可能实现的方式中,钢沉井采用井身可拆卸分离式沉井的方式包括:所述钢沉井采用四面可拆卸分离式,即四个面分别通过可拆卸式加固件进行连接,以此可以使水下混凝土在脱模时更省时省力。
在一个优选的实施例中,所述预制沉井3包括,在所述预制沉井3内表面底端至轴向预定距离内可分离式设置有硂隔离层9。图3为本申请实施例提供的一种采用硂隔离层9的方形钢沉井的结构示意图,如图3所示:
具体的,硂隔离层9是指设置于混凝土层于模具之间的隔层。
为了方便在混凝土凝固后快速脱模,可选的,在所述预制沉井3内表面底端至轴向预定距离内可分离式设置硂隔离层9。
在一种可能实现的方式中,所述硂隔离层9采用挤塑板,所述挤塑板通过结构胶与所述预制沉井3井身粘接。
具体的,挤塑板通常采用挤塑聚苯乙烯泡沫板。
为了使混凝土凝固后快速脱模,可选的,所述硂隔离层9采用50mm挤塑板,采用50mm挤塑板通过结构胶与所述预制沉井3井身粘接。
本发明实施例中,通过可拆卸分离式结构以及硂隔离层9的设置,使封底混凝土可以迅速脱模,相比传统方法,减少沉井脱模时间,也避免沉井底部因无法脱模而需要预留一节的工程用量,提高沉井的重复利用率,节省了工期,提升了整体施工效率。
步骤S302、对所述预制沉井3内底部的自然地质层进行清障,使所述预制沉井3自然下沉,当所述预制沉井3底端完全下沉至目标平面层2上表面时停止清障。
需要说明的是,本步骤中的具体实施方式可参照上述实施例一中步骤S202的详细说明,此处不再赘述。
在一种可实现的方式中,对所述预制沉井3内底部的自然地质层进行清障,采用水下炮机配合长臂挖机和/或浮挖。
本发明实施例中,由于传统的水体1中定位测量设备放样施工方法适用性不够强,如浮船加振动锤施工法和围堰施工法等不容易实施。为了能够在同时包含有沙、石、泥、深部水泥基底或河下隧道层等复杂地质环境下完成水体1中进行定位测量设备的放样施工,可选的,通过采用预制沉井3的方式,可以更方便、容易地实现在水体1中进行定位测量设备的放样施工,适用性更强。
在一个优选的实施例中,当所述预制沉井3底端完全下沉至所述目标平面层2上表面时停止清障包括:在所述预制沉井3的井身相邻侧面的预定位置处设置控制点坐标,所述预制沉井3底端下沉过程中采用全站仪测量所述控制点坐标,当所述预制沉井3底端完全下沉至所述目标平面层2上表面对应的控制点坐标时,停止清障,以确保沉钢井下沉位置准确。
为了能够快速而精确地测量出预制沉井3下放的位置,以此判断是否满足预定要求,可选的,在预制沉井3井身相邻侧面的预定位置处设置控制点坐标,下沉过程中采用全站仪测量所述控制点坐标。
在一种可能实现的方式中,采用全站仪测量的方式包括:钢沉井下沉前,在相邻侧面顶面往下1200mm位置做测量控制点,钢沉井下沉过程中,岸边采用全站仪测量控制点坐标,确保沉钢井下沉位置准确,吊装时在钢沉井四边角上设置缆风绳,拉缆风绳的作业人员根据司索信号工指示配合履带吊随时调整钢沉井位置。在进行水下混凝土构筑物、河床清理时须在机械大臂上按照地下通道顶板结构高程作高程控制线,并用全站仪过程控制机械大臂进尺深度,以防止因标高控制不到位损伤目标平面层2的顶板防水层或防水保护层。
本发明实施例中,通过采用全站仪测量所述控制点坐标,确保沉井下沉位置准确,大大降低基础施工的风险,提升了可靠性、安全性。
图4为本申请实施例提供的一种采用可遥控旋转式棱镜装置10的测量杆5的结构示意图,请参照图4。在一个优选的实施例中,所述测量杆5包括:棱镜装置10和杆部11,所述棱镜装置10可拆卸设置于所述杆部11的顶端,所述杆部11的底端与所述目标平面层2上表面接触并固定设置在所述水下混凝土层4内部,所述杆部11采用可伸缩式杆;
所述棱镜装置10包括:底座12、支架13、棱镜14、接收驱动模块15及遥控装置,所述底座12设置于所述杆部11的顶端,所述支架13可旋转式设置于所述底座12上部,所述棱镜14可旋转设置于所述支架13内部,所述接收驱动模块15设置于所述底座12内部并分别与所述支架13和所述棱镜14电性连接,用于接收所述遥控装置发出的信号并根据所述信号驱动所述支架13和/或所述棱镜14进行旋转;所述遥控装置设置于远端,用于向所述接收驱动模块15发送指令,优选的,所述遥控装置采用发送红外线的方式进行指令发送。
