一种便携式无人机自动巡检平台
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及电力系统检测技术领域,具体的说是一种便携式无人机自动巡检平台。
背景技术
预计到2020年,国家电网110kV及以上架空输电线路长度将达129万公里。传统人工巡检存在巡检效率低、巡检质量不稳定、危险性高、劳动强度大等缺点。国网公司输电线路运检队伍持续存在总量缺员和结构性缺员并存的严峻局面,目前架空线路运检人员缺员率达47%,输电运检人员储备严重不足,“断档”问题突出,设备规模持续增长与巡检人员相对不足之间的矛盾日益突出。另外传统人工巡视作业难以满足电网运维需求,受地形条件、环境因素、人员素质等多方面因素制约,存在巡检困难、巡视范围不全面、巡检效率低等问题,难以适应设备精益化管理和电网高质量发展需求。
近年来,无人机巡检已成为输电线路的重要巡检手段,巡检效益和质量较传统人工巡检有显著提高。但现有的无人机巡检需要安装无人机起飞台,以保障无人机正常飞行,但无人机起飞台安装时往往会受到地形条件、环境因素的影响,且固定式,难以移动,导致无人机巡检难以实行,同时,现有的无人机没有配套的专门的集中换电池系统,一次只能完成一架无人机换电池工作,换电池效率低。
发明内容
本发明要解决的技术问题是提供一种便携式无人机自动巡检平台,能够解决多台无人机高效自动化集中换电池的技术问题。
为解决上述技术问题,本发明采用的技术方案为:
一种便携式无人机自动巡检平台,包括拖车,所述的拖车底部设置有车厢底板,其特征在于:所述的车厢底板的上表面两侧设置有竖直向上延伸的放置架,每组放置架的上部为阵列分布的无人机仓,下部为电池仓组件,两组放置架之间安装有换电机械手,所述的换电机械手可移动的安装在车厢底板上表面,所述的换电机械手能够沿放置架的长度方向移动;
所述的无人机仓内用于放置无人机,所述的电池仓组件包括电池舱和充电模块,所述的电池舱用于放置机载电池,所述的充电模块用于为机载电池充电,所述的换电机械手端部设置有抓手单元,所述的换电机械手用于通过抓手单元抓取机载电池实现无人机的换电操作。
所述的拖车内设有骨架,所述的放置架与骨架固定连接,所述的骨架用于实现对放置架的固定,所述的骨架的底部与底座固定连接,所述的底座与车厢底板对位固定连接,所述的放置架包括竖直设置的若干根立柱,若干根立柱沿骨架的长度方向均匀分布,所述的立柱穿过若干片横板,相邻横板之间相互平行且间隔设置;
所述的无人机仓内设置有无人机座,所述的无人机座用于对无人机进行限位,所述的无人机座固定安装在横板的上表面。
所述的无人机包括无人机支撑脚、无人机机体及机载电池,所述的无人机支撑脚与无人机机体的底部固定连接,所述的无人机支撑脚与无人机座可分离安装,所述的机载电池在无人机支撑脚与无人机座连接时朝向换电机械手一侧。
所述的电池仓组件包括电池仓框架,所述的电池仓框架内阵列设置有若干个电池舱,每组电池舱内安装有可水平滑动的电池托盘,所述的电池托盘顶端设有开口,用于作为机载电池的插入口,所述的电池托盘尾端中部设置有通孔,用于作为充电模块与机载电池的连接口,所述的电池托盘尾端两侧分别与电池托盘推杆端部接触连接,所述的电池托盘推杆为弹性杆,所述的电池托盘推杆处于压缩状态,所述的电池舱的开口两侧设置有电池卡扣,所述的电池卡扣用于在电池托盘完全滑入电池舱内部时对电池托盘进行限位。
