基于空间微重力条件的磁性颗粒运动轨迹测量系统及方法
文献发布时间:2023-06-19 19:20:08
技术领域
本发明涉及电磁测量和观测技术领域,尤其涉及基于空间微重力条件的磁性颗粒运动轨迹测量系统及方法。
背景技术
颗粒系统是自然界、农业和工业过程中最常见的系统。时刻都在影响着人类的生存和生活环境。大量颗粒所组成的离散态体系可以表现出许多不同于固、液、气体物质的奇特的运动规律。特别是诸如泥石流、雪崩和山体滑坡等自然灾害本质上可归属于颗粒体系失稳而导致的类固-液相变过程。
颗粒物质是大量离散的固体颗粒相互作用而组成的复杂体系,具有多物理机制和多尺度结构层次的特点,许多现象不能用一般的力学和凝聚态物理很好的解释,是物理和力学的前沿领域。在颗粒体系内部,颗粒相互接触形成诸多强度迥异的力链,力链连接成网络,其复杂的动力学响应决定颗粒体系宏观力学性能。
空间微重力环境下颗粒物质运动规律的观测主要有两种方法,其一是相机直接观测法,但这种方式受到光的影响较大,颗粒堆体内部运动规律难以观测;其二是X光机观测法,能够观测堆体内部颗粒运动的规律,但是X光需要功率较大,且设备体积重量大,对于空间平台而言,上行成本及体积难以承受。
因此,亟需提供一种技术方案解决上述技术问题。
发明内容
为解决上述技术问题,本发明提供了一种基于空间微重力条件的磁性颗粒运动轨迹测量系统及方法。
本发明的基于空间微重力条件的磁性颗粒运动轨迹测量系统的技术方案如下:
包括:处理器,以及位于空间端的相互垂直设置的第一多磁测量平面和第二多磁测量平面;所述第一多磁测量平面和所述第二多磁测量平面均设有磁传感器矩阵;所述处理器用于:
当待测磁性颗粒在空间微重力条件下的预设区域内进行运动时,接收所述第一多磁测量平面的每个磁传感器所采集的当前时刻的第一原始磁通密度矢量数据,并接收所述第二多磁测量平面的每个磁传感器所采集的所述当前时刻的第二原始磁通密度矢量数据;
对每个第一原始磁通密度矢量数据分别进行滤波处理,得到多个第一目标磁通密度矢量数据,并对每个第二原始磁通密度矢量数据分别进行滤波处理,得到多个第二目标磁通密度矢量数据;
从所有的第一目标磁通密度矢量数据中确定第一目标磁通密度矢量数据组,并从所有的第二目标磁通密度矢量数据中确定第二目标磁通量密度矢量数据组;
根据所述第一目标磁通密度矢量数据组和所述第二目标磁通量密度矢量数据组进行反演计算,得到所述待测磁性颗粒在所述当前时刻的目标矢量坐标,并将所述当前时刻的下一时刻作为所述当前时刻,并返回执行接收所述第一多磁测量平面的每个磁传感器所采集的当前时刻的第一原始磁通密度矢量数据的步骤,直至得到每一时刻的目标矢量坐标,并根据每一时刻的目标矢量坐标生成所述待测磁性颗粒在所述预设区域内的运动轨迹。
本发明的基于空间微重力条件的磁性颗粒运动轨迹测量系统的有益效果如下:
本发明的系统通过磁测量方式,克服了相机直接观测和X光机观测方法在空间微重力条件下颗粒观测的不足,实现了对空间微重力环境下颗粒物质运动轨迹和规律的精准观测。
在上述方案的基础上,本发明的基于空间微重力条件的磁性颗粒运动轨迹测量系统还可以做如下改进。
进一步,所述处理器具体用于:
当所述待测磁性颗粒在空间微重力条件下的所述预设区域内处于任一振动条件时,接收所述第一多磁测量平面的每个磁传感器所采集的所述当前时刻的第一原始磁通密度矢量数据,并接收所述第二多磁测量平面的每个磁传感器所采集的所述当前时刻的第二原始磁通密度矢量数据;其中,每种振动条件对应一个频率和一个振幅。