为了使测量杆5能被方便和有效地设置在水体1中,因此,采用包括棱镜装置10和杆部11的测量杆5,以替代传统测绘方法使用的棱镜14对中杆;为了方便对测量杆5的安装以及对棱镜装置10的保护,并使棱镜装置10满足可重复利用的条件,可选的,棱镜装置10采用可拆卸的方式设置于所述杆部11的顶端。
在一种可能实现的方式中,在所述棱镜装置10底座12的底部和所述杆部11顶端同时设置有正反螺纹,通过所述正反螺纹使所述棱镜装置10与所述杆部11可拆卸连接;优选的,在所述棱镜装置10底座12的底部设置有螺母,在所述杆部11顶端设置有与所述螺母配对的螺栓。
由于江河等水体1的水位随时都可能发生变化,可能因为测量杆5的高度不够而被淹没,为了使用户在测量时不受水体1水位变化的影响,可选的,测量杆5采用可伸缩式测量杆5。
在一种可能实现的方式中,所述杆部11采用套筒式伸缩杆,所述套筒式伸缩杆包括若干外筒和内筒,所述外筒和所述内筒的法兰片上装有限位杆,所述外筒的内壁上设有限位块,所述外筒和所述内筒之间由V型橡胶圈来密封。
由于作为被观测装置的测量杆5设置于水体1中央,观测装置通常位于距离较远的地方,为了方便对测量杆5的调节,可选的,所述棱镜装置10采用可遥控旋转式棱镜装置10。
在一种可能实现的方式中,所述支架13采用U形支架,所述U形支架的下端通过一支点可旋转设置于底座12上表面;所述棱镜14采用圆形镜,所述圆形镜通过外沿径向两侧的两个支点可旋转设置于U形支架的上端,所述两个支点与U形支架上端的两个支点分别可旋转式连接;优选的,所述底座12的上表面还设置有气泡式水准仪,可选的,所述气泡式水准仪采用圆形,该气泡式水准仪的圆形平面与底座12上表面平行设置;优选的,所述接收驱动模块15设置于所述底座12内部并分别与所述支架13和所述棱镜14电性连接,所述接收驱动模块15包括驱动电机和传动装置,驱动电机驱动传动装置使U形支架可以以预定速率在底座12上正向或反向旋转,驱动电机驱动传动装置还可以使圆形镜以预定速率在U形支架正向或反向旋转,以此实现棱镜14在任意角度的调节;可选的,所述接收驱动模块15还包括接收单元,所述接收单元用于接收所述遥控装置发出的信号并根据所述信号驱动所述支架13和/或所述棱镜14进行旋转。
本发明实施例中,通过采用可伸缩式测量杆5,用户在测量时不受水体1水位变化的影响,因此更加方便,适用性更强;通过采用遥控可旋转式棱镜装置10,使得用户在采用全站仪进行测量的过程中,可以在远处遥控操作定位测量设备,因此,使用过程更加方便、快捷和高效。
图5为本申请实施例提供的一种测量杆5采用杆基连体件完成水体1中进行定位测量设备放样的原理示意图,如图5所示。在一个优选的实施例中,所述测量杆5采用杆基连体件,所述杆基连体件包括测量杆5体和预定厚度的预制独立基础16,所述测量杆5体的底端固定垂直设置于所述预制独立基础16上表面并延伸至所述预制独立基础16内部,所述测量杆5体上端延伸设置于所述水域水面上预定距离。
为了使测量杆5与目标平面层2紧密而牢固地连接成为一个整体,并且使测量杆5在外力如潮汐力的作用下不发生倾斜,可选的,所述测量杆5采用包括测量杆5体和预定厚度的预制独立基础16两部分组成的杆基连体件。
本发明实施例中,测量杆5通过采用包括测量杆5体和预制独立基础16杆基连体件,使测量杆5与目标平面层2连接得更稳固,并且减少了水下混凝土用量,减少了水下混凝土层4凝固时间,提升了施工和放样效率。
在一个优选的实施例中,当所述预制沉井3底端完全下沉至所述目标平面层2上表面时停止清障包括:先探明所述预定水域底部自然地质层和目标平面层2上表面的深度范围后进行所述预制沉井3的下沉,当所述预制沉井3底端完全下沉至所述目标平面层2上表面的深度时停止清障。
为了可以更方便而高效地进行预制沉井3内的清障施工,可选的,采用地质探测仪探明预定水域底部自然地质层和目标平面层2上表面的深度范围,根据测量的深度范围和预制沉井3下沉深度确定停止清障施工的时刻。
在一种可能实现的方式中,探明所述预定水域底部自然地质层和目标平面层2上表面的深度范围的方式包括,获取所述预定水域河下隧道层的建筑图纸,根据图纸标记获取预定水域底部自然地质层和目标平面层2上表面的深度范围。