所述的电池卡扣包括锁扣壳体,所述的锁扣壳体固定安装在电池舱的开口两侧,所述的锁扣壳体内设置有可滑动的锁扣按钮,所述的锁扣按钮的滑动方向与电池托盘的滑动方向平行,所述的锁扣按钮一端穿过锁扣壳体向外延伸,锁扣按钮另一端与按钮复位弹簧连接,所述的锁扣按钮与按钮复位弹簧连接端向外侧延伸且与锁扣板尾端传动连接,所述的锁扣板中部设置有转销,所述的锁扣板用于以转销为中心实现转动,锁扣板顶端穿过锁扣壳体形成钩状结构,所述的锁扣板顶端用于对电池托盘边缘可分离连接,所述的锁扣按钮与锁扣板的接触面为楔形面,所述的锁扣板尾端与锁扣板复位弹簧连接,所述的锁扣按钮向锁扣壳体内部滑动时能够推动锁扣板转动使锁扣板顶端与电池托盘边缘脱离。
所述的电池舱远离换电机械手一侧设置有背板组件,所述的背板组件包括背板,所述的背板上设置有与电池舱一一对应的充电模块,所述的充电模块的充电插头用于在电池托盘完全滑入电池舱内部时穿过电池托盘尾端通孔为机载电池充电。
所述的换电机械手包括机械手底座,所述的机械手底座的底部设置有底座滑块,所述的底座滑块与导轨滑动连接,所述的机械手底座底部安装有平移驱动齿轮,所述的平移驱动齿轮与平移驱动电机的输出轴传动连接,所述的平移驱动电机固定安装在机械手底座内,所述的平移驱动齿轮与驱动齿条啮合传动,所述的驱动齿条和导轨的延伸方向均与放置架的长度方向平行,所述的驱动齿条和导轨固定安装在底座的上表面。
所述的机械手底座的顶部端面安装有机械手臂,所述的机械手臂包括顺次连接的回转一轴、第二轴、第三轴、第四轴、回转二轴和抓手单元;
所述的回转一轴用于带动第二轴沿回转一轴轴向转动;
所述的第二轴与回转一轴在竖直平面内可转动转连接;
所述的第三轴与第二轴在竖直平面内可转动转连接;
所述的第四轴与第三轴可转动连接,所述的第四轴沿第四轴轴向转动;
所述的回转二轴与第四轴在同一平面内可转动转连接;
所述的回转二轴与抓手单元在同一平面内可转动转连接,所述的回转二轴用于带动抓手单元沿回转二轴轴向转动。
所述的抓手单元包括控制电机和两组夹爪,所述的控制电机用于带动两组夹爪相对运动或相向运动。
该种便携式无人机自动巡检平台能够产生的有益效果为:第一,通过在拖车内设置无人机仓和电池仓,阵列批量存放无人机和无人机电机组,方便机械臂对电池组进行存取并对无人机进行电池更换;第二,机械臂可滑动的安装在导轨上,扩大了机械臂的适用范围,能够在长度方向上覆盖整个矩形无机仓和电池仓,进一步的,通过设置由回转一轴、第二轴、第三轴、第四轴和回转二轴组成的机械臂,保证了机械臂行程能够在高度方向对全部无机仓和电池仓实现覆盖,其中,回转一轴的设置能够控制机械臂的工作朝向,多组翻转轴能够控制机械臂的前伸长度,至少两组的翻转轴同时也保证了抓手单元能够在夹取电池组时能够处于水平状态。第三,该种便携式无人机自动巡检平台能够实现多层多机位的无人机实现抓取电池,更换新电池以及电源集中管理,适合大型无人机表演、农业自动化、军事演习等。
附图说明
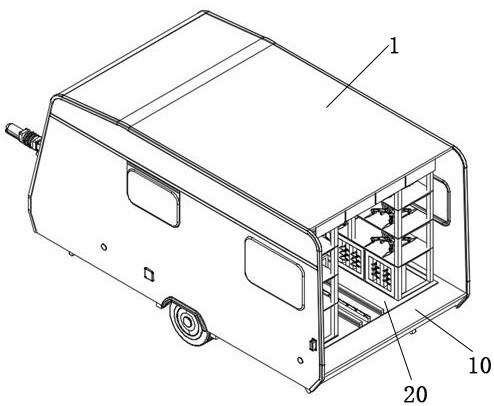
图1为本发明一种便携式无人机自动巡检平台的结构示意图。
图2为本发明一种便携式无人机自动巡检平台的侧视图。
图3为本发明一种便携式无人机自动巡检平台的无人机仓和电池仓组件结构分布图。
图4为本发明一种便携式无人机自动巡检平台中换电机械手的结构示意图。
图5为本发明一种便携式无人机自动巡检平台中无人机仓的结构示意图。
图6为本发明一种便携式无人机自动巡检平台中骨架的结构示意图。
图7为本发明一种便携式无人机自动巡检平台中导轨和驱动齿条的位置示意图。
图8为本发明一种便携式无人机自动巡检平台中机械手臂的结构示意图。
图9为本发明一种便携式无人机自动巡检平台中第三轴的传动示意图。
图10为本发明一种便携式无人机自动巡检平台中抓手单元的结构示意图。
图11为本发明一种便携式无人机自动巡检平台中电池仓的结构示意图。