进一步,所述处理器还用于:
获取所述任一振动条件下的初始磁通量密度矢量;
所述处理器具体用于:
分别对每个第一原始磁通密度矢量数据中的初始磁通量密度矢量进行滤波处理,得到多个第一目标磁通密度矢量数据,并分别对每个第二原始磁通密度矢量数据中的初始磁通量密度矢量进行滤波处理,得到多个第二目标磁通密度矢量数据。
进一步,所述处理器具体用于:
从所有的第一目标磁通密度矢量数据中选取最优的相近且间距相等四个第一目标磁通密度矢量数据,并将所述最优的相近且间距相等四个第一目标磁通密度矢量数据确定为所述第一目标磁通密度矢量数据组;
从所有的第二目标磁通密度矢量数据中选取最优的相近且间距相等四个第二目标磁通密度矢量数据,并将所述最优的相近且间距相等四个第二目标磁通密度矢量数据确定为所述第二目标磁通密度矢量数据组。
进一步,所述处理器具体用于:
基于磁场梯度张量算法,对所述第一目标磁通密度矢量数据组和所述第二目标磁通量密度矢量数据组进行反演计算,得到所述待测磁性颗粒在所述当前时刻的所述目标矢量坐标。
进一步,所述处理器还用于:
通过显示装置将所述运动轨迹进行显示。
本发明的基于空间微重力条件的磁性颗粒运动轨迹测量方法的技术方案如下:
当待测磁性颗粒在空间微重力条件下的预设区域内进行运动时,处理器接收所述第一多磁测量平面的每个磁传感器所采集的当前时刻的第一原始磁通密度矢量数据,并接收所述第二多磁测量平面的每个磁传感器所采集的所述当前时刻的第二原始磁通密度矢量数据;
所述处理器对每个第一原始磁通密度矢量数据分别进行滤波处理,得到多个第一目标磁通密度矢量数据,并对每个第二原始磁通密度矢量数据分别进行滤波处理,得到多个第二目标磁通密度矢量数据;
所述处理器从所有的第一目标磁通密度矢量数据中确定第一目标磁通密度矢量数据组,并从所有的第二目标磁通密度矢量数据中确定第二目标磁通量密度矢量数据组;
所述处理器根据所述第一目标磁通密度矢量数据组和所述第二目标磁通量密度矢量数据组进行反演计算,得到所述待测磁性颗粒在所述当前时刻的目标矢量坐标,并将所述当前时刻的下一时刻作为所述当前时刻,并返回执行接收所述第一多磁测量平面的每个磁传感器所采集的当前时刻的第一原始磁通密度矢量数据的步骤,直至得到每一时刻的目标矢量坐标,并根据每一时刻的目标矢量坐标生成所述待测磁性颗粒在所述预设区域内的运动轨迹。
本发明的基于空间微重力条件的磁性颗粒运动轨迹测量方法的有益效果如下:
本发明的方法通过磁测量方式,克服了相机直接观测和X光机观测方法在空间微重力条件下颗粒观测的不足,实现了对空间微重力环境下颗粒物质运动轨迹和规律的精准观测。
在上述方案的基础上,本发明的基于空间微重力条件的磁性颗粒运动轨迹测量方法还可以做如下改进。
进一步,所述当待测磁性颗粒在空间微重力条件下的预设区域内进行运动时,所述处理器接收所述第一多磁测量平面的每个磁传感器所采集的当前时刻的第一原始磁通密度矢量数据,并接收所述第二多磁测量平面的每个磁传感器所采集的所述当前时刻的第二原始磁通密度矢量数据的步骤,包括:
