一种脱硝管道除垢机器人
文献发布时间:2023-06-19 19:21:53
技术领域
本发明涉及管道除垢技术领域,具体为一种脱硝管道除垢机器人。
背景技术
对于管道的污垢清理,现存有很多清理方式,不同管道对应的污垢清理方式也不尽相同。生活及其城市用管的清理大多以人力疏通为主,也有少部分采用对应机器人或辅助工具进行管道的清理。在当下的工业管道群体中,对应管道的污垢清理就相对比较复杂,现存的工业管道内污垢清理方法主要以化学药剂法和人工振击为主,所谓化学药剂法就是通过相应化学药剂的配合,通过相应的酸碱中和反应和腐蚀来对管道内污垢进行清理,而人工振击则是通过人为敲击管道通过振动将管道内污垢震落,随后再将震落的污垢从管道内冲洗出来。
现存的工业管道污垢清理的方式所存在的弊端比较多,化学药剂的配比不准确将会导致管道内污垢清理不干净或者是使得管道内壁遭遇不必要的化学腐蚀,从而缩短管道使用寿命,而采用人工进行管道内污垢的清理不仅费时费力还影响生产,人工的清理的过程过于繁琐,效率也相对较低。
基于此,本发明设计了一种脱硝管道除垢机器人以解决上述问题。
发明内容
本发明的目的在于提供一种脱硝管道除垢机器人,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种脱硝管道除垢机器人,包括管道机器人框架,行进组件,支撑组件,支路管道除垢组件,传感器组件,主管道除垢组件,主管道吹灰组件,电路板支板,行进组件安装在管道机器人框架下方且有两组,用以提供前进和后退的动力;支撑组件装配在管道机器人框架上方且有四组两两对称分布,使得管道机器人在管道内稳定行走;支路管道除垢组件位于管道机器人框架内中间部分;传感器组件安装在管道机器人框架前端;主管道除垢组件与主管道吹灰组件装配在管道机器人框架的前端,且主管道除垢组件在前,主管道吹灰组件在后。
优选的,管道机器人框架包括前框架圈,中框架圈,后框架圈,长支架板;前框架圈、中框架圈和后框架圈用长支架板连接在一起形成管道机器人的外框架,同时长支架板还有支撑固定的作用。
优选的,行进组件包括前行进组件和后行进组件,前行进组件包括主动轮、主动电机、电机支撑架;前行进组件与后行进组件均安装在管道机器人框架的下方并且二者结构相同,同时为管道机器人的前进和后退提供动力,主动电机通过外部电源进行供电。
优选的,支撑组件包括支撑轮,支撑短杆,支撑长杆,支撑座,弹簧滑动组件;弹簧滑动组件包括滑动长杆,滑动座和滑动弹簧;支撑组件共有相同的四组,两两位于管道机器人的左上方与右上方,呈对称分布;滑动弹簧推动滑动座为支撑杆提供支撑力,通过支撑轮将管道机器人支撑在管道内,使管道机器人在管道内稳定地进行工作。
优选的,支路管道除垢组件包括Y形管,直角弯管,喷头,扇形转盘,转动轴承;直角弯管与水路管道进行连接,Y形管连接一个直角弯管和两个喷头并一同固定在扇形转盘上对脱硝管道支管进行污垢清理;喷头中所喷出的液体具有一定的流速,对支管内污垢具有冲洗的作用;两个喷头与转动轴承间夹角为120°,扇形转盘上焊接有配重块,使得在管道机器人出现轻微倾斜时两个喷头能够始终指向管道支管。
优选的,传感器组件包括接近传感器,传感器座;传感器座安装于前框架圈上且左下方与右下方各一个,接近传感器用于检测金属支管。