图12为本发明一种便携式无人机自动巡检平台中电池卡扣的结构示意图。
图13为本发明一种便携式无人机自动巡检平台中电池卡扣的位置示意图。
图14为本发明一种便携式无人机自动巡检平台中电池卡扣局部放大图。
图15为本发明一种便携式无人机自动巡检平台中背板组件的结构示意图。
说明书附图标记:1、拖车;2、骨架;3、换电机械手;4、无人机仓;5、电池仓组件;
10、车厢底板;20、底座;21、 放置架;210、立柱;211、横板;212、无人机座;22、导轨;23、驱动齿条;30、机械手底座;301、底座滑块;31、平移驱动电机;32、平移驱动齿轮;33、机械手臂;330、回转一轴;331、第二轴;332、第三轴;333、第四轴;334、回转二轴;34、抓手单元;340、夹爪;40、无人机支撑脚;41、无人机机体;42、机载电池;50、电池仓框架;51、电池托盘;52、电池舱;53、电池卡扣;530、锁扣壳体;531、锁扣板;532、锁扣按钮;533、按钮复位弹簧;534、锁扣板复位弹簧;54、背板组件;540、背板;541、充电模块;543、电池托盘推杆;3301、固定转轴;3302、旋转基座;3303、第一旋转电机;3311、第一翻转电机;3321、第二翻转电机;3322、转动轴;3323、延伸板;3324、传动板;3331、第一旋转轴;3332、第二旋转电机;3333、第一传送带;3334、第三翻转电机;3335、第二传送带;3341、第三旋转电机;3342、第二旋转轴;3343、固定叉;3344、第四翻转电机;341、控制电机;3401、驱动臂;3402、驱动齿轮;3403、限位臂。
具体实施方式
以下结合说明书附图和具体优选的实施例对本发明作进一步描述。
如图1、图2和图6所示,一种便携式无人机自动巡检平台,包括拖车1,所述的拖车1底部设置有车厢底板10,其特征在于:所述的车厢底板10的上表面两侧设置有竖直向上延伸的放置架21,每组放置架21的上部为阵列分布的无人机仓4,下部为电池仓组件5,两组放置架21之间安装有换电机械手3,所述的换电机械手3可移动的安装在车厢底板10上表面,所述的换电机械手3能够沿放置架21的长度方向移动;
所述的无人机仓4内用于放置无人机,所述的电池仓组件5包括电池舱52和充电模块541,所述的电池舱52用于放置机载电池42,所述的充电模块541用于为机载电池42充电,所述的换电机械手3端部设置有抓手单元34,所述的换电机械手3用于通过抓手单元34抓取机载电池42实现无人机的换电操作。所述的抓手单元34通过抓取机载电池42在无人机电池仓和电池舱52之间进行位置调整进而实现无人机的换电操作。
本实施例拖车1内部结构如图6所示,拖车1内设有骨架2,所述的放置架21与骨架2固定连接,所述的骨架2用于实现对放置架21的固定,所述的骨架2的底部与底座20固定连接,所述的底座20与车厢底板10对位固定连接,所述的放置架21包括竖直设置的若干根立柱210,若干根立柱210沿骨架2的长度方向均匀分布,所述的立柱210穿过若干片横板211,相邻横板211之间相互平行且间隔设置;所述的无人机仓4内设置有无人机座212,所述的无人机座212用于对无人机进行限位,所述的无人机座212固定安装在横板211的上表面。相邻两立柱210之间的横板用于放置无人机进而形成无人机仓4,放置架21的下方用于放置电池仓组件5,根据无人机数量和机载电池42的大小确定电池仓组件5在放置架21底部空间的大小,一般情况下无人机仓4和电池仓组件5的分布情况如图3所示。