当所述待测磁性颗粒在空间微重力条件下的所述预设区域内处于任一振动条件时,所述处理器接收所述第一多磁测量平面的每个磁传感器所采集的所述当前时刻的第一原始磁通密度矢量数据,并接收所述第二多磁测量平面的每个磁传感器所采集的所述当前时刻的第二原始磁通密度矢量数据;其中,每种振动条件对应一个频率和一个振幅。
进一步,还包括:
所述处理器获取所述任一振动条件下的初始磁通量密度矢量;
所述处理器对每个第一原始磁通密度矢量数据分别进行滤波处理,得到多个第一目标磁通密度矢量数据,并对每个第二原始磁通密度矢量数据分别进行滤波处理,得到多个第二目标磁通密度矢量数据的步骤,包括:
所述处理器分别对每个第一原始磁通密度矢量数据中的初始磁通量密度矢量进行滤波处理,得到多个第一目标磁通密度矢量数据,并分别对每个第二原始磁通密度矢量数据中的初始磁通量密度矢量进行滤波处理,得到多个第二目标磁通密度矢量数据。
进一步,所述处理器从所有的第一目标磁通密度矢量数据中确定第一目标磁通密度矢量数据组,并从所有的第二目标磁通密度矢量数据中确定第二目标磁通量密度矢量数据组的步骤,包括:
所述处理器从所有的第一目标磁通密度矢量数据中选取最优的相近且间距相等四个第一目标磁通密度矢量数据,并将所述最优的相近且间距相等四个第一目标磁通密度矢量数据确定为所述第一目标磁通密度矢量数据组;
所述处理器从所有的第二目标磁通密度矢量数据中选取最优的相近且间距相等四个第二目标磁通密度矢量数据,并将所述最优的相近且间距相等四个第二目标磁通密度矢量数据确定为所述第二目标磁通密度矢量数据组。
附图说明
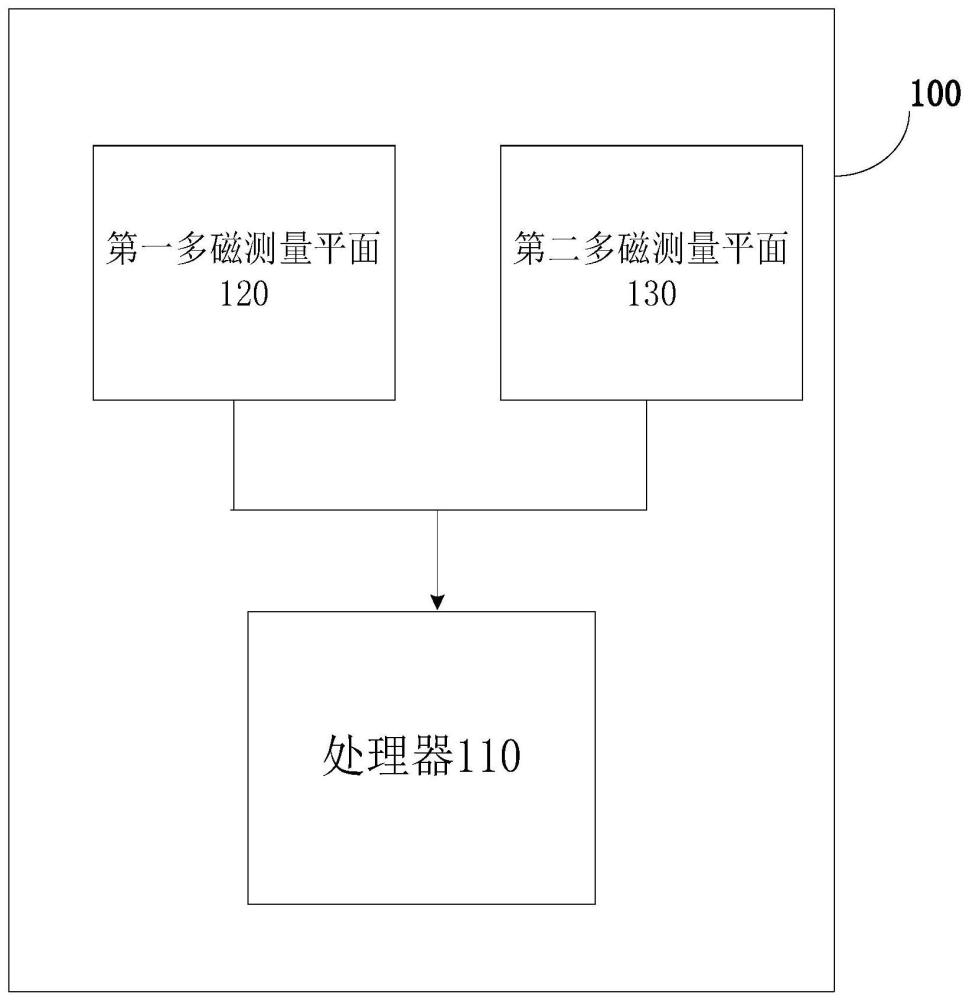
图1示出了本发明提供的基于空间微重力条件的磁性颗粒运动轨迹测量系统的第一实施例的第一结构图;
图2示出了本发明提供的基于空间微重力条件的磁性颗粒运动轨迹测量系统的第一实施例中的多磁测量平面的安装位置图;
图3示出了本发明提供的基于空间微重力条件的磁性颗粒运动轨迹测量系统的第一实施例中的磁梯度张量测量结构的示意图;
图4示出了本发明提供的基于空间微重力条件的磁性颗粒运动轨迹测量系统的第一实施例的第二结构图;
图5示出了本发明提供的基于空间微重力条件的磁性颗粒运动轨迹测量系统的第二实施例的结构图;
图6示出了本发明提供的基于空间微重力条件的磁性颗粒运动轨迹测量方法的实施例的流程图。
具体实施方式
图1示出了本发明提供的基于空间微重力条件的磁性颗粒运动轨迹测量系统的第一实施例的第一结构图。如图1所示,该系统100包括:处理器110,以及位于空间端的相互垂直设置的第一多磁测量平面120和第二多磁测量平面130;所述第一多磁测量平面120和所述第二多磁测量平面130均设有磁传感器矩阵。
其中,①本实施例中的处理器110可设置在地面端,也可设置在空间中的航天器实验柜中(空间端),在此不设限制。②处理器110的数量可以是一个,也可以是多个或多级;当为多个或多级处理器时,部分处理器可设置在地面端,部分处理器可设置在空间端,在此均不设限制。本实施例以一个设置于空间端的处理器为例进行说明。③第一多磁测量平面120与第二多磁测量平面130均由包含多个磁传感器所构成的磁传感器矩阵构成,第一多磁测量平面120和第二多磁测量平面130相互垂直设置,具体的安装位置关系如图2所示。④第一多磁测量平面120与第二多磁测量平面130中的任一多磁测量平面均由m×n个磁传感器以10毫米为间距排列分布在10m(毫米)×10n(毫米)所构成,最终得到m行n列的磁传感器矩阵(m和n均为大于0的正整数)。