优选的,主管道除垢组件包括破碎桨叶,污垢刷盘,除垢电机,连接转动轴;破碎桨叶位于污垢刷盘的前端且破碎桨叶最大外径小于管道内径,二者皆由除垢电机带动进行除垢工作,破碎桨叶用于将管道内凸起污垢块的破碎,污垢刷盘主要用于附着在管道内壁的污垢薄层的刷洗。
优选的,主管道吹灰组件包括气孔盘,气孔连接口,气腔盘;气孔盘上打有大小相同且分布均匀的小气孔,压力气体通过小气孔将管道机器人前方污垢刷盘洗刷下来的污垢碎末往前吹赶;气腔盘内含有气体空腔,其上方含有两个进气口,气孔连接口一端与进气口进行连接,另一端与压力气路管道连接,压力气体通过气孔连接口进入气腔盘内空腔后均匀地从气孔盘上小气孔吹出,将管道机器人前方污垢刷盘洗刷下来的污垢碎末往前吹赶。
一种脱硝管道除垢机器人的使用方法,包括以下步骤:
S101:管道机器人的直角弯管与压力液路管道进行连接,气孔连接口与压力气路管道进行连接,并进行气路和液路管道的通畅性检查。
S102:将管道机器人放入相关脱硝管道内后,主动轮、支撑轮和污垢刷盘的外围与管道内壁接触,主动轮与支撑轮呈倒三角分布,在主动轮的前进动力和支撑轮的辅助下管道机器人缓缓向前行走。
S103:在管道机器人向前行走的同时,除垢电机开始工作,带动破碎桨叶和污垢刷盘进行转动,同时气孔盘上的小气孔也开始吹气。
S104:在主管道进行除垢时,当管道机器人行进到支管时接近传感器检测到支管时,管道机器人会继续向前行进一小段距离使得喷头对准支管口,这一小段距离为接近传感器与喷头间的距离,然后停留片刻进行支管内污垢的冲洗,冲洗完毕后管道机器人继续向前行进,通过接近传感器和对主动电机的控制,可以使得喷头准确地对准支管口,从而进行支管内污垢的冲洗工作。
优选的,S104后,当支管冲洗后管道机器人继续向前行进,此时管道机器人重复S103、S104。
与现有技术相比,本发明的有益效果是:
1、本发明将管道机器人与桨叶和刷盘除垢方式进行结合,使得相关管径较小的脱硝管道内的污垢清理得以实现。
2、脱硝管道除垢机器人的使用不仅对管道内污垢进行了清理,同时还把对管道造成的损伤降到了最低,与此同时,对于主管道附带支管内的污垢,此管道机器人也能一同进行清理,减少了火电厂对于管道清理的一些不必要的投入。
当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
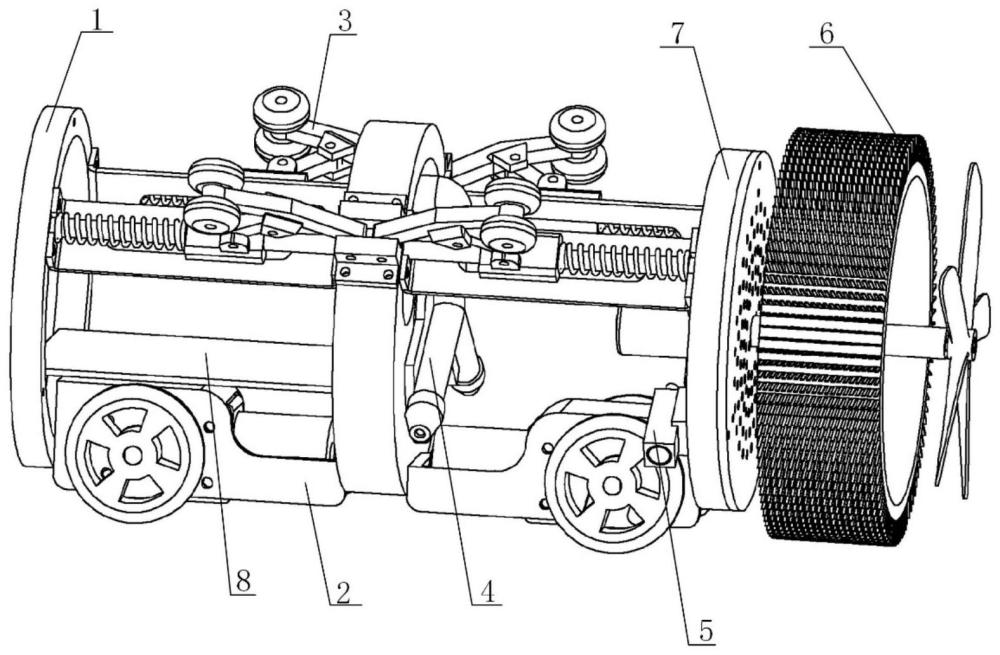
图1为本发明的整体结构图;
图2为本发明的机器人框架组装图;
图3为本发明的行进组件组装图;
图4为本发明的支撑组件组装图;
图5为本发明的支路管道除垢组件组装图;
图6为本发明的传感器组件装配图;
图7为本发明的主管道除垢组件组装图;
图8为本发明的主管道吹灰组件组装图。
图中:1、管道机器人框架;2、行进组件;3、支撑组件;4、支路管道除垢组件;5、传感器组件;6、主管道除垢组件;7、主管道吹灰组件;8、电路板支板;11、前框架圈;12、中框架圈;13、后框架圈;14、长支架板;21、前行进组件;22、后行进组件;211、主动轮;212、主动电机;213、电机支撑架;31、支撑轮;32、支撑短杆;33、支撑长杆;34、支撑座;35、弹簧滑动组件;351、滑动长杆;352、滑动座;353、滑动弹簧;41、Y形管;42、直角弯管;43、喷头;44、扇形转盘;45、转动轴承;51、接近传感器;52、传感器座;61、破碎桨叶;62、污垢刷盘;63、除垢电机;64、连接转动轴;71、气孔盘;72、气孔连接口;73、气腔盘。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例1