本发明实施例中,通过先探明各种地质层结果及深度范围后再进行预制沉井3内的清障施工,可以预先确定沉井下沉深度,确保沉井下沉位置准确,提升施工和放样效率。
在一个优选的实施例中,当所述预制沉井3底端完全下沉至所述目标平面层2上表面时停止清障包括:在下沉完成后,采用人工法进行触摸探明所述预制沉井3底端与所述目标平面层2上表面的是否完全接触,若完全接触时停止清障。
由于在预制沉井3底端完全下沉至所述目标平面层2上表面时,接触面可能残留大石块、大混凝土碎块等异物以致于不能完全接触,进而导致混凝土外泄使水体1中进行定位测量设备的放样无法完成。
在一种可能实现的方式中,采用人工法进行触摸探明的方式包括:在预定水域底部自然地质层构造物破除清理后,派专业潜水员通过触摸探明隧道顶板位置是否残留大石块、大混凝土碎块,以确定是否具备下放沉井施工条件,方可进行下一步骤施工。
通过采用人工法进行触摸探明的方式,确保沉井下沉位置准确,大大降低基础施工的风险,进一步提升了可靠性和安全性。
步骤S303、向所述预制沉井3内部加入预定厚度的水下混凝土层4。
需要说明的是,本步骤中的具体实施方式可参照上述实施例一中步骤S203的详细说明,此处不再赘述。
在一个优选的示例性实施例中,所述水下混凝土层4采用C35混凝土。
具体的,C35是普通混凝土强度等级中的一个等级,c35混凝土强度一般在35帕到40帕之间,具体数值需根据C35混凝土的搅拌的时间、混合比例等方面来决定。水下混凝土一般配比同陆上混凝土相同,但由于受水的影响,水下混凝土一般会比同条件下的陆混凝土低一个强度等级,但同时保证具有抵抗泌水和分离的稳定性,水下浇筑的混凝土其水泥用量要求比一般混凝土多,因而水下混凝土的强度等级不易提升到更高。
为了使水下混凝土达到预定强度范围同时又兼顾水下凝固性能,可选的,水下混凝土层4采用C35混凝土,以此提升水下混凝土层4的综合性能,进而提升水体1中进行定位测量设备的放样的可靠性。
步骤S304、在所述水下混凝土层4初凝前,将测量杆5从所述预制沉井3井口下沉至井底,使所述测量杆5底端与所述目标平面层2上表面接触,所述测量杆5上端延伸设置于所述水域的水面上,当所述测量杆5垂直于水平面时固定所述测量杆5。
需要说明的是,本步骤中的具体实施方式可参照上述实施例一中步骤S204的详细说明,此处不再赘述。
优选的,将测量杆5从所述预制沉井3井口下沉至井底,使所述测量杆5底端与所述目标平面层2上表面接触包括如下步骤:
步骤S3041、采用履带吊将所述测量杆5吊装至所述预制沉井3井口处并下放;
步骤S3042、在所述预制沉井3井身相邻侧面的预定位置处设置控制点坐标,下沉过程中采用全站仪测量所述测量杆5的基础中心线角度以保证所述预制独立基础16的角度达到预定范围;
步骤S3043、当所述预制独立基础16下放至所述水下混凝土层4预定位置后,对所述测量杆5顶部施加预定压力。
具体的,履带吊是指具有履带行走装置的全回转动臂架式起重机,起重量大,方便在船上使用,以便地在水体1中进行定位测量设备的放样中进行运用。
为了保证预制独立基础16的角度达到预定范围,提升了可靠性,可选的,在所述预制沉井3井身相邻侧面的预定位置处设置控制点坐标,下沉过程中采用全站仪测量所述测量杆5的基础中心线角度;为了确保测量杆5完全没入水下混凝土层4内部,当预制独立基础16下放至水下混凝土层4预定位置后,对测量杆5顶部施加预定压力。
在一种可能实现的方式中,杆基连体件施工的方式包括:杆基连体件钢柱和预制独立基础16两部分,并采取现场预制,采用履带吊整体吊入预制钢沉井的方式进行安装;水下混凝土层4浇筑完成初凝前,利用履带吊将杆基连体件吊入预制沉井3内;杆基连体件安装过程中通过控制钢柱上提前引入的两相邻侧面的基础中心线的位置控制钢柱的位置和预制独立基础16的角度;杆基连体件吊装前,在预制沉井3顶面划好定位线;杆基连体件完全进入预制沉井3后,将井字架按照预制沉井3上的定位线放置于预制沉井3上,并调整位置;杆基连体件在下沉过程中,采用全站仪测量钢柱上的基础中心线位置以保证预制独立基础16角度;杆基连体件下放至水下混凝土层4后,复测位置,位置无误后利用井字架将钢柱水平位置固定;为确保预制基础与封底混凝土接触紧密,采用预制块放置钢柱顶下压预制独立基础16。