需要说明的是,根据图2所示的安装方式,第一多磁测量平面120可以测量xoy平面的磁通密度矢量,第二多磁测量平面130可以测量xoz平面的磁通密度矢量。两个多磁测量平面既可以补偿磁传感器不同方向磁场测量精度不同造成的测量精度误差,又可以增加一个维度磁通密度矢量数据,两个多磁测量平面互为冗余和备份,提高了测量可靠性。此外,本实施例的两个多磁测量平面形成的磁梯度张量测量结构如图3所示。
所述处理器110用于:
当待测磁性颗粒在空间微重力条件下的预设区域内进行运动时,接收所述第一多磁测量平面的每个磁传感器所采集的当前时刻的第一原始磁通密度矢量数据,并接收所述第二多磁测量平面的每个磁传感器所采集的所述当前时刻的第二原始磁通密度矢量数据。
其中,①待测磁性颗粒为:位于空间微重力条件下的预设区域内,且能够被磁传感器所感知的颗粒。②预设区域为:第一多磁测量平面120与其垂直的第二多磁测量平面130围成的长方体区域,待测磁性颗粒在所述长方体区域内部运动,待测磁性颗粒能够被第一多磁测量平面120与第二多磁测量平面130中的每一磁传感器所感知并准确测量。③磁通密度矢量数据为:(Bx,By,Bz)。第一原始磁通密度矢量数据为:第一多磁测量平面120中的任一磁传感器在当前时刻所采集到的磁通密度矢量。第二原始磁通密度矢量数据为:第二多磁测量平面130中的任一磁传感器在当前时刻所采集到的磁通密度矢量。
对每个第一原始磁通密度矢量数据分别进行滤波处理,得到多个第一目标磁通密度矢量数据,并对每个第二原始磁通密度矢量数据分别进行滤波处理,得到多个第二目标磁通密度矢量数据。
其中,①第一目标磁通密度矢量数据为:第一原始磁通密度矢量数据经过滤波处理后所得到的磁通密度矢量数据,每个第一原始磁通密度矢量数据对应一个第一目标磁通密度矢量数据。②第二目标磁通密度矢量数据为:第二原始磁通密度矢量数据经过滤波处理后所得到的磁通密度矢量数据,每个第二原始磁通密度矢量数据对应一个第二目标磁通密度矢量数据。
具体地,分别对每个第一原始磁通密度矢量数据中的初始磁通量密度矢量进行滤波处理,得到多个第一目标磁通密度矢量数据,并分别对每个第二原始磁通密度矢量数据中的初始磁通量密度矢量进行滤波处理,得到多个第二目标磁通密度矢量数据。
其中,初始磁通量密度矢量为:系统100在初始化时所获取的初始背景下的静态磁场分布磁通密度矢量。由于此时待测磁性颗粒未置于预设区域内,即第一多磁测量平面120和第二多磁测量平面130中的每个磁传感器所测量的磁通密度矢量数据均是无磁性颗粒的背景磁通量密度矢量。
从所有的第一目标磁通密度矢量数据中确定第一目标磁通密度矢量数据组,并从所有的第二目标磁通密度矢量数据中确定第二目标磁通量密度矢量数据组。
具体地,从所有的第一目标磁通密度矢量数据中选取最优的相近且间距相等四个第一目标磁通密度矢量数据,并将所述最优的相近且间距相等四个第一目标磁通密度矢量数据确定为所述第一目标磁通密度矢量数据组。从所有的第二目标磁通密度矢量数据中选取最优的相近且间距相等四个第二目标磁通密度矢量数据,并将所述最优的相近且间距相等四个第二目标磁通密度矢量数据确定为所述第二目标磁通密度矢量数据组。