请参阅图1至图8,本发明提供一种脱硝管道除垢机器人技术方案:一种脱硝管道除垢机器人,包括管道机器人框架1,行进组件2,支撑组件3,支路管道除垢组件4,传感器组件5,主管道除垢组件6,主管道吹灰组件7,电路板支板8,行进组件2安装在管道机器人框架1下方且有两组,用以提供前进和后退的动力;支撑组件3装配在管道机器人框架1上方且有四组两两对称分布,使得管道机器人在管道内稳定行走;支路管道除垢组件4位于管道机器人框架1内中间部分;传感器组件5安装在管道机器人框架1前端;主管道除垢组件6与主管道吹灰组件7装配在管道机器人框架1的前端,且主管道除垢组件6在前,主管道吹灰组件7在后。
管道除垢机器人从相关脱硝管道的一端驶进,并沿着管道向前行走,一边前进一边对主管道进行污垢的清理,在到达管道支管位置时,管道机器人停止前进并开始对管道支管内污垢进行清理,待该支管清理完毕后管道机器人继续向前清理主管道内污垢。
管道机器人框架1包括前框架圈11,中框架圈12,后框架圈13,长支架板14;前框架圈11、中框架圈12和后框架圈13用长支架板14连接在一起形成管道机器人的外框架,同时长支架板14还有支撑固定的作用。
行进组件2包括前行进组件21和后行进组件22,前行进组件包括主动轮211、主动电机212、电机支撑架213;前行进组件21与后行进组件22均安装在管道机器人框架1的下方并且二者结构相同,同时为管道机器人的前进和后退提供动力,主动电机通过外部电源进行供电。
参阅图3-4,支撑组件3包括支撑轮31,支撑短杆32,支撑长杆33,支撑座34,弹簧滑动组件35;弹簧滑动组件35包括滑动长杆351,滑动座352和滑动弹簧353;支撑组件3共有相同的四组,两两位于管道机器人的左上方与右上方,呈对称分布;
支撑轮31和主动轮211与管道内壁贴合,主动轮211通过主动电机212提供前进动力,支撑轮31通过弹簧滑动组件35与支撑杆的共同作用下提供支撑力,滑动弹簧353推动滑动座352为支撑杆提供支撑力,通过支撑轮31将管道机器人支撑在管道内,使得管道机器人能够在管道内行走的轨迹不发生改变,从而稳定地进行工作。
参阅图5-6,支路管道除垢组件4包括Y形管41,直角弯管42,喷头43,扇形转盘44,转动轴承45;直角弯管42与水路管道进行连接,Y形管41连接一个直角弯管42和两个喷头43并一同固定在扇形转盘44上对脱硝管道支管进行污垢清理;喷头43中所喷出的液体具有一定的流速,对支管内污垢具有冲洗的作用;两个喷头43与转动轴承45间夹角为120°,扇形转盘44上焊接有配重块,使得在管道机器人出现轻微倾斜时两个喷头43能够始终指向管道支管。
传感器组件5包括接近传感器51,传感器座52;传感器座52安装于前框架圈11上且左下方与右下方各一个,接近传感器51用于检测金属支管。
直角弯管42与外部的压力液体管道连接,当接近传感器51感应到支管后,管道机器人会在相应的支管位置停下片刻进行支管内污垢的清理,支管清洗液体从喷头43喷出,具有一定的冲洗力,扇形转盘44则负责保证两个喷头43相对于支管管口的位置不发生改变,并且在扇形转盘44上焊接有配重块。