本发明实施例中,通过采用了包括测量杆5体和预制独立基础16的杆基连体件,将独立基础的水下现浇改为与钢柱联合预制,在封底混凝土凝固前通过吊装就位预制独立基础16,通过封底混凝土的凝结完成基础施工。因此,本发明方法创新了水下混凝土独立基础施工的方法,实现了水下混凝土独立基础异位预制和测量杆5体加独立基础整体快速吊装定位,将水下作业面转移至水上工作面,降低了安全风险,保证了基础的施工质量,提高了基础施工效率和钢沉井的周转利用率,整个基础施工过程无人员下井,无沉井抽水施工,从而大大减少基础施工安全风险,有效减少沉井受力而优化沉井用量,也避免现浇基础混凝土的凝固时间。
步骤S305、待所述水下混凝土层4凝固至预定凝固强度后,将所述预制沉井3井身与所述水下混凝土层4分离并拆卸。
优选的,待所述水下混凝土层4凝固至预定凝固强度后,将所述预制沉井3的井身分离并拆卸包括:所述水下混凝土层4采用C35混凝土,所述预定凝固强度为至少75%。
为了使水下混凝土达到预定强度范围同时又兼顾水下凝固性能,可选的,水下混凝土层4采用C35混凝土,以此提升水体1中定位测量设备综合性能,进而提升水体1中进行定位测量设备的放样的可靠性。
在一种可能实现的方式中,为了使水下混凝土凝固得更稳定,避免水体1中定位测量设备发生变形的情况,同时考虑节省工期以及便于封底混凝土迅速脱模的情况,可选的,所述预定凝固强度采用75%以上。
在一个优选的实施例中,当所述测量杆5垂直于水平面时固定所述测量杆5包括:当所述测量杆5垂直于水平面时,采用井字形钢架将所述测量杆5的位置固定。
在水下混凝土层4凝固的过程中,由于潮汐力或施工震动等原因可能导致测量杆5杆身的角度发生偏转,为了避免上述情况,当所述测量杆5垂直于水平面时,采用限位装置将所述测量杆5的位置固定。
在一种可能实现的方式中,当所述测量杆5垂直于水平面时,采用井字形钢架将所述测量杆5的位置固定;在所述井字形钢架的中心部分与所述测量杆5进行焊接,在所述井字形钢架的端点部分与所述预制沉井3上沿四周分别焊接。
本发明实施例中,通过采用井字形钢架对测量杆5的位置固定的方式,可以保证定位测量设备的放样精度和质量,便于采用定位测量仪器对所述预定水域进行测量。
由此可见,本发明实施例中,所述复杂地质环境下的水体中进行定位放样的施工方法,与现有技术相比,至少具备以下技术效果:
第一、通过沉井法将预制沉井3从预定水域底部自然地质层的上表面下沉至目标平面层2上表面,并将测量杆5通过水下混凝土固定连接在目标平面层2的上表面,以此完成水体中定位测量设备的放样。由于当前还没有能够针对如同时包含有沙、石、泥、深部水泥基底或河下隧道层等复杂地质环境的水体中定位测量设备的放样施工方法,传统的水体中定位测量设备放样施工方法适用性不够强,如浮船加振动锤施工法和围堰施工法等不容易实施。因此,本发明实施例提供的方法可以更方便、容易地实现在水体中进行定位测量设备的放样施工,适用性更强;
第二、由于本发明实施例中的水体中进行定位放样的施工方法采用了预制的可拆卸分离式沉井对水体中定位测量设备进行建模,相比传动沉井法、围堰法等方法进行水体中定位测量设备建模,更高效、设备重复利用率高、更经济;
第三、本发明实施例中的方法改进了沉井分离工艺,通过可拆卸分离式结构以及硂隔离层9的设置,使封底混凝土可以迅速脱模,相比传统方法,减少沉井脱模时间,也避免沉井底部因无法脱模而需要预留一节的工程用量,提高沉井的重复利用率,节省了工期。
第四、由于本发明实施例中的水体中进行定位放样的施工方法的采用了可伸缩式测量杆5,用户在测量时不受水体水位变化的影响,因此更加方便,适用性更强;
第五、由于本发明实施例中的水体中进行定位放样的施工方法的采用了遥控可旋转式棱镜装置10,使得用户在采用全站仪进行测量的过程中,可以在远处遥控操作定位测量设备,因此,使用过程更加方便、快捷和高效。
以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。