其中,①最优的相近且间距相等四个第一目标磁通密度矢量数据的判断条件为:各个测量点的磁传感器所测量的第一目标磁通密度矢量数值模的和,取相近且间距相等四个测量点的最大值为最优。②最优的相近且间距相等四个第二目标磁通密度矢量数据的判断条件为:各个测量点的磁传感器所测量的第二目标磁通密度矢量数值模的和,取相近且间距相等四个测量点的最大值为最优。
根据所述第一目标磁通密度矢量数据组和所述第二目标磁通量密度矢量数据组进行反演计算,得到所述待测磁性颗粒在所述当前时刻的目标矢量坐标,并将所述当前时刻的下一时刻作为所述当前时刻,并返回执行接收所述第一多磁测量平面的每个磁传感器所采集的当前时刻的第一原始磁通密度矢量数据的步骤,直至得到每一时刻的目标矢量坐标,并根据每一时刻的目标矢量坐标生成所述待测磁性颗粒在所述预设区域内的运动轨迹。
其中,①基于磁场梯度张量算法,对所述第一目标磁通密度矢量数据组和所述第二目标磁通量密度矢量数据组进行反演计算。②采用磁场梯度张量算法进行反演的过程为现有技术,在此不过多赘述。③每一时刻的目标矢量坐标的获取方式均与本实施例中提到的当前时刻的目标矢量坐标的获取方式相同,仅需返回重复执行即可,在此不过多赘述。
较优地,所述处理器110具体用于:
当所述待测磁性颗粒在空间微重力条件下的所述预设区域内处于任一振动条件时,接收所述第一多磁测量平面的每个磁传感器所采集的所述当前时刻的第一原始磁通密度矢量数据,并接收所述第二多磁测量平面的每个磁传感器所采集的所述当前时刻的第二原始磁通密度矢量数据。
其中,每种振动条件对应一个频率和一个振幅;待测磁性颗粒在不同频率和不同振幅下的磁通密度矢量数据不同。因此,可通过调节待测磁性颗粒的频率和振幅来研究待测磁性颗粒在不同振动条件下的运动轨迹。
较优地,所述处理器110还用于:
获取所述任一振动条件下的初始磁通量密度矢量。
其中,任一振动条件下的初始磁通量密度矢量不同。
较优地,所述系统100还包括:显示装置140。
其中,显示装置140可设置在空间端,也可设置在地面端,在此不设限制。
所述处理器110还用于:
通过显示装置140将所述运动轨迹进行显示。
具体地,如图4所示,通过处理器110将待测磁性颗粒的运动轨迹发送至显示装置进行显示。
本实施例的技术方案通过磁测量方式,克服了相机直接观测和X光机观测方法在空间微重力条件下颗粒观测的不足,实现了对空间微重力环境下颗粒物质运动轨迹和规律的精准观测。
图5示出了本发明提供的基于空间微重力条件的磁性颗粒运动轨迹测量系统的第二实施例的结构图。如图5所示,该系统包括:第一处理器210、第二处理器220,以及位于空间端的相互垂直设置的第一多磁测量平面230和第二多磁测量平面240;所述第一多磁测量平面230和所述第二多磁测量平面240均设有磁传感器矩阵。其中,第一处理器210设置在空间端,第二处理器220设置在地面端。
所述第一处理器210用于:
当待测磁性颗粒在空间微重力条件下的预设区域内进行运动时,接收所述第一多磁测量平面230的每个磁传感器所采集的当前时刻的第一原始磁通密度矢量数据,并接收所述第二多磁测量平面240的每个磁传感器所采集的所述当前时刻的第二原始磁通密度矢量数据;
对每个第一原始磁通密度矢量数据分别进行滤波处理,得到多个第一目标磁通密度矢量数据,并对每个第二原始磁通密度矢量数据分别进行滤波处理,得到多个第二目标磁通密度矢量数据;