本实施例中,如图5所示,无人机包括无人机支撑脚40、无人机机体41及机载电池42,所述的无人机支撑脚40与无人机机体41的底部固定连接,所述的无人机支撑脚40与无人机座212可分离安装,所述的机载电池42在无人机支撑脚40与无人机座212连接时朝向换电机械手3一侧。机载电池42朝向换电机械手3一侧方便换电机械手3直接夹取机载电池42。
本实施例中,如图11所示,电池仓组件5包括电池仓框架50,所述的电池仓框架50内阵列设置有若干个电池舱52,每组电池舱52内安装有可水平滑动的电池托盘51,所述的电池托盘51顶端设有开口,用于作为机载电池42的插入口,所述的电池托盘51尾端中部设置有通孔,用于作为充电模块541与机载电池42的连接口,所述的电池托盘51尾端两侧分别与电池托盘推杆543端部接触连接,所述的电池托盘推杆543为弹性杆,所述的电池托盘推杆543处于压缩状态,所述的电池舱52的开口两侧设置有电池卡扣53,所述的电池卡扣53用于在电池托盘51完全滑入电池舱52内部时对电池托盘51进行限位。
工作时,电池舱52作为容纳机载电池42的空间,在换电机械手3的推动下,机载电池42完全嵌入电池托盘51内,电池卡扣53弹出,卡住机载电池42边缘,完成对机载电池42的限位,此时,电池托盘推杆543处于压缩状态,充电模块541穿过电池托盘51尾端通孔与机载电池42连接,进行充电。当需要取出电池时,电池卡扣53在换电机械手3的推动下打开,位于电池舱52内的电池在电池托盘推杆543的作用下弹出。
本实施例中,如图12、13、14所示,电池卡扣53包括锁扣壳体530,所述的锁扣壳体530固定安装在电池舱52的开口两侧,所述的锁扣壳体530内设置有可滑动的锁扣按钮532,所述的锁扣按钮532的滑动方向与电池托盘51的滑动方向平行,所述的锁扣按钮532一端穿过锁扣壳体530向外延伸,锁扣按钮532另一端与按钮复位弹簧533连接,所述的锁扣按钮532与按钮复位弹簧533连接端向外侧延伸且与锁扣板531尾端传动连接,所述的锁扣板531中部设置有转销,所述的锁扣板531用于以转销为中心实现转动,锁扣板531顶端穿过锁扣壳体530形成钩状结构,所述的锁扣板531顶端用于对电池托盘51边缘可分离连接,所述的锁扣按钮532与锁扣板531的接触面为楔形面,所述的锁扣板531尾端与锁扣板复位弹簧534连接,所述的锁扣板复位弹簧534的延伸方向为锁扣板531运动方向的切向,所述的锁扣按钮532向锁扣壳体530内部滑动时能够推动锁扣板531转动使锁扣板531顶端与电池托盘51边缘脱离。
本实施例中,如图15所示,电池舱52远离换电机械手3一侧设置有背板组件54,所述的背板组件54包括背板540,所述的背板540上设置有与电池舱52一一对应的充电模块541,所述的电池托盘推杆543设置在充电模块541的两侧,所述的充电模块541的充电插头用于在电池托盘51完全滑入电池舱52内部时穿过电池托盘51尾端通孔为机载电池42充电。
本实施例中,如图4和图7所示,换电机械手3包括机械手底座30,所述的机械手底座30的底部设置有底座滑块301,所述的底座滑块301与导轨22滑动连接,所述的机械手底座30底部安装有平移驱动齿轮32,所述的平移驱动齿轮32与平移驱动电机31的输出轴传动连接,所述的平移驱动电机31固定安装在机械手底座30内,所述的平移驱动齿轮32与驱动齿条23啮合传动,所述的驱动齿条23和导轨22的延伸方向均与放置架21的长度方向平行,所述的驱动齿条23和导轨22固定安装在底座20的上表面。通过平移驱动电机31控制平移驱动齿轮32的转速和转向,进而控制换电机械手3的移动方向和移动速度。