参阅图7-8,主管道除垢组件6包括破碎桨叶61,污垢刷盘62,除垢电机63,连接转动轴64;破碎桨叶61位于污垢刷盘62的前端且破碎桨叶61最大外径小于管道内径,二者皆由除垢电机63带动进行除垢工作,破碎桨叶61用于将管道内凸起污垢块的破碎,污垢刷盘62主要用于附着在管道内壁的污垢薄层的刷洗。
主管道吹灰组件7包括气孔盘71,气孔连接口72,气腔盘73;气孔盘71上打有大小相同且分布均匀的小气孔,压力气体通过小气孔将管道机器人前方污垢刷盘62洗刷下来的污垢碎末往前吹赶;气腔盘73内含有气体空腔,其上方含有两个进气口,气孔连接口72一端与进气口进行连接,另一端与压力气路管道连接,压力气体通过气孔连接口72进入气腔盘内空腔后均匀地从气孔盘71上小气孔吹出,将管道机器人前方污垢刷盘洗刷下来的污垢碎末往前吹赶。
污垢刷盘62外围与主管道内壁贴合,破碎桨叶61的最大外径则小于主管内径,以保证不对管道内壁和支管在主管道里的突起造成损伤,在除垢电机63的带动下,污垢刷盘62与破碎桨叶61对主管道内污垢进行清理;气孔连接口72与外部压力气路管道相连接,压力气体通过气孔盘73上小气孔吹出,对主管道上的污垢碎末进行吹赶。
一种脱硝管道除垢机器人的使用方法,包括以下步骤:
S101:管道机器人的直角弯管42与压力液路管道进行连接,气孔连接口72与压力气路管道进行连接,并进行气路和液路管道的通畅性检查。
S102:将管道机器人放入相关脱硝管道内后,主动轮211、支撑轮31和污垢刷盘62的外围与管道内壁接触,主动轮211与支撑轮31呈倒三角分布,在主动轮211的前进动力和支撑轮31的辅助下管道机器人缓缓向前行走。
S103:在管道机器人向前行走的同时,除垢电机63开始工作,带动破碎桨叶61和污垢刷盘62进行转动,同时气孔盘71上的小气孔也开始吹气。
S104:在主管道进行除垢时,当管道机器人行进到支管时接近传感器51检测到支管时,管道机器人会继续向前行进一小段距离使得喷头43对准支管口,这一小段距离为接近传感器51与喷头43间的距离,然后停留片刻进行支管内污垢的冲洗,冲洗完毕后管道机器人继续向前行进,通过接近传感器和对主动电机的控制,可以使得喷头准确地对准支管口,从而进行支管内污垢的冲洗工作。
S104后,当支管冲洗后管道机器人继续向前行进,此时管道机器人重复S103、S104。
本实施例的一个具体应用为:脱硝管道的喷氨管道管径小且带有支管,人工清理起来过于麻烦,将该管道机器人连接好气路管道和液路管道后规范放入脱硝管道的端口处,此时,打开管道机器人工作开关,除垢电机开始工作,带动破碎桨叶和污垢刷盘转动,与此同时,气路管道输出压力气体从气孔盘中吹出,稍后主动电机工作带动整个管道机器人向前行进,在行进过程中,管道内壁上的污垢不断地被清理下来并往前吹赶,当管道机器人行进到管道支管处时,除垢电机转动速度减缓,主动电机停止工作,液路管道中压力液体开始从喷头喷出,对支路管道内污垢进行冲洗,冲洗过后喷头停止喷出冲洗压力液体,除垢电机和主动电机恢复正常继续开始污垢清理,本发明将管道机器人与桨叶和刷盘除垢方式进行结合,使得相关管径较小的脱硝管道内的污垢清理得以实现,脱硝管道除垢机器人的使用不仅对管道内污垢进行了清理,同时还把对管道造成的损伤降到了最低,与此同时,对于主管道附带支管内的污垢,此管道机器人也能一同进行清理,减少了火电厂对于管道清理的一些不必要的投入。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。