将所有的第一目标磁通密度矢量数据和所有的第二目标磁通密度矢量数据发送至所述第二处理器220。
所述第二处理器220用于:
从所有的第一目标磁通密度矢量数据中确定第一目标磁通密度矢量数据组,并从所有的第二目标磁通密度矢量数据中确定第二目标磁通量密度矢量数据组。
根据所述第一目标磁通密度矢量数据组和所述第二目标磁通量密度矢量数据组进行反演计算,得到所述待测磁性颗粒在所述当前时刻的目标矢量坐标,并将所述当前时刻的下一时刻作为所述当前时刻,并返回执行接收所述第一多磁测量平面的每个磁传感器所采集的当前时刻的第一原始磁通密度矢量数据的步骤,直至得到每一时刻的目标矢量坐标,并根据每一时刻的目标矢量坐标生成所述待测磁性颗粒在所述预设区域内的运动轨迹。
较优地,所述第一处理器210具体用于:
当所述待测磁性颗粒在空间微重力条件下的所述预设区域内处于任一振动条件时,接收所述第一多磁测量平面的每个磁传感器所采集的所述当前时刻的第一原始磁通密度矢量数据,并接收所述第二多磁测量平面的每个磁传感器所采集的所述当前时刻的第二原始磁通密度矢量数据;其中,每种振动条件对应一个频率和一个振幅。
较优地,所述第一处理器210还用于:
获取所述任一振动条件下的初始磁通量密度矢量;
所述第一处理器210具体用于:
分别对每个第一原始磁通密度矢量数据中的初始磁通量密度矢量进行滤波处理,得到多个第一目标磁通密度矢量数据,并分别对每个第二原始磁通密度矢量数据中的初始磁通量密度矢量进行滤波处理,得到多个第二目标磁通密度矢量数据。
较优地,所述第二处理器210具体用于:
从所有的第一目标磁通密度矢量数据中选取最优的相近且间距相等四个第一目标磁通密度矢量数据,并将所述最优的相近且间距相等四个第一目标磁通密度矢量数据确定为所述第一目标磁通密度矢量数据组;
从所有的第二目标磁通密度矢量数据中选取最优的相近且间距相等四个第二目标磁通密度矢量数据,并将所述最优的相近且间距相等四个第二目标磁通密度矢量数据确定为所述第二目标磁通密度矢量数据组。
较优地,所述第二处理器220具体用于:
基于磁场梯度张量算法,对所述第一目标磁通密度矢量数据组和所述第二目标磁通量密度矢量数据组进行反演计算,得到所述待测磁性颗粒在所述当前时刻的所述目标矢量坐标。
较优地,所述第二处理器220还用于:
通过显示装置250将所述运动轨迹进行显示。
本实施例的技术方案通过磁测量方式,克服了相机直接观测和X光机观测方法在空间微重力条件下颗粒观测的不足,实现了对空间微重力环境下颗粒物质运动轨迹和规律的精准观测。
图6示出了本发明提供的基于空间微重力条件的磁性颗粒运动轨迹测量方法的实施例的流程图,如图6所示,包括如下步骤:
步骤310:当待测磁性颗粒在空间微重力条件下的预设区域内进行运动时,处理器接收所述第一多磁测量平面的每个磁传感器所采集的当前时刻的第一原始磁通密度矢量数据,并接收所述第二多磁测量平面的每个磁传感器所采集的所述当前时刻的第二原始磁通密度矢量数据。
步骤320:所述处理器对每个第一原始磁通密度矢量数据分别进行滤波处理,得到多个第一目标磁通密度矢量数据,并对每个第二原始磁通密度矢量数据分别进行滤波处理,得到多个第二目标磁通密度矢量数据。
步骤330:所述处理器从所有的第一目标磁通密度矢量数据中确定第一目标磁通密度矢量数据组,并从所有的第二目标磁通密度矢量数据中确定第二目标磁通量密度矢量数据组;