本实施例中,如图8和图9所示,机械手底座30的顶部端面安装有机械手臂33,所述的机械手臂33包括顺次连接的回转一轴330、第二轴331、第三轴332、第四轴333、回转二轴334和抓手单元34;所述的回转一轴330用于带动第二轴331沿回转一轴330轴向转动;所述的第二轴331与回转一轴330在竖直平面内可转动转连接;所述的第三轴332与第二轴331在竖直平面内可转动转连接;所述的第四轴333与第三轴332可转动连接,所述的第四轴333沿第四轴333轴向转动;所述的回转二轴334与第四轴333在同一平面内可转动转连接;所述的回转二轴334与抓手单元34在同一平面内可转动转连接,所述的回转二轴334用于带动抓手单元34沿回转二轴334轴向转动。
进一步的,回转一轴330包括固定转轴3301,所述的固定转轴3301的底端固定安装在机械手底座30上表面,所述的固定转轴3301顶端与旋转基座3302可转动连接,所述的旋转基座3302与第一旋转电机3303传动连接,所述的第一旋转电机3303用于驱动旋转基座3302相对固定转轴3301转动;所述的第二轴331竖直设置,所述的第二轴331一端与旋转基座3302可转动连接,所述的第二轴331一端与第一翻转电机3311传动连接,所述的第一翻转电机3311用于驱动第二轴331相对旋转基座3302转动,所述的第二轴331另一端与第三轴332中部可转动连接,所述的第三轴332水平设置,所述的第三轴332一端与第二翻转电机3321传动连接,第三轴332另一端与第四轴333可转动连接,所述的第四轴333靠近第三轴332一端与第一旋转轴3331一端固定连接,第一旋转轴3331另一端通过第一传送带3333与第二旋转电机3332输出轴传动连接,所述的第二旋转电机3332通过第一传送带3333带动第一旋转轴3331转动,进而带动第四轴333沿轴向转动,所述的第四轴333远离第三轴332一端与回转二轴334一端可转动连接,所述的回转二轴334另一端安装有可轴向转动的第二旋转轴3342,所述的第二旋转轴3342一端与第三旋转电机3341输出轴传动连接,第二旋转轴3342另一端与固定叉3343固定连接,所述的固定叉3343端部安装有第四翻转电机3344,所述的第四翻转电机3344用于带动抓手单元34实现翻转。
进一步的,如图9所示,第三轴332远离第四轴333一侧向外延伸形成延伸板3323,所述的延伸板3323端部与传动轴3322一端铰接,传动轴3322另一端与传动板3324端部铰接,所述的传动板3324与第二翻转电机3321的输出轴固定连接,第二翻转电机3321的输出轴和第三轴332与第二轴331铰接轴平行。所述的第三轴332与第二轴331的铰接处位于第三轴332与第四轴333的连接处和延伸板3323与传动轴3322铰接处之间。第二翻转电机3321转动时带动传动板3324转动,进而带动传动轴3322在竖直方向上运动,通过传动轴3322在竖直方向上的运动带动第三轴332实现翻转。
进一步的,如图10所示,抓手单元34包括控制电机341和两组夹爪340,所述的控制电机341用于带动两组夹爪340相对运动或相向运动。所述的夹爪340包括驱动臂3401,所述的驱动臂3401一端设置有驱动齿轮3402,所述的驱动齿轮3402与控制电机341输出轴端部固定的齿轮啮合,通过控制控制电机341的转向进而控制两组夹爪340的分离或闭合。驱动臂3401中部与限位臂3403一端铰接,限位臂3403用于对驱动臂3401起到稳定和限定行程的作用。
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
- 一种便携式无人机自动巡检平台
- 一种为巡检无人机提供服务的自动化平台