步骤340:所述处理器根据所述第一目标磁通密度矢量数据组和所述第二目标磁通量密度矢量数据组进行反演计算,得到所述待测磁性颗粒在所述当前时刻的目标矢量坐标,并将所述当前时刻的下一时刻作为所述当前时刻,并返回执行步骤310,直至得到每一时刻的目标矢量坐标,并根据每一时刻的目标矢量坐标生成所述待测磁性颗粒在所述预设区域内的运动轨迹。
较优地,步骤310具体包括:
当所述待测磁性颗粒在空间微重力条件下的所述预设区域内处于任一振动条件时,所述处理器接收所述第一多磁测量平面的每个磁传感器所采集的所述当前时刻的第一原始磁通密度矢量数据,并接收所述第二多磁测量平面的每个磁传感器所采集的所述当前时刻的第二原始磁通密度矢量数据;其中,每种振动条件对应一个频率和一个振幅。
较优地,还包括:
所述处理器获取所述任一振动条件下的初始磁通量密度矢量;
步骤320具体包括:
所述处理器分别对每个第一原始磁通密度矢量数据中的初始磁通量密度矢量进行滤波处理,得到多个第一目标磁通密度矢量数据,并分别对每个第二原始磁通密度矢量数据中的初始磁通量密度矢量进行滤波处理,得到多个第二目标磁通密度矢量数据。
较优地,步骤330具体包括:
所述处理器从所有的第一目标磁通密度矢量数据中选取最优的相近且间距相等四个第一目标磁通密度矢量数据,并将所述最优的相近且间距相等四个第一目标磁通密度矢量数据确定为所述第一目标磁通密度矢量数据组;
所述处理器从所有的第二目标磁通密度矢量数据中选取最优的相近且间距相等四个第二目标磁通密度矢量数据,并将所述最优的相近且间距相等四个第二目标磁通密度矢量数据确定为所述第二目标磁通密度矢量数据组。
本实施例的技术方案通过磁测量方式,克服了相机直接观测和X光机观测方法在空间微重力条件下颗粒观测的不足,实现了对空间微重力环境下颗粒物质运动轨迹和规律的精准观测。
上述关于本发明提供的基于空间微重力条件的磁性颗粒运动轨迹测量方法的实施例中的各参数和步骤所实现的相应功能,可参考上文中关于本发明提供的基于空间微重力条件的磁性颗粒运动轨迹测量系统的第一实施例中的各参数和模块,在此不做赘述。
在此处所提供的说明书中,说明了大量具体细节。然而能够理解,本发明的实施例可以在没有这些具体细节的情况下实践。类似地,为了精简本发明并帮助理解各个发明方面中的一个或多个,在上面对本发明的示例性实施例的描述中,本发明实施例的各个特征有时被一起分组到单个实施例、图、或者对其的描述中。其中,遵循具体实施方式的权利要求书由此明确地并入该具体实施方式,其中每个权利要求本身都作为本发明的单独实施例。
应该注意的是上述实施例对本发明进行说明而不是对本发明进行限制,并且本领域技术人员在不脱离所附权利要求的范围的情况下可设计出替换实施例。在权利要求中,不应将位于括号之间的任何参考符号构造成对权利要求的限制。单词“包含”不排除存在未列在权利要求中的元件或步骤。位于元件之前的单词“一”或“一个”不排除存在多个这样的元件。本发明可以借助于包括有若干不同元件的硬件以及借助于适当编程的计算机来实现。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。单词第一、第二、以及第三等的使用不表示任何顺序。可将这些单词解释为名称。上述实施例中的步骤,除有特殊说明外,不应理解为对执行顺序的